




 廣告
廣告





















































泛亞汽車 | 臺架模擬48V微混整車開發(fā)應(yīng)用研究
2021-11-24 12:57:02· 來源:電動學(xué)堂 作者:吳承文等

文章來源:泛亞汽車技術(shù)中心有限公司試驗認(rèn)證及試車場部引言隨著2016年我國第四階段《乘用車燃料消耗量限值》的頒布實(shí)施,2020年乘用車平均燃料消耗量達(dá)到5L/lOO
文章來源:泛亞汽車技術(shù)中心有限公司試驗認(rèn)證及試車場部
引言
隨著2016年我國第四階段《乘用車燃料消耗量限值》的頒布實(shí)施,2020年乘用車平均燃料消耗量達(dá)到5L/lOOkm。在法規(guī)政策驅(qū)動背景下混動車型的研發(fā)成為新的技術(shù)創(chuàng)新方向,其對應(yīng)的排放開發(fā)亦尤為重要。
目前,強(qiáng)混和插電式混合動力技術(shù)系統(tǒng)復(fù)雜、成本較高,48V微混系統(tǒng)以其低成本、高節(jié)油性能得到了各整車廠及電噴供應(yīng)商的認(rèn)同。在PO結(jié)構(gòu)的48V微混系統(tǒng)中,傳動帶驅(qū)動起動/發(fā)電一體機(jī)(belt-driven starter generator, BSG)得到應(yīng)用,取代了12V的發(fā)電機(jī)。
由于整車開發(fā)周期較長,為了縮短開發(fā)周期、降低開發(fā)成本,在開發(fā)階段完成對模型的驗證,V模式開發(fā)流程被廣泛應(yīng)用于整車開發(fā)領(lǐng)域。與此同時設(shè)計一種臺架真實(shí)模擬整車的行駛阻力、駕駛員、整車模型及整車功能從而使部分整車開發(fā)工作前置可以進(jìn)一步縮短V模式開發(fā)周期。本文主要研究某帶BSG電機(jī)的48V微混車型早期工程樣車造車前在動力總成臺架僅使用發(fā)動機(jī)+變速器+48V三電系統(tǒng),通過AVL Puma及Canoe軟件模擬整車行駛阻力,駕駛員特性,整車自動起停、加速踏板、制動踏板、電子排擋、空調(diào)負(fù)載等整車功能,完成某搭載BSG48V微混車型HCU軟件功能調(diào)試及HCU混動功能標(biāo)定開發(fā),同時通過Puma軟件編寫運(yùn)行WLTC循環(huán)與實(shí)車轉(zhuǎn)載WLTC排放循環(huán)對標(biāo),完成整車排放開發(fā),以縮短整車開發(fā)周期。
1臺架設(shè)計
1.1常規(guī)動力總成試驗室概括
