




 廣告
廣告





















































混合自治交通流中的交通信號(hào)配時(shí)與軌跡優(yōu)化
2021-12-07 20:35:08· 來源:同濟(jì)智能汽車研究所

編者按:信號(hào)配時(shí)和軌跡優(yōu)化(STTO)問題非常復(fù)雜,需要開發(fā)算法。以前的研究表明,在計(jì)算效率和解決方案性能之間存在一種權(quán)衡,其中更高效的算法與更簡(jiǎn)化的假設(shè)
編者按:信號(hào)配時(shí)和軌跡優(yōu)化(STTO)問題非常復(fù)雜,需要開發(fā)算法。以前的研究表明,在計(jì)算效率和解決方案性能之間存在一種權(quán)衡,其中更高效的算法與更簡(jiǎn)化的假設(shè)相關(guān)。本文的貢獻(xiàn)有三個(gè)方面:1)本研究引入了一種解決方案技術(shù),它在計(jì)算效率和解決方案性能之間提供了平衡:它在不顯著犧牲解決方案性能的情況下降低了STTO的計(jì)算復(fù)雜性。作者通過使用拉格朗日松弛法將STTO問題分解為多個(gè)車道級(jí)優(yōu)化子問題,開發(fā)有效的解決方案實(shí)現(xiàn)了這一平衡。因此,可以分析不同布局和不同需求水平的交叉口;2) 作者縮小了拉格朗日松弛法的最優(yōu)性差距,使其找到的解接近最優(yōu)解。改進(jìn)了拉格朗日松弛法在求解STTO問題時(shí)的收斂性,保證了在減少對(duì)偶間隙的情況下有效地找到近似最優(yōu)解;3)所提出的算法不需要以下簡(jiǎn)化假設(shè):a)所有自動(dòng)化車輛的車隊(duì),b)強(qiáng)制車輛排成一列移動(dòng),c)以所需速度到達(dá)交叉口d)紅色相位期間交叉口不存在初始隊(duì)列。因此,可以在具有不同CAV市場(chǎng)滲透率的混合自治環(huán)境中研究CAV聯(lián)合信號(hào)配時(shí)和軌跡優(yōu)化的效果。仿真結(jié)果表明,該方法具有較高計(jì)算效率和更好的性能。
本文譯自:
《TrafficSignal Timing and Trajectory Optimization in a Mixed Autonomy Traffic Stream》
文章來源:
IEEE Transactions on Intelligent Transportation Systems, 2021
作者:
Mehrdad Tajalli,Ali Hajbabaie
原文鏈接:
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9357468
摘要:本研究介紹了一種在網(wǎng)聯(lián)自動(dòng)駕駛車輛(CAVs)和人駕駛車輛(HVs)混合的交叉口信號(hào)配時(shí)和軌跡優(yōu)化方法。我們將把信號(hào)配時(shí)和軌跡控制聯(lián)合表示為一個(gè)計(jì)算復(fù)雜的混合整數(shù)非線性規(guī)劃問題。所開發(fā)的方法通過(a)將非線性約束線性化,并用混合整數(shù)解的緊凸殼重新表述問題;(b)將交叉口級(jí)別方案分解為多個(gè)車道級(jí)別方案,從而在計(jì)算效率和解決方案質(zhì)量之間取得平衡。因此,每個(gè)單獨(dú)的控制器聯(lián)合優(yōu)化車道上CAVs的軌跡以及與該車道相關(guān)的信號(hào)配時(shí)參數(shù)。此設(shè)置將允許為具有不同需求級(jí)別的復(fù)雜交叉口找到具有較小對(duì)偶間隙的近似最優(yōu)解決方案。案例研究結(jié)果表明,該方法在不超過0.1%的對(duì)偶間隙下能有效地找到問題的解。我們將開發(fā)的方法與現(xiàn)有的信號(hào)配時(shí)和軌跡控制方法進(jìn)行了比較,發(fā)現(xiàn)在不同情況下,平均行程時(shí)間減少了13%至41%,燃油消耗量減少了1%至31%。
