




 廣告
廣告





















































基于數(shù)據(jù)耦合的混合動力汽車分布式測試平臺
2019-07-22 21:59:56· 來源:中國汽研

1、概述針對于正向開發(fā)過程中存在的整車性能測試與策略驗證,目前有三種方法被廣泛采用,即模型在環(huán)(Model in the loop, MIL)、硬件在環(huán)(Hardware in the loop

1、概述
針對于正向開發(fā)過程中存在的整車性能測試與策略驗證,目前有三種方法被廣泛采用,即模型在環(huán)(Model in the loop, MIL)、硬件在環(huán)(Hardware in the loop, HIL)與整車在環(huán)(Vehicle in the loop, VIL),分別應(yīng)用于車輛研發(fā)過程的各個階段。傳統(tǒng)的HIL受測試空間限制,一方面會喪失被測對象的硬件拓撲配置可編輯性。此外,傳統(tǒng)HIL可還原的測試場景有限,且較難同步反應(yīng)交通流、環(huán)境溫度、海拔高度以及駕駛風格的變化。
HEV系統(tǒng)具有多能量源耦合的特點,針對其集成化驅(qū)動系統(tǒng)的HIL測試只能通過對原有測試平臺的改造實現(xiàn)(如在原有發(fā)動機HIL上通過轉(zhuǎn)矩耦合器并入被測動力總成驅(qū)動電機,以實現(xiàn)對于HEV 集成化驅(qū)動系統(tǒng)的模擬),造成測評成本增高。分布式在環(huán)測試平臺(Distributed—X in the Loop, D-XIL)為解決上述問題提供了有效技術(shù)路徑。
2、整體架構(gòu)
D-XIL最大化利用了混合動力汽車(HEV)硬件在環(huán)(HIL)測試設(shè)備的硬件基礎(chǔ),通過數(shù)據(jù)耦合的思想,將作為中央控制節(jié)點的服務(wù)器,作為實車在環(huán)(VIL) 的純電動汽車(EV),與作為模擬HEV子系統(tǒng)的發(fā)動機硬件在環(huán)實驗臺架(Engine in the loop,EIL)以及電池硬件在環(huán)實驗臺架(Battery in the loop,BIL)整合在一起,從而組合為具有實車在環(huán)的分布式HEV性能測試平臺(Distributed—Vehicle in the Loop, D-VIL) ,整體架構(gòu)如圖1[1]所示。

圖1 測試平臺整體架構(gòu)
“分布式”即在測試實施過程中,被測車輛實體、動力總成、電池系統(tǒng)以及整車或子系統(tǒng)控制器為物理分開布置形式,如圖2[2]所示。


圖2 試驗硬件物理耦合架構(gòu)及地理位置分布
3
數(shù)據(jù)通訊方式
如果硬件間的數(shù)據(jù)耦合與數(shù)據(jù)交換交由互聯(lián)網(wǎng)實現(xiàn),則測試平臺進化為基于互聯(lián)網(wǎng)的分布式實車在環(huán)測試平臺(Internet Distributed—Vehicle in the Loop, ID-VIL),在構(gòu)建互聯(lián)網(wǎng)分布式HIL拓撲時,需要在原有系統(tǒng)上選擇若干“耦合點”,斷開其對應(yīng)的物理耦合關(guān)系,改用基于數(shù)據(jù)通信的數(shù)據(jù)耦合關(guān)系替代。數(shù)據(jù)耦合架構(gòu)如圖3所示。

圖3 數(shù)據(jù)耦合架構(gòu)
在測試的實施過程中,通過車聯(lián)網(wǎng)將被測EV接入分布式系統(tǒng),測試平臺數(shù)據(jù)鏈的流向?qū)l(fā)生變化。雖然整個系統(tǒng)的網(wǎng)絡(luò)拓撲仍為服務(wù)器(Cloud Server)→客戶端(包括EIL,BIL和EV) 模式,但是此刻數(shù)據(jù)流交換的起始邏輯端將變?yōu)楸粶yEV端的駕駛員輸入。測試平臺會首先將駕駛員輸入送入Cloud Server,隨后Cloud將根據(jù)HEV 整車模型計算各個HIL(包含發(fā)動機和電池)所需的功率輸出并發(fā)送,接著各個HIL 根據(jù)Cloud Server的需求調(diào)整自身輸出并將本地傳感器實際測量到的輸出回傳給Cloud Server,Cloud Server再根據(jù)HEV 整車模型整合各個HIL 反饋的實際輸出得到整車實際可用的驅(qū)動轉(zhuǎn)矩并將其發(fā)送給EV,最后EV將Cloud Server回傳的整車驅(qū)動轉(zhuǎn)矩作為車載電機驅(qū)動轉(zhuǎn)矩的給定值,測試過程中的數(shù)據(jù)交換架構(gòu)如圖4所示。