常規(guī)動力總成臺架試驗室構(gòu)造主要是由AVLFEM數(shù)采模塊系統(tǒng)、INCA、發(fā)動機(jī)冷卻液、機(jī)油及變速器油溫控系統(tǒng)、AVLACS進(jìn)氣系統(tǒng)、中冷溫控系統(tǒng)、排氣流量計、AMA60排放分析儀、排氣抽風(fēng)系統(tǒng)、試驗室消防安全矩陣系統(tǒng)、帶空氣彈簧減震鐵平板系統(tǒng)、AVL740油耗儀供油系統(tǒng)、雙電力測功機(jī)系統(tǒng)、臺架運(yùn)轉(zhuǎn)主控軟件Puma、臺架公共水電氣能源系統(tǒng)、被測樣機(jī)等組成。
1.248V微混整車模擬臺架設(shè)計
48V輕度混合動力系統(tǒng)(簡稱48V系統(tǒng))由發(fā)動機(jī)管理系統(tǒng)、起停電機(jī)、DC-DC直流轉(zhuǎn)換器及電池管理系統(tǒng)組成。
按照電機(jī)所安裝位置的不同,48V微混系統(tǒng)可以分為BSG(belt-driven starter generator)以及ISG(:integrated starter generator)兩種形式。BSG通過傳動帶將起停電機(jī)與發(fā)動機(jī)相連,這也稱P0架構(gòu);ISG是將電機(jī)與發(fā)動機(jī)和變速器同軸布置,通過一個或多個離合器來控制發(fā)動機(jī)和電機(jī)的轉(zhuǎn)矩耦合,有Pl和P2兩種形式。
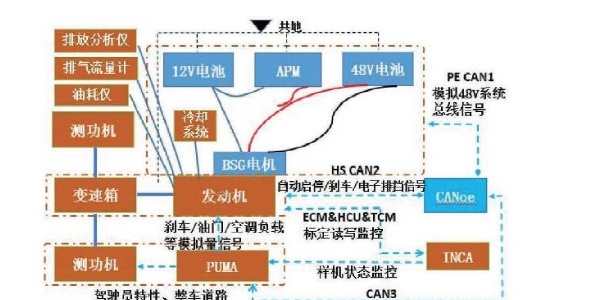
本文研究的是基于常規(guī)動力總成臺架帶BSG+APM+48V電池臺架模擬整車功能設(shè)計。臺架實(shí)際試驗對象為:BSG電機(jī)(帶MCU控制單元)、ECU(集成HCU控制單元)、TCM、APM、12V蓄電池、48V電池、改裝過適用于臺架的線束、發(fā)動機(jī)、變速器及半軸。由于要在該臺架完成HCU軟件功能調(diào)試、HCU混動功能標(biāo)定開發(fā)及WLTC循環(huán)排放開發(fā)并與整車轉(zhuǎn)載對標(biāo),需要在動力總成臺架模擬一輛真實(shí)的整車及其行駛的環(huán)境。為此接下來需要真實(shí)模擬整車在道路上的行駛阻力、車輛駕駛員、整車Power-mode冷起動功能(BAT、ACC、Ignition、Crank/Run功能)、整車自動起停功能、整車電子加速踏板、制動踏板、空調(diào)負(fù)載等整車功能。
基于此我們設(shè)計了如圖1所示的臺架系統(tǒng),該系統(tǒng)包含設(shè)備連接方式、采樣系統(tǒng)、被測樣機(jī)組成、主控軟件、CAN總線信號模擬、硬線信號模擬及整車功能塊模擬。

2整車模擬
2.1整車行駛阻力模擬
車輛正常行駛在道路上所受的阻力有:空氣阻力、滾動阻力、加速阻力及坡道阻力。加速阻力僅在車輛車速變化時產(chǎn)生,因此行駛車輛的阻力公式為:
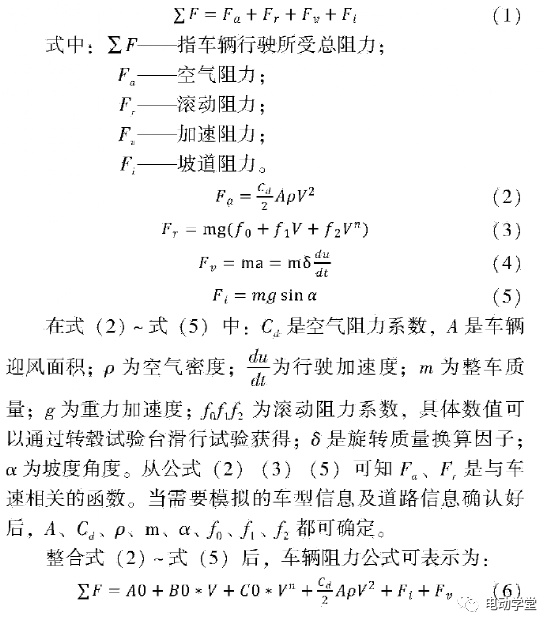
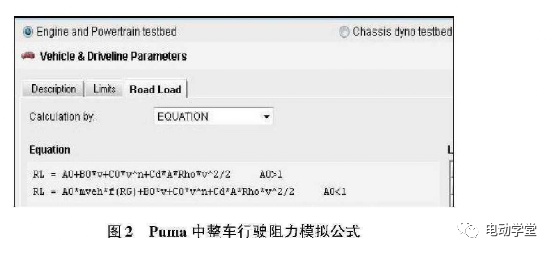