關(guān)鍵詞:信號(hào)配時(shí)與軌跡優(yōu)化(STTO),網(wǎng)聯(lián)自動(dòng)駕駛車輛(CAV),人駕駛車輛(HV),拉格朗日松弛原理(LR),混合整數(shù)非線性規(guī)劃(MINLP)
1 引言
最近的研究表明,網(wǎng)聯(lián)自動(dòng)駕駛車輛(CAVs)的軌跡優(yōu)化和交叉口信號(hào)燈配時(shí)優(yōu)化可以明顯改善交通運(yùn)行[1]-[5]。CAVs的軌跡和信號(hào)配時(shí)優(yōu)化有助于更準(zhǔn)確地規(guī)劃車輛到達(dá)交叉口的時(shí)間,以更有效地利用綠燈持續(xù)時(shí)間。因此,交叉口的停車次數(shù)、車輛油耗和行駛延誤將顯著減少。然而,信號(hào)控制器和接近車輛之間的合作需要大量的通信和計(jì)算能力[6]。信號(hào)控制器不可能處理所有需要的計(jì)算。事實(shí)上,以前的研究表明信號(hào)配時(shí)和軌跡優(yōu)化的有效性在如下幾種情況:a)在布局簡(jiǎn)單的交叉口(例如,單行道[2],[7]或無轉(zhuǎn)彎運(yùn)動(dòng)[8]),(b)在低交通量[2],[7]-[9]下,或(c)使用簡(jiǎn)化或限制性假設(shè)(例如,使用一階交通流模型來更新CAVs的軌跡 [4]、[10]或優(yōu)化部分CAVs的軌跡 [1])。近似方法和啟發(fā)式算法也用于解決更復(fù)雜條件下的問題;然而,確以犧牲解決方案的性能為代價(jià)[11],[12]。
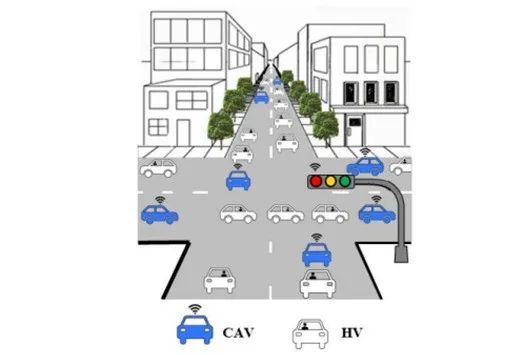
圖1 與CAV和HV交互的信號(hào)控制器
本文提出了一種在信號(hào)交叉口進(jìn)行CAVs軌跡優(yōu)化和信號(hào)配時(shí)優(yōu)化聯(lián)合的方法,該方法在計(jì)算效率和解決方案性能之間取得了平衡。如圖1所示,該方法設(shè)計(jì)用于CAVs和HVs的混合交通流,其中CAV的移動(dòng)由中央控制,并通過信號(hào)交叉口的車輛到基礎(chǔ)設(shè)施通信系統(tǒng)與之通信。該方法要求已知交叉口附近所有車輛(CAV和HVs)的初始位置和速度,并使用跟車概念預(yù)測(cè)規(guī)劃范圍內(nèi)HVs的位置。HVs的運(yùn)動(dòng)沒有得到優(yōu)化。我們假設(shè)所有車輛都連接在一起(只是為了收集車輛位置和速度),或者交叉口配備了能夠提供車輛位置和速度的探測(cè)器(例如雷達(dá)裝置或攝像機(jī))。請(qǐng)注意,如果HVs不向信號(hào)控制器發(fā)送信息,只要檢測(cè)器可用于收集所需數(shù)據(jù),建議的算法就可以工作。本研究將聯(lián)合優(yōu)化描述為一個(gè)混合整數(shù)非線性規(guī)劃問題,其目標(biāo)是減少交叉口處車輛的總行程時(shí)間和車輛間速度差異。決策變量是CAVs的加速率和信號(hào)定時(shí)參數(shù)。采用由Helly開發(fā)的線性跟馳模型將HVs和CAVs之間的相互作用納入優(yōu)化問題[13]。我們修改了線性模型,通過加入信號(hào)定時(shí)參數(shù)使其對(duì)交通信號(hào)燈做出響應(yīng)。信號(hào)定時(shí)參數(shù)通過無周期和無相位計(jì)劃進(jìn)行優(yōu)化,該計(jì)劃除黃色時(shí)間間隔外,還滿足最小和最大綠色時(shí)間約束。