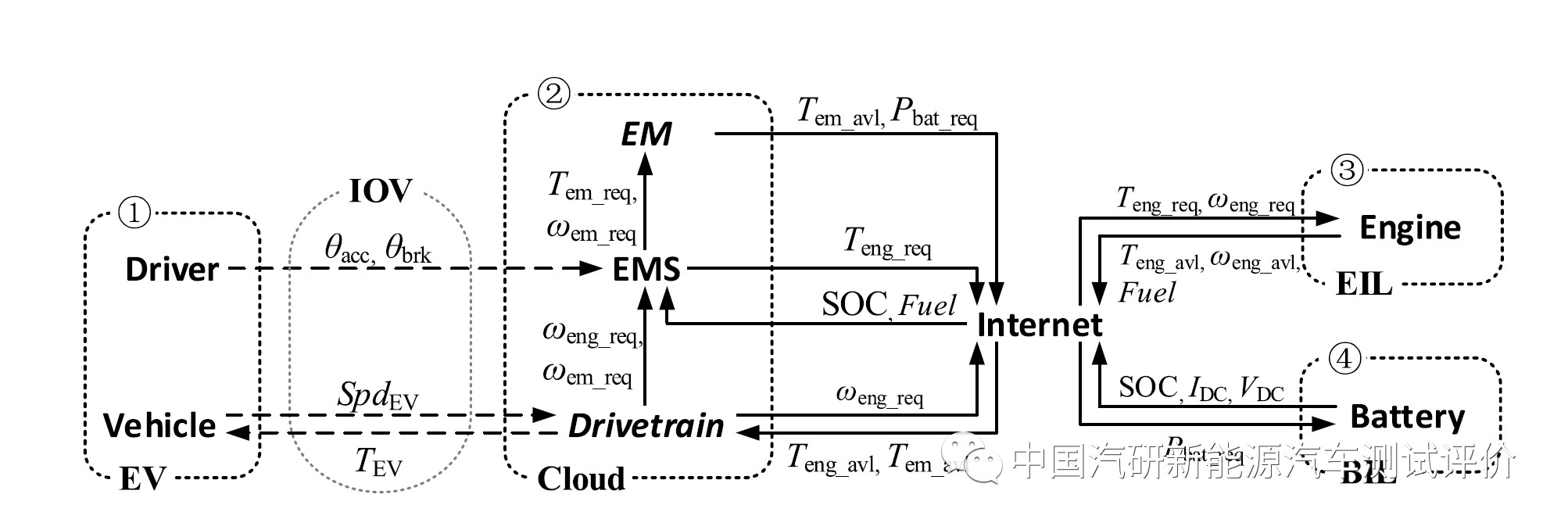
圖4 數(shù)據(jù)交換架構(gòu)
4、小結(jié)
具備高數(shù)據(jù)傳輸速率與低延遲網(wǎng)絡(luò)等眾多優(yōu)勢的5G移動通訊技術(shù)迅猛發(fā)展和未來的商業(yè)化應(yīng)用將解決ID-VIL實現(xiàn)的最大瓶頸,云端數(shù)據(jù)傳輸和數(shù)據(jù)交換可靠性的進一步保證提升了ID-VIL在車輛的正向開發(fā)及整體性能測試評價方面的應(yīng)用潛力,從總體上來說,ID-VIL具有以下幾個顯著優(yōu)點:
(1) 解決測試評價硬件拓撲構(gòu)型限制,被測EV無需安裝混合動力系統(tǒng)(其中包括發(fā)動機或電池),通過與Cloud Server的數(shù)據(jù)耦合就可以使得其動力特性與安裝了混合動力系統(tǒng)的HEV一致;
(2) 突破測試評價地域限制,使得跨地域測試評價未來可期;
(3) 拓展測試評價范圍,實車測試比循環(huán)工況(如NEDC或UDDS)更能反映真實情況(如天氣或交通擁堵),提升整車能量管理策略的精細化匹配;另外,方面加入測試評價人員主觀駕乘感受,便于整車綜合性能的精準化優(yōu)化。
后續(xù)文章我們將對于ID-VIL的網(wǎng)絡(luò)拓撲結(jié)構(gòu)及針對網(wǎng)絡(luò)延遲的系統(tǒng)透明度(transparency)分析和測試過程中網(wǎng)絡(luò)斷開的應(yīng)急處理機制做進一步介紹。
參考文獻
[1] Zhang, Yi, et al. "Internet-distributed vehicle-in-the-loop simulation for HEVs." IEEE Transactions on Vehicular Technology 67.5 (2018): 3729-3739.
[2] Niu, Wenxu, et al. "Transparency of a Geographically Distributed Test Platform for Fuel Cell Electric Vehicle Powertrain Systems based on X-in-the-Loop Approach." Energies 11.9 (2018): 2411.



 廣告
廣告 

最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