其中FvFi寸,在車速及坡度變化時,Puma可以根據(jù)坡度、整車質(zhì)量及各個轉(zhuǎn)動慣量經(jīng)過計算后施加在測功機(jī)上??諝庾枇皾L動阻力在Puma軟件中模擬如圖2所示。
2.2整車模型模擬
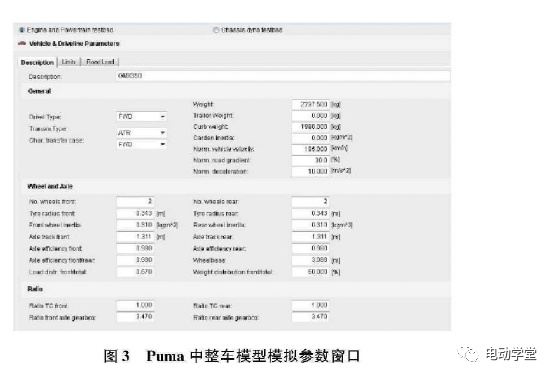
Puma軟件有整車模型模擬功能,可以在參數(shù)配置模塊輸入驅(qū)動類型(前驅(qū)/后驅(qū)/四驅(qū))、變速器類型、車重、輪胎數(shù)量、前后輪胎半徑及轉(zhuǎn)動慣量、主減速比等整車信息,具體如圖3所示。
2.3駕駛員模擬
Puma具備駕駛員模擬功能,主要包括踩油門、踩制動踏板、換檔等功能。
2.3.1加速踏板功能模擬
此次設(shè)計的臺架不帶真實(shí)加速踏板,需根據(jù)加速踏板特性進(jìn)行信號模擬。整車加速踏板在駕駛員踩加速踏板時會往總線發(fā)送高低兩路電壓信號,且高低兩路電壓數(shù)值成2倍關(guān)系,其中低路電壓為0.25~2.2V,高路電壓為0.5~4.4V。
為此在臺架數(shù)采系統(tǒng)AO(An alog Out)模塊設(shè)置高低路電壓輸出通道,分別線性對應(yīng)加速踏板0-100%開度,同時通過硬線與線束上對應(yīng)的PIN腳連接。當(dāng)Puma進(jìn)行車速PIO閉環(huán)控制時會根據(jù)所需的節(jié)氣門開度向?qū)?yīng)PIN輸出所需的電壓。
2.3.2制動踏板功能模擬
該臺架不帶真實(shí)制動踏板,需根據(jù)制動踏板的物理特性進(jìn)行信號模擬。當(dāng)制動制動時,制動標(biāo)志位對應(yīng)的線束PIN腳信號會從0V變?yōu)?2V,制動踏板會向總線發(fā)送0~5V范圍內(nèi)的電壓信號,電壓值與制動踏板開度正相關(guān)。為此在Puma中編輯式(7)模擬踏板制動輸出電壓:

將制動標(biāo)志位及踏板百分比對應(yīng)的輸出電壓,關(guān)聯(lián)到臺架數(shù)采系統(tǒng),AO模塊通過硬線連接到總線相應(yīng)PIN腳。當(dāng)需要模擬實(shí)車制動制動時會根據(jù)所需踏板開度向?qū)?yīng)PIN腳輸出對應(yīng)電壓。
此外,通過Puma將制動標(biāo)志位及制動踏板開度以CAN信號形式發(fā)送給Canoe,Canoe再模擬制動狀態(tài)報文所包含的其他信息到總線上。
2.3.3電子掛檔功能模擬
由于被測件帶電子掛檔功能,需在臺架實(shí)現(xiàn)電子掛檔功能模擬。主要是通過Puma系統(tǒng)發(fā)送換檔指令,利用CANOE腳本將指令轉(zhuǎn)換為TCM可識別的總線信號實(shí)現(xiàn)電子掛檔功能。
2.3.4車速PID控制
