




 廣告
廣告





















































超聲波雷達(dá)在汽車上的應(yīng)用
2018-12-21 18:44:49· 來源:智車科技

超聲波雷達(dá)是一款極其常見的傳感器。在倒車時(shí),慢慢挪動(dòng)車子的過程中,在駕駛室內(nèi)能聽到滴滴滴的蜂鳴聲,這些聲音就是根據(jù)超聲波雷達(dá)的檢測距離給司機(jī)的反饋信息
超聲波雷達(dá)是一款極其常見的傳感器。在倒車時(shí),慢慢挪動(dòng)車子的過程中,在駕駛室內(nèi)能聽到“滴滴滴”的蜂鳴聲,這些聲音就是根據(jù)超聲波雷達(dá)的檢測距離給司機(jī)的反饋信息。
短距離測量中,超聲波測距傳感器具有非常大的優(yōu)勢。多用在倒車?yán)走_(dá)上。
它是汽車駐車或者倒車時(shí)的安全輔助裝置,幫助駕駛員掃除了視野死角和視線模糊的缺陷。
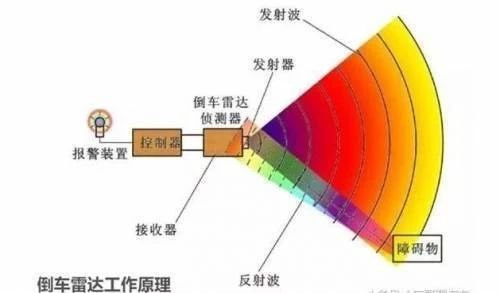
工作原理
超聲波雷達(dá)的工作原理是通過超聲波發(fā)射裝置向外發(fā)出超聲波,到通過接收器接收到發(fā)送過來超聲波時(shí)的時(shí)間差來測算距離。
常用探頭的工作頻率有 40kHz, 48kHz 和 58kHz 三種。一般來說,頻率越高,靈敏度越高,但水平與垂直方向的探測角度就越小,故一般采用 40kHz 的探頭。成本于探測距離成正比。
超聲波雷達(dá)防水、防塵,即使有少量的泥沙遮擋也不影響。探測范圍在 0.1-3 米之間,而且精度較高,因此非常適合應(yīng)用于泊車。
超聲波雷達(dá)數(shù)學(xué)模型
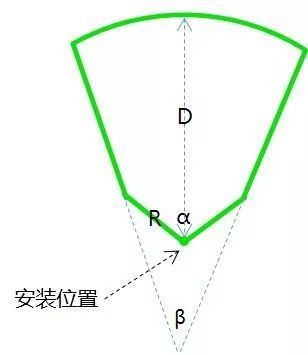
參數(shù)1:α
α是超聲波雷達(dá)的探測角,一般UPA的探測角為120°左右,APA的探測角比UPA小,大概為80°。
參數(shù)2:β
β是超聲波雷達(dá)檢測寬度范圍的影響因素之一,該角度一般較小。UPA的β角為20°左右,APA的β角比較特殊,為0°。
參數(shù)3:R
R也是超聲波雷達(dá)檢測寬度范圍的影響因素之一,UPA和APA的R值差別不大,都在0.6m左右。
參數(shù)4:D
D是超聲波雷達(dá)的最大量程。UPA的最大量程為2米~2.5米,APA的最大量程至少是5米,目前已有超過7m的APA雷達(dá)在業(yè)內(nèi)使用。
類型
UPA和APA
常見的超聲波雷達(dá)有兩種。
第一種是安裝在汽車前后保險(xiǎn)杠上的,也就是用于測量汽車前后障礙物的倒車?yán)走_(dá),這種雷達(dá)業(yè)內(nèi)稱為UPA;
第二種是安裝在汽車側(cè)面的,用于測量側(cè)方障礙物距離的超聲波雷達(dá),業(yè)內(nèi)稱為APA。
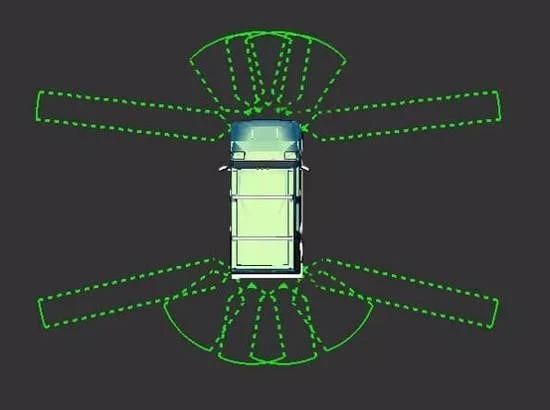
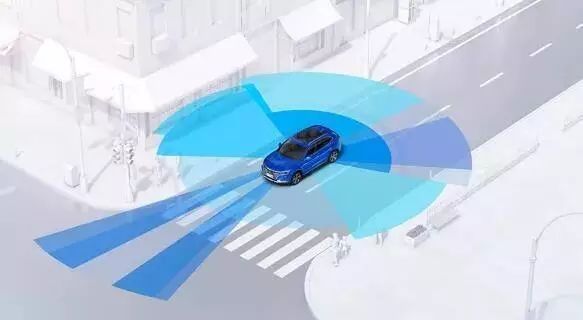
UPA和APA的探測范圍和探測區(qū)域都太相同,如下圖所示。圖中的汽車配備了前后向共8個(gè)UPA,左右側(cè)共4個(gè)APA。
UPA超聲波雷達(dá)的探測距離一般在15~250cm之間,主要用于測量汽車前后方的障礙物。如圖所示,為單個(gè)UPA的探測范圍示意圖。

