




 廣告
廣告





















































首頁(yè) > 動(dòng)力性能測(cè)試 > 正文
動(dòng)力總成懸置系統(tǒng)疲勞強(qiáng)度試驗(yàn)標(biāo)準(zhǔn)的研究
2021-10-08 10:08:47· 來(lái)源:汽車NVH云講堂

摘 要本文以某轎車動(dòng)力總成懸置系統(tǒng)疲勞強(qiáng)度試驗(yàn)為例,對(duì)發(fā)動(dòng)機(jī)側(cè)懸置展開(kāi)詳細(xì)介紹了懸置系統(tǒng)疲勞強(qiáng)度試驗(yàn)方案、載荷測(cè)量、載荷壓縮技術(shù)和試驗(yàn)結(jié)果分析。通過(guò)三
摘 要
本文以某轎車動(dòng)力總成懸置系統(tǒng)疲勞強(qiáng)度試驗(yàn)為例,對(duì)發(fā)動(dòng)機(jī)側(cè)懸置展開(kāi)詳細(xì)介紹了懸置系統(tǒng)疲勞強(qiáng)度試驗(yàn)方案、載荷測(cè)量、載荷壓縮技術(shù)和試驗(yàn)結(jié)果分析。通過(guò)三組動(dòng)態(tài)試驗(yàn)考核動(dòng)力總成懸置系統(tǒng)的疲勞強(qiáng)度,最終建立一套可靠的疲勞強(qiáng)度試驗(yàn)標(biāo)準(zhǔn)。
關(guān)鍵詞
動(dòng)力總成懸置系統(tǒng),試驗(yàn)方案設(shè)計(jì),載荷采集,載荷壓縮,試驗(yàn)結(jié)果分析
1. 引言
動(dòng)力總成懸置系統(tǒng)作為動(dòng)力總成與車架/底盤之間的彈性連接系統(tǒng).從隔振的角度來(lái)說(shuō),要求懸置剛度越小越好,以將振動(dòng)隔離至最小;而從支承和限位的角度而言,考慮到空間結(jié)構(gòu)的局限性,要求懸置剛度越大越好,以避免動(dòng)力總成在極端載荷沖擊下產(chǎn)生很大的位移,影響動(dòng)力輸出,甚至與發(fā)動(dòng)機(jī)艙某些部位產(chǎn)生干涉[1]。同時(shí),隨著用戶對(duì)舒適性要求的不斷提高,各種具有多段隔振特性的液壓懸置系統(tǒng)被逐漸推廣。這樣在大大提高動(dòng)力總成懸置系統(tǒng)減震特性的同時(shí),對(duì)懸置系統(tǒng)的疲勞耐久性和整個(gè)壽命周期內(nèi)的性能穩(wěn)定性提出了更高的要求。