Puma會實(shí)時對比目標(biāo)車速與實(shí)際車速的偏差通過PID調(diào)節(jié)電子節(jié)氣門開度及制動強(qiáng)度以確保實(shí)際車速與目標(biāo)車速保持一致。電子節(jié)氣門PID控制邏輯見圖4,制動控制邏輯見圖5。

2.4整車功能模擬
2.4.1冷起動功能模擬
為實(shí)現(xiàn)冷起動功能,將線束PIN腳更改后Puma模擬Powennode對應(yīng)的BAT、ACC、IGN、Run狀態(tài),并通過CAN信號將對應(yīng)的標(biāo)志值發(fā)給Canoe,Canoe模擬BCM功能將信號發(fā)到總線上,模擬KeyStmi冷起動數(shù)據(jù)見圖6。
2.4.2自動起停功能模擬
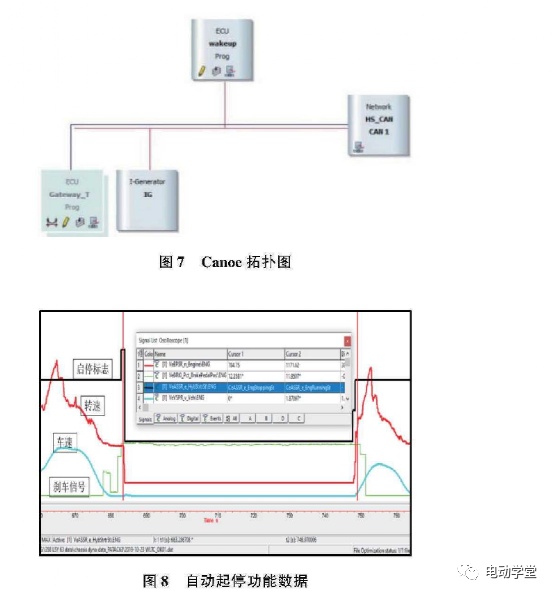
對于自動起停功能模擬,由于臺架不帶BCM,需要先通過Canoe模擬BCM的總線喚醒功能,并根據(jù)自動起??刂七壿嫞M前艙蓋開關(guān)量等信號,同時通過INCA更改標(biāo)定,屏蔽整車非必要起停條件,Canoe的拓?fù)浣Y(jié)構(gòu)如圖7。ECM會根據(jù)總線上的BSG電機(jī)功率、48VSOC狀態(tài)、12V蓄電池電壓狀態(tài)及制動狀態(tài)等信號控制自動起停,功能實(shí)現(xiàn)見圖8。
2.4.3空調(diào)負(fù)載模擬
為確保臺架模擬整車WLTC排放結(jié)果與實(shí)車一致性,需模擬空調(diào)負(fù)載。臺架通過DO(開關(guān)量數(shù)字輸出信號)模塊模擬空調(diào)的開關(guān)狀態(tài),通過AO模塊模擬不同工況下空調(diào)壓力傳感器電壓信號,輸出到線束對應(yīng)PIN腳并通過Canoe模擬相關(guān)總線信號。最后,在Puma中模擬空調(diào)工作產(chǎn)生的負(fù)載轉(zhuǎn)矩并施加到測功機(jī)上。
3軟件功能調(diào)試及HCU混動標(biāo)定開發(fā)
實(shí)現(xiàn)整車行駛阻力、整車模型、駕駛員特性、整車功能模擬后,在臺架進(jìn)行coastdown滑行試驗,與實(shí)車滑行曲線擬合修正AO、BO、CO系數(shù)。
修正AO、BO、co系數(shù)后臺架滑行試驗數(shù)據(jù)如圖9所示,圖中縱坐標(biāo)黑線為車速,紅線為對應(yīng)的道路阻力,橫坐標(biāo)為時間。核對臺架與實(shí)車車速-時間滑行仙線一致后完成軟件功能調(diào)試,包含ECM、TCM、BMS、APM、BSG的軟件功能調(diào)試,確保各控制器功能正常。同時完成了HCU混動功能標(biāo)定開發(fā),包含換檔控制、智能充電(圖10)、智能放電(圖11)、怠速充電、電壓控制、轉(zhuǎn)矩輔助、DFCO減速斷油、自動起停控制(圖8)、48V系統(tǒng)電量平衡、制動能量回收、48V系統(tǒng)繼電器控制等混動功能標(biāo)定開發(fā)。