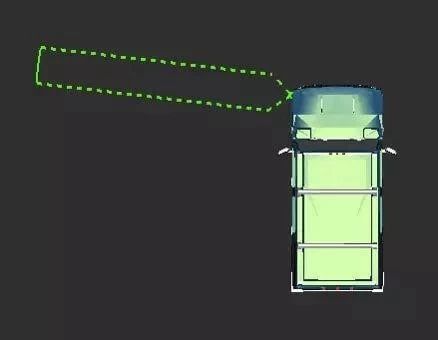
APA超聲波雷達(dá)的探測距離一般在30~500cm之間。APA的探測范圍更遠(yuǎn),因此相比于UPA成本更高,功率也更大。如圖為單個(gè)APA的探測范圍示意圖。APA的探測距離優(yōu)勢讓它不僅能夠檢測左右側(cè)的障礙物,而且還能根據(jù)超聲波雷達(dá)返回的數(shù)據(jù)判斷停車庫位是否存在。
優(yōu)勢與劣勢
優(yōu)勢
超聲波的能量消耗較緩慢,在介質(zhì)中傳播的距離比較遠(yuǎn),穿透性強(qiáng)。
測距的方法簡單,距離=傳播速度*傳播時(shí)間/2。
成本低。下圖waymo測試車車頂上的64線激光雷達(dá),價(jià)值8萬美金。超聲波雷達(dá)只需要幾十元人民幣,且技術(shù)成熟穩(wěn)定。

劣勢
超聲波雷達(dá)在速度很高情況下測量距離有一定的局限性,這是因?yàn)槌暡ǖ膫鬏斔俣群苋菀资芴鞖馇闆r的影響,在不同的天氣情況下,超聲波的傳輸速度不同,而且傳播速度較慢,當(dāng)汽車高速行駛時(shí),使用超聲波測距無法跟上汽車的車距實(shí)時(shí)變化,誤差較大。
另一方面,超聲波散射角大,方向性較差,在測量較遠(yuǎn)距離的目標(biāo)時(shí),其回波信號(hào)會(huì)比較弱,影響測量精度。但是,在短距離測量中,超聲波測距傳感器具有非常大的優(yōu)勢。
在車速很高的情況下有局限性,因?yàn)槌晜鞑ニ俣仁芴鞖馇闆r影像,不同天氣,不同傳播速度,且傳播速度的慢。15度左右為340米/秒,溫度越高速度越快。
應(yīng)用
泊車庫位檢測、高速橫向輔助
超聲波雷達(dá)除了用于倒車?yán)走_(dá)距離檢測外,還主要用于
泊車庫位檢測
自動(dòng)泊車功能需要經(jīng)歷兩個(gè)階段:1.識(shí)別庫位;2.倒車入庫
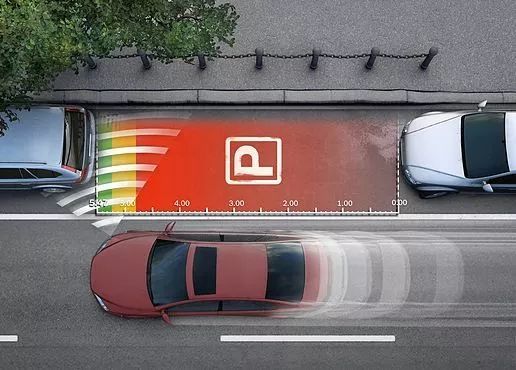
汽車緩緩駛過庫位時(shí),汽車右前方的APA傳感器返回的探測距離與時(shí)間的關(guān)系。
將t1時(shí)刻到t2時(shí)刻的車速做積分即可得到庫位的近似長度,如果近似認(rèn)為汽車為勻速行駛,直接用車速乘以(t2-t1)即可。當(dāng)檢測的長度超過車輛泊入所需的最短長度時(shí)則認(rèn)為當(dāng)前空間有車位。
同樣后側(cè)向的APA也會(huì)生成類似信號(hào)曲線,用以做庫位的二次驗(yàn)證。
有了庫位檢測功能,進(jìn)而開發(fā)自主泊車功能就不是難事了。
高速橫向輔助
特斯拉Model S在AutoPilot 1.0時(shí)代就實(shí)現(xiàn)了高速公路的巡航功能,為了增加高速巡航功能的安全性和舒適性,特斯拉將用于泊車的APA超聲波雷達(dá),也用在了高速巡航上。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 75



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