本文以某轎車橫置動(dòng)力總成懸置系統(tǒng)疲勞驗(yàn)證開(kāi)發(fā)為例,根據(jù)發(fā)動(dòng)機(jī)側(cè)懸置系統(tǒng)展開(kāi)詳細(xì)介,1) 懸置系統(tǒng)總體疲勞強(qiáng)度試驗(yàn)臺(tái)架設(shè)計(jì)方案;2) 數(shù)據(jù)采集方案;3) 基于損傷等效的載荷壓縮;4) 試驗(yàn)臺(tái)架設(shè)計(jì);5) 試驗(yàn)結(jié)果分析;6) 總結(jié)形成懸置系統(tǒng)疲勞強(qiáng)度試驗(yàn)標(biāo)準(zhǔn)。
2. 動(dòng)力總成懸置系統(tǒng)試驗(yàn)臺(tái)架設(shè)計(jì)方案
2.1. 懸置系統(tǒng)布置特點(diǎn)和受力分析
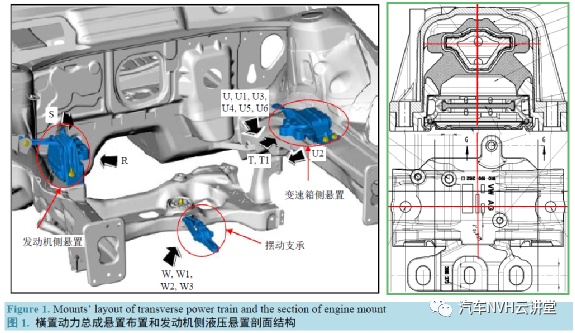
動(dòng)力總成懸置按分布位置分類,一般可分為發(fā)動(dòng)機(jī)側(cè)懸置和變速箱側(cè)懸置。通常發(fā)動(dòng)機(jī)側(cè)懸置多采用液壓懸置,主要為了盡可能的衰減發(fā)動(dòng)機(jī)燃燒和旋轉(zhuǎn)運(yùn)動(dòng)引起的劇烈震動(dòng),故為縱向(X)和垂向(Z) 2個(gè)自由度方向上約束[1];相比較而言,變速箱側(cè)懸置一般采用橡膠懸置,除了衰減震動(dòng)外并提供動(dòng)力總成的橫向限位,故為縱向(X)、側(cè)向(Y)和垂向(Z) 3 個(gè)自由度方向上約束[1]。
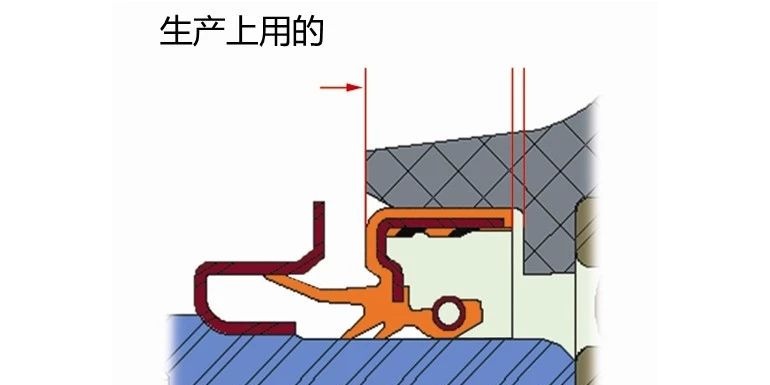
圖1 為本文所涉及的橫置動(dòng)力總成懸置總成布置和發(fā)動(dòng)機(jī)側(cè)液壓懸置剖面結(jié)構(gòu)。
2.2.1. 懸置系統(tǒng)總成道路模擬試驗(yàn)
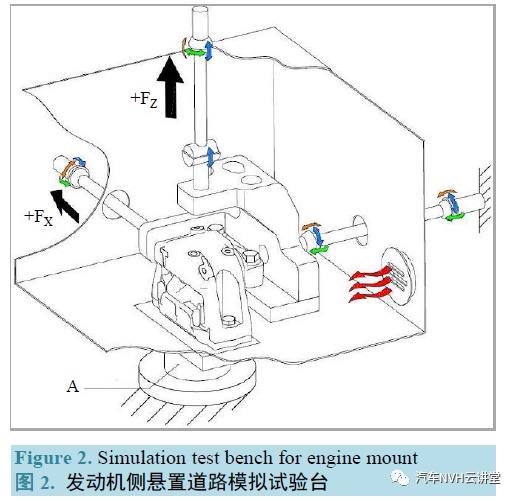
由于懸置系統(tǒng)總成為純橡膠彈性體或橡膠彈性體和液壓阻尼減震模塊合成,表現(xiàn)為典型的粘彈性材料特性,呈現(xiàn)出各向異性和多段非線性剛度。所以其受力與頻率密切相關(guān)。因此,對(duì)于發(fā)動(dòng)機(jī)側(cè)懸置,采用2 自由度(縱向和垂向)道路模擬試驗(yàn),圖2 為發(fā)動(dòng)機(jī)側(cè)懸置2 自由度(縱向和垂向)道路模擬試驗(yàn)臺(tái)架草圖。同時(shí),引入多軸雨流投影技術(shù)對(duì)道路載荷進(jìn)行基于損傷等效的壓縮,從而實(shí)現(xiàn)多軸載荷道路模擬加速試驗(yàn)。具體載荷壓縮在下一章節(jié)詳細(xì)展開(kāi)。
2.2.2. 懸置系統(tǒng)部件——金屬支架強(qiáng)化試驗(yàn)