4整車WLTC排放對標(biāo)
4.1WLTC循環(huán)PID調(diào)試
在臺架進(jìn)行排放開發(fā),首先要實(shí)現(xiàn)排放循環(huán)工況模擬,現(xiàn)行國六法規(guī)采用WLTC循環(huán),其較NEDC循環(huán)里程長,交變工況多,提高臺架和轉(zhuǎn)載實(shí)車WLTC循環(huán)發(fā)動機(jī)工況一致性是臺架模擬整車進(jìn)行排放開發(fā)的首要任務(wù)。
在Puma中完成WLTC循環(huán)自動運(yùn)行腳本編寫并成功驗證整車滑行曲線后,進(jìn)行WLTC循環(huán)PID調(diào)試,優(yōu)化車速跟隨性效果。為確保臺架運(yùn)行WLTC循環(huán)尾氣排放結(jié)果與轉(zhuǎn)載對標(biāo)一致性,整個WLTC循環(huán)下臺架和轉(zhuǎn)載對應(yīng)的發(fā)動機(jī)工況需高度一致,因此臺架的駕駛員特性模擬需與真實(shí)駕駛員具有高度相似的控制行為。一般情況下,在變工況時PID控制器相比真實(shí)駕駛員節(jié)氣門動作較大且持續(xù)時間較短,容易導(dǎo)致變速器檔位變化和轉(zhuǎn)載臺架具有較大的差異。這種情況下需要對PID控制器進(jìn)行細(xì)調(diào),為此我們創(chuàng)新性地將整個WLTC循環(huán)車速范圍細(xì)分為5個區(qū)間,并為每段車速區(qū)間配置精細(xì)PID控制參數(shù)。
PID調(diào)試后臺架與實(shí)車轉(zhuǎn)載WLTC循環(huán)下的整車、發(fā)動機(jī)及變速器工況對比數(shù)據(jù)見圖12。其中第一行為變速器檔位對比,第二行為發(fā)動機(jī)轉(zhuǎn)速對比,第三行為WLTC循環(huán)車速對比,從圖中可以看出,臺架與轉(zhuǎn)載實(shí)車WLTC循環(huán)的車速一致性大于95%且都符合法規(guī)要求、發(fā)動機(jī)轉(zhuǎn)速及變速器檔位變化一致性高。
4.2水、機(jī)油、催化器溫度一致性控制
臺架對比實(shí)車沒有發(fā)動機(jī)倉對催化器保溫功能,這會影響催化器起燃效果,且臺架所處環(huán)境與整車不同,發(fā)動機(jī)及變速器與周圍環(huán)境熱交換速率不同。因此臺架模擬整車排放開發(fā)需要確保被測樣機(jī)冷卻液溫度、機(jī)油溫度、催化器溫度與整車保持一致?;谠撃繕?biāo),本文作者使用外部溫控設(shè)備對發(fā)動機(jī)冷卻液、發(fā)動機(jī)機(jī)油、變速器油進(jìn)行PIO閉環(huán)溫控調(diào)節(jié)。