懸置系統(tǒng)與發(fā)動(dòng)機(jī)側(cè)連接支架為鋁制金屬件,在一定頻率范圍內(nèi)(通常在100 Hz 以內(nèi)),加載頻率對(duì)金屬疲勞強(qiáng)度無(wú)影響[2]-[4]。為了保證試件實(shí)際主應(yīng)力平面不變和考慮到主要承受縱向和垂向載荷引起的彎矩,故以支架縱向和垂向道路應(yīng)變?yōu)檩d荷目標(biāo),采用2 軸峰谷值切片定頻加試驗(yàn),即通過(guò)峰谷值切片抽取技術(shù)[5] (Peak Valley Slicing)提取縱向和垂向的峰谷值并保留其兩者間相位關(guān)系,并按照試驗(yàn)臺(tái)可實(shí)現(xiàn)的最大頻率來(lái)重構(gòu)峰谷值序列實(shí)現(xiàn)試驗(yàn)加速,這樣確保載荷損傷最大化保留和載荷間相位關(guān)系正確[2]-[4]。
2.2.3. 懸置系統(tǒng)部件——金屬殼體強(qiáng)化試驗(yàn)
懸置殼體固定于車架上,用于承受由支架傳遞到純橡膠彈性體或橡膠彈性體和液壓阻尼減震模塊合成體上的所有載荷。考慮到縱向和垂向在殼體的作用點(diǎn)各不相同,從簡(jiǎn)化試驗(yàn)臺(tái)的角度出發(fā),對(duì)于發(fā)動(dòng)機(jī)側(cè)懸置的殼體,分拆為2 個(gè)單軸多級(jí)定頻加載試驗(yàn)。即根據(jù)傳統(tǒng)八級(jí)加載法原理[2]-[4],以支架各向獨(dú)立應(yīng)變?yōu)橹鳎诿總€(gè)單獨(dú)載荷方向上,將道路載荷損傷等效為多級(jí)正弦加載序列(Block Cycle) [5],并按照試驗(yàn)臺(tái)可實(shí)現(xiàn)的最大頻率來(lái)加速試驗(yàn)頻率,從而實(shí)現(xiàn)試驗(yàn)簡(jiǎn)化和加速。
3. 載荷測(cè)量方案和試驗(yàn)路面選擇
3.1. 載荷測(cè)量方案
鑒于前置–前驅(qū)動(dòng)力總成的主減速器僅位于前軸,其作用在動(dòng)力總成上的驅(qū)動(dòng)反力矩較其他驅(qū)動(dòng)形式大,所以對(duì)懸置極限工況下的靜剛度要求更高。故采用前置–前驅(qū)式動(dòng)力總成的車輛作為測(cè)量目標(biāo)車輛。
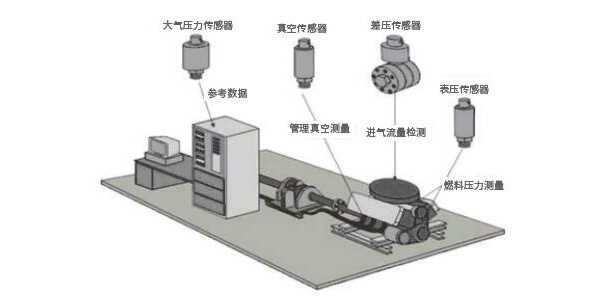
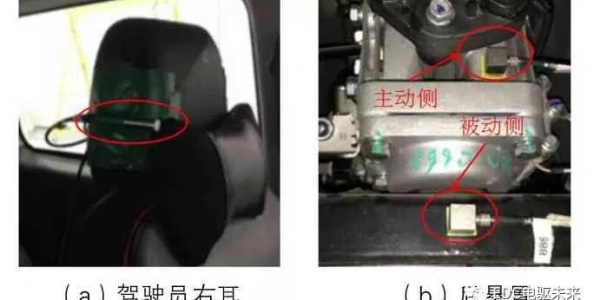
為了有效地獲得動(dòng)力總成懸置系統(tǒng)及部件的實(shí)際受力情況和溫度環(huán)境,主要采取應(yīng)變片、測(cè)量輪、加速度傳感器、溫度傳感器等多種測(cè)量手段。其中以應(yīng)變測(cè)量為主,借助CAD/CAE 計(jì)算分析結(jié)果找出零件各個(gè)受力方向的敏感位置并利用惠斯頓電橋加減特性合理布片,如圖3,最大層度上把各個(gè)方向上的應(yīng)變完全解耦,從而獲得“純凈”的單方向敏感的應(yīng)變通道,并在黏貼后臺(tái)通過(guò)臺(tái)架加載驗(yàn)證解耦效果。

3.2. 試驗(yàn)路面選擇
鑒于橫置動(dòng)力總成懸置系統(tǒng)受力特性,除了考慮路面不平整引起的載荷外,還必須考慮人為操控引起的載荷。因此,在載荷測(cè)量時(shí),除了選取一些典型的強(qiáng)化道路外,還需要兼顧交變耐久道路和動(dòng)態(tài)試驗(yàn)區(qū)的特殊工況,具體表1。
4. 基于多軸雨流投影的多軸載荷壓縮技術(shù)[6]
為了進(jìn)一步縮短試驗(yàn)時(shí)間,這里把懸置系統(tǒng)總成道路模擬試驗(yàn)的道路載荷譜基于多軸雨流投影進(jìn)行載荷壓縮(過(guò)濾)。
4.1. 多軸雨流投影概念
基于線彈性理論可知,物體局部的應(yīng)力張量

可以表示為:

這里

為載荷貢獻(xiàn)因子(權(quán)重),

為載荷方向因子,為外部載荷。
通常,基于

描述的載荷傳遞路徑是很難完全獲得的或者說(shuō)僅能通過(guò)廣義有限元計(jì)算獲得。此外,對(duì)于優(yōu)化設(shè)計(jì)的結(jié)構(gòu)來(lái)說(shuō),關(guān)鍵應(yīng)力位置更是無(wú)法精確預(yù)知的。所以通常無(wú)法從外部載荷Lk (t) 直接簡(jiǎn)單的精確計(jì)算局部應(yīng)力時(shí)間歷程

。
但對(duì)于臺(tái)架試驗(yàn)來(lái)說(shuō),既要盡可能壓縮載荷,又要能夠精確模擬多軸載荷的相互耦合。因此更迫切需要采用壓縮的載荷
,即局部應(yīng)力時(shí)間歷程

。所以為了實(shí)現(xiàn)多軸載荷的壓縮,必須要確保壓縮后的載荷
保留了原有多軸載荷的雨流屬性。從上述載荷路徑的描述來(lái)看,如果能獲得所有傳遞路徑上的載荷方向(投影方向),那么基于雨流投影方向上多軸載荷壓縮是可以被實(shí)現(xiàn)的:

這里 β 為單位向量,用于實(shí)現(xiàn)原始載荷 L k( t )向壓縮載荷

的轉(zhuǎn)化。這就是多軸雨流投影技術(shù)的概念假設(shè)。通過(guò)這樣的假設(shè),那么所有成熟的被廣泛接受和認(rèn)可的基于單軸雨流計(jì)數(shù)法均可以被直接擴(kuò)展到多軸載荷上,即各個(gè)載荷方向(投影方向)上的(單軸)雨流屬性。當(dāng)然,從這里具體案例分析看,可以把這里定義的“各個(gè)方向”縮減到“許多主要方向”上投影(通常,鑒于存儲(chǔ)和計(jì)算速度,一般多軸的數(shù)量被限制在6 個(gè)自由度以下)。
4.2. 雨流投影方向矢量的構(gòu)造
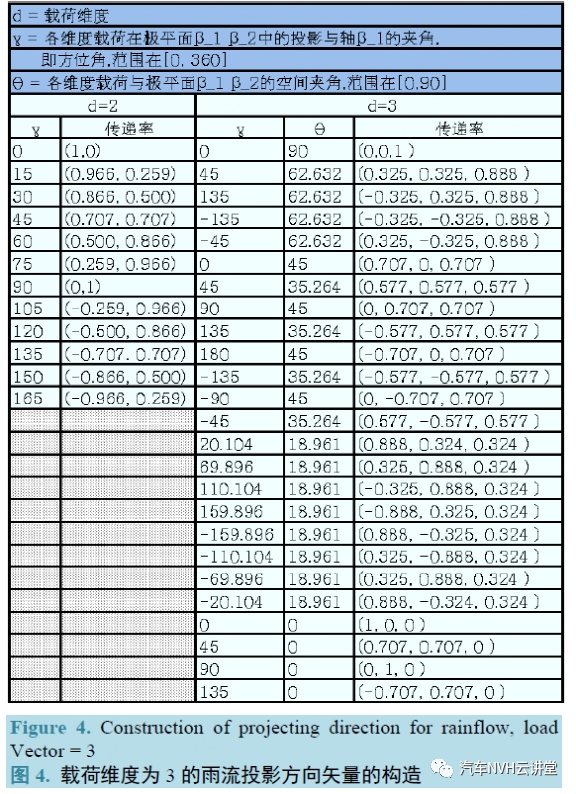
通常對(duì)于載荷維度為2 的,其投影方向矢量可用15 度等分半圓極平面來(lái)構(gòu)造;而對(duì)于載荷維度為3的,其投影方向矢量可基于半球體,并以極平面加方向角來(lái)構(gòu)造,如圖4。
4.3. 投影方向矢量上雨流矩陣的滯后環(huán)濾波方程構(gòu)造(壓縮)
所謂多軸雨流計(jì)算其實(shí)質(zhì)是在各投影方向矢量平面上基于單軸雨流計(jì)數(shù)方式來(lái)計(jì)算各方向矢量平面上結(jié)果的集合。同時(shí),為了方便比較各投影方向矢量平面上雨流矩陣,其雨流幅值范圍和單位柵格的寬度均是一致的。假設(shè)任一投影方向矢量平面上,載荷維度為 d 的時(shí)域載荷所得投影幅值范圍為