在WLTC第一個階段,對發(fā)動機(jī)冷卻液進(jìn)行加熱,保證溫度上升與整車一致,完全熱機(jī)后,在后續(xù)三個階段切入內(nèi)循環(huán)完全由ECU進(jìn)行ATM(自動溫控管理系統(tǒng))控制。臺架與整車轉(zhuǎn)骰溫控結(jié)果對比見圖13,一致性高于90%,圖中第一行為發(fā)動機(jī)機(jī)油溫度對比曲線,第二行為變速器油溫對比曲線、第三行為發(fā)動機(jī)冷卻液溫度對比曲線,第四行為WLTC循環(huán)車速對比曲線。
同時在催化器外部包裹保溫材料后催化器入口溫度及中心溫度和整車一致性大于90%,如圖14所示。圖中第一行曲線為催化器中心溫度對比,第二行為催化器入口處溫度對比,第三行為WLTC循環(huán)車速對比。

4.3WLTC排放結(jié)果對標(biāo)
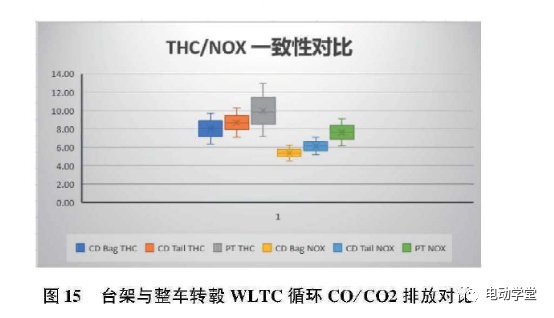
在確認(rèn)WLTC循環(huán)發(fā)動機(jī)工況、催化器溫度、變速器油溫、冷卻液及機(jī)油溫度臺架與整車一致后,我們對臺架與實(shí)車轉(zhuǎn)載多次重復(fù)WLTC排放結(jié)果對比。CO和CO2排放一致性大于90%(圖15),由于熱機(jī)和起燃階段臺架排溫稍低,THC和NOX一致性大于80%,臺架略高于整車(圖16)。圖中CDBag為轉(zhuǎn)載袋采排放結(jié)果,CD Tail為轉(zhuǎn)載直采排放結(jié)果,門為臺架排放結(jié)果,后續(xù)研究將繼續(xù)優(yōu)化臺架熱機(jī)和起燃階段的排溫保溫方案。
5結(jié)論
本文詳細(xì)闡述了在某48V微混車型早期工程樣車造車階段之前,通過臺架模擬整車道路負(fù)載、整車參數(shù)模型、整車功能(電子節(jié)氣門/制動踏板/冷起動/自動起停/電子掛檔等)、駕駛員特性等技術(shù)手段取得如下成果:
l)在動力總成臺架完成各控制器軟件功能調(diào)試、HCU混動功能標(biāo)定開發(fā)(如換檔控制、智能充放電、自動起??刂?、扭矩輔助、制動能量回收)等常規(guī)依賴實(shí)車進(jìn)行的整車開發(fā)工作。
2)臺架WLTC循環(huán)與整車轉(zhuǎn)載對標(biāo)車速一致性大于95%且都滿足法規(guī)要求,發(fā)動機(jī)轉(zhuǎn)速及變速器檔位變化一致性高,co、CO2排放一致性大于90%,THC、NO,一致性大于80%。
3)充分驗證了動力總成臺架模擬整車開發(fā)應(yīng)用研究的可行性,使得部分依賴早期工程樣車所進(jìn)行的整車開發(fā)工作能夠前置,可以提高整車開發(fā)效率、縮短整車開發(fā)周期,節(jié)省部分整車開發(fā)費(fèi)用。
4)該應(yīng)用研究具有可推廣性,并能起到一定的技術(shù)借鑒意義。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