。同樣將載荷維度為d 的時(shí)域載荷構(gòu)造為立方體并置于最小包絡(luò)球體內(nèi),如圖5。
這是將時(shí)域信號(hào)
投影到方向矢量平面 β上,可得:
這樣該投影方向矢量平面β上,雨流矩陣的信息都可以基于幅值范圍UG OG ββ和自定義的N 個(gè)幅值格柵來(lái)獲得。這時(shí),可以根據(jù)設(shè)定的幅值濾波寬帶來(lái)對(duì)該投影方向矢量平面上的雨流矩陣進(jìn)行幅值濾波(壓縮)。假設(shè)滯后環(huán)幅值濾波器
,那么滯后環(huán)濾波方程可構(gòu)造為:
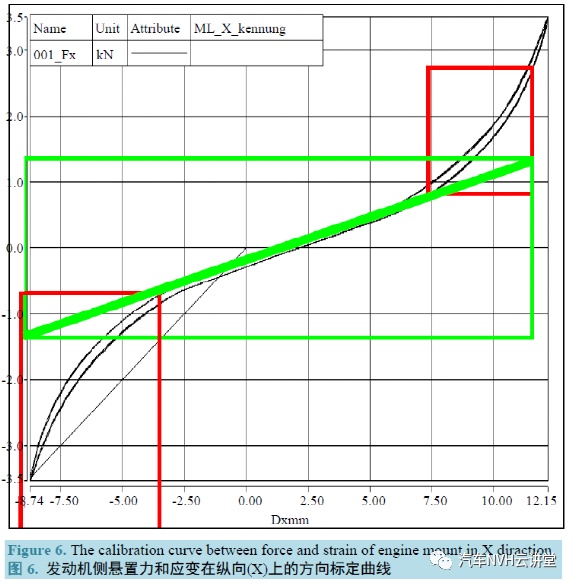
最終,獲得該投影方向矢量平面β 上的雨流計(jì)算矩陣RFM_β 和余數(shù)RES_β。這里,以發(fā)動(dòng)機(jī)側(cè)懸置縱向x 方向?yàn)槔齺?lái)如何尋找合理的幅值濾波寬帶。首先,對(duì)懸置支架縱向x 方向進(jìn)行簡(jiǎn)單標(biāo)定,找出力和應(yīng)變之間的簡(jiǎn)單標(biāo)定系數(shù)。通過(guò)標(biāo)定所得性能曲線得知,在Fx < −0.8 kN 和Fx > +0.8 kN 范圍內(nèi),力和位移呈現(xiàn)非線性變化關(guān)系,說(shuō)明橡膠和金屬處于緊密觸擊狀態(tài);在−0.8 kN < Fx < +0.8 kN 范圍內(nèi),力和位移呈現(xiàn)線性關(guān)系。因此,可以確定Fx 位于−0.8 kN~+0.8 kN 之間的信號(hào)作為主要編輯對(duì)象,用于幅值濾波帶寬的設(shè)定,如下圖6。最后,根據(jù)力和應(yīng)變標(biāo)定系數(shù),將上述力幅值濾波(壓縮)范圍轉(zhuǎn)換為應(yīng)變幅值濾波(壓縮)范圍,再將該應(yīng)變幅值濾波(壓縮)范圍除以整個(gè)信號(hào)應(yīng)變幅值范圍,即獲得可用于雨流投影壓縮的核心參數(shù)–幅值濾波帶寬。
總之,為了從整體上獲得多軸載荷之間的耦合關(guān)系(或相位關(guān)系),多軸雨流投影技術(shù)實(shí)質(zhì)就是將多軸載荷投影到精確構(gòu)造的方向矢量平面上來(lái)尋找真正的多軸載荷作用下的主應(yīng)力平面。其關(guān)鍵就是投影方向矢量平面的構(gòu)造。
幅值濾波(壓縮)范圍,再將該應(yīng)變幅值濾波(壓縮)范圍除以整個(gè)信號(hào)應(yīng)變幅值范圍,即獲得可用于雨流投影壓縮的核心參數(shù)–幅值濾波帶寬。
總之,為了從整體上獲得多軸載荷之間的耦合關(guān)系(或相位關(guān)系),多軸雨流投影技術(shù)實(shí)質(zhì)就是將多軸載荷投影到精確構(gòu)造的方向矢量平面上來(lái)尋找真正的多軸載荷作用下的主應(yīng)力平面。其關(guān)鍵就是投影方向矢量平面的構(gòu)造。
這里必須特別說(shuō)明的是,前面本文細(xì)述了載荷維度為2 和3 的多載荷下方向矢量平面構(gòu)造,但其均基于半圓或半球。這主要是因?yàn)楫?dāng)正半球上基于投影方向矢量平面β 的雨流矩陣已知的情況下,其負(fù)半球

上的相應(yīng)雨流矩陣也就很容易計(jì)算出來(lái)。此結(jié)論可以有以下推理來(lái)驗(yàn)證:
因此,可以將投影方向矢量限制在正半球以大大減少計(jì)算量,即 d 0 β > 。
4.4. 投影方向矢量平面上相對(duì)損傷的計(jì)算[2]-[4]
為了方便比較各投影方向矢量平面上的損傷結(jié)果,所以只關(guān)注相對(duì)損傷,不考慮真實(shí)損傷或壽命。
這樣在所有投影方向矢量平面上的相對(duì)損傷計(jì)算都基于統(tǒng)一簡(jiǎn)單的S-N 曲線,無(wú)均值應(yīng)力修正。這也從另一方面證明了S S −β β = ,即負(fù)半球 d 0 β < 上的相應(yīng)雨流矩陣計(jì)算可以省略。主要采用基于初級(jí)Miner法則的S-N 曲線:
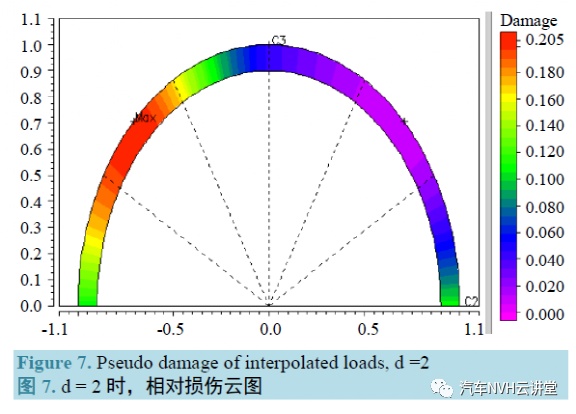
對(duì)比各投影方向矢量平面上損傷結(jié)果的目的是尋找多軸載荷作用下的空間主應(yīng)力方向。通常,其潛在的相對(duì)損傷可以用貢獻(xiàn)因子柱狀圖和云圖來(lái)表示,如圖7。
另外,這里不得不說(shuō)明的是由于篇幅的原因,無(wú)法針對(duì)基于雨流投影的多軸載荷壓縮過(guò)程中數(shù)據(jù)存儲(chǔ)、多軸載荷壓縮后續(xù)所需的雨流時(shí)域重構(gòu)法則和多軸載荷時(shí)域刪除(壓縮)進(jìn)行詳述。
5. 試驗(yàn)臺(tái)架設(shè)計(jì)
這里以發(fā)動(dòng)機(jī)側(cè)懸置系統(tǒng)總成道路模擬試驗(yàn)為例,為了將來(lái)廣泛快速的開(kāi)展相應(yīng)的總成耐久試驗(yàn),并確保加載到懸置系統(tǒng)總成的載荷為盡可能正確的載荷,即在高頻下不受慣性力影響,在臺(tái)架設(shè)計(jì)時(shí),在懸置總成底部引入三向載荷測(cè)量力傳感器,如圖8。在完成發(fā)動(dòng)機(jī)側(cè)懸置系統(tǒng)總成道路模擬試驗(yàn)應(yīng)變迭代后,采集懸置總成底部三向力傳感器對(duì)應(yīng)的力載荷,并最終將其作為將來(lái)其他類似懸置道路模擬的迭代目標(biāo)信號(hào)[7]。

另外,考慮到發(fā)動(dòng)機(jī)側(cè)懸置系統(tǒng)總成位于發(fā)動(dòng)機(jī)艙內(nèi),靠近發(fā)動(dòng)機(jī)排氣歧管,必須在振動(dòng)載荷的基礎(chǔ)上考慮溫度場(chǎng)對(duì)彈性體的疲勞壽命和整個(gè)壽命周期內(nèi)的性能穩(wěn)定性的影響。在道路模擬試驗(yàn)時(shí),引入簡(jiǎn)易溫度箱加熱風(fēng)槍來(lái)模擬懸置總成附件的溫度環(huán)境,更有效的考核懸置總成疲勞強(qiáng)度。
6. 試驗(yàn)結(jié)果分析[2]
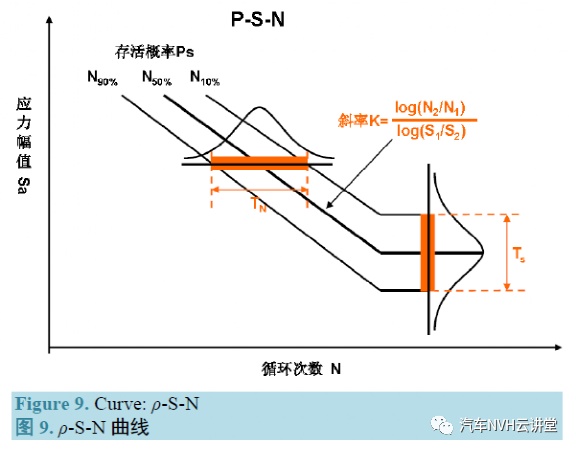
基于ρ -S-N 曲線的實(shí)際壽命預(yù)測(cè)來(lái)評(píng)估總成或零部件的真實(shí)疲勞壽命。ρ -S-N 曲線是一些不同成活率 ρ 下的S-N 曲線族,圖 9。
一般情況下,可以近似認(rèn)為在給定的應(yīng)力水平下失效循環(huán)次數(shù)分布(疲勞壽命)或在給定有限壽命下載荷分布,符合正態(tài)分布或近似正態(tài)分布。通常,ρ -S-N 曲線在有限壽命階段的HCF 高周疲勞段(103 ~ 106~7 )在雙對(duì)數(shù)坐標(biāo)系上近似為一直線:
其中 Nρ 是存活率為ρ 時(shí)的疲勞壽命;S 是應(yīng)力;aρ 和bρ 為與存活率有關(guān)材料常數(shù)。
在已知 3 到4 個(gè)總成或零部件實(shí)際疲勞壽命或者根據(jù)威布爾分布獲得試件個(gè)數(shù)的,可以預(yù)測(cè)存活率為N50% 的實(shí)際總成或零部件的疲勞壽命曲線:其斜率 k 可與目標(biāo)S-N 曲線相比較,并考慮其與目標(biāo)S-N曲線的交點(diǎn),從而評(píng)價(jià)總成或零部件真實(shí)的疲勞壽命。
7. 總結(jié)和結(jié)束語(yǔ)
通過(guò)本文以發(fā)動(dòng)機(jī)側(cè)懸置為例,對(duì)動(dòng)力總成懸置系統(tǒng)疲勞試驗(yàn)的研究,可以完整的建立動(dòng)力總成懸置系統(tǒng)疲勞強(qiáng)度試驗(yàn)認(rèn)可的試驗(yàn)標(biāo)準(zhǔn)。對(duì)于動(dòng)力總成懸置系統(tǒng)在疲勞強(qiáng)度認(rèn)可方面具有積極的借鑒意義和工程價(jià)值。
致 謝
感謝同濟(jì)大學(xué)汽車學(xué)院周鋐教授和MTS 公司金鋒高工,在本文寫作工程中的大力支持!
作者:李明,周鋐
作者單位:同濟(jì)大學(xué),汽車學(xué)院,上海
來(lái)源:Mechanical Engineering and Technology 機(jī)械工程與技術(shù), 2015, 4, 141-150
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 187



 廣告
廣告 編輯推薦

最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