信號(hào)配時(shí)和軌跡優(yōu)化(STTO)問題非常復(fù)雜,尤其是在有人駕駛車輛的情況下,需要開發(fā)計(jì)算效率高的算法來找到近似最優(yōu)解。以前的研究表明,在計(jì)算效率和結(jié)果的最優(yōu)性之間存在著平衡關(guān)系。本研究引入了一種解決方案,利用拉格朗日松弛技術(shù)將交叉口信號(hào)配時(shí)和軌跡優(yōu)化問題分解為幾個(gè)車道級(jí)優(yōu)化子問題,從而降低STTO問題的復(fù)雜性,其中,控制器分別優(yōu)化交叉口每條車道上的信號(hào)配時(shí)參數(shù)和CAVs的軌跡。因此,STTO可以擴(kuò)展到具有高需求水平的更復(fù)雜交叉口布局。此外,還提出了一種用于收緊混合整數(shù)可行域凸包的基于交叉口沖突域圖的最大團(tuán)集的問題重新表述方法,提高拉格朗日松弛技術(shù)的收斂性,從而減小最優(yōu)性差距。通過交叉口所有控制器之間的協(xié)商過程,找到接近最優(yōu)的交叉口信號(hào)配時(shí)參數(shù)和CAVs軌跡。此外,我們提出了一個(gè)簡(jiǎn)單的優(yōu)化問題,為信號(hào)配時(shí)計(jì)劃提供了一個(gè)可行的解決方案。因此,在沒有上述限制性假設(shè)的情況下,找到可行且高質(zhì)量的解決方案是可能的。
在本文的剩余部分,將回顧相關(guān)文獻(xiàn),接下來將討論問題公式。然后,詳細(xì)介紹了求解技術(shù),包括問題的重新表述和拉格朗日松弛技術(shù)。接下來將提供將所提出的算法應(yīng)用于案例研究的結(jié)果,最后給出結(jié)論。
2 背景
A.交叉口的軌跡規(guī)劃
利用先進(jìn)的信號(hào)相位和配時(shí)(SPaT)信息優(yōu)化信號(hào)交叉口的CAVs軌跡,可提高交通安全性、機(jī)動(dòng)性和燃油消耗率[14]–[17]。美國(guó)國(guó)家公路交通安全管理局(NHTSA)報(bào)告稱,SPaT廣播能夠?qū)㈥J紅燈次數(shù)和能耗分別減少90%和35%[18]。此外,可以規(guī)劃車輛軌跡,以避免在交叉口停車并最大限度地減少燃油消耗。Xiaet al.[19]表明,通過在固定時(shí)間信號(hào)交叉口進(jìn)行建議速度系統(tǒng)試驗(yàn),可以降低14%的油耗。Weiet al.[20]表明,優(yōu)化接近信號(hào)交叉口的排中領(lǐng)先車輛的軌跡可以有效地管理交通擁堵并增加交叉口的通行能力。當(dāng)所有車輛都是自動(dòng)駕駛車輛時(shí),在無信號(hào)交叉口控制CAVs的軌跡,可提供機(jī)會(huì)實(shí)現(xiàn)交叉口的最高通行能力,同時(shí)通過防止車輛之間的碰撞來保持安全[21]–[24]。例如,Mirheliet等人[25]表明,與優(yōu)化的全驅(qū)動(dòng)信號(hào)定時(shí)計(jì)劃相比,在無信號(hào)交叉口100%CAVs的總行程時(shí)間減少到70.5%。
B.軌跡和信號(hào)配時(shí)優(yōu)化
Liet al.[7]提出單行道交叉口上CAVs的信號(hào)配時(shí)和軌跡優(yōu)化方案,假設(shè)所有車輛完全連接,并將遵循指定的最佳軌跡。他們列舉了所有可能的信號(hào)定時(shí)計(jì)劃和每個(gè)CAVs的優(yōu)化軌跡,目標(biāo)是最小化平均延誤。他們提出的方法與優(yōu)化的全驅(qū)動(dòng)信號(hào)定時(shí)計(jì)劃相比將平均延誤減少到36.9%,并將吞吐量提高到20.2%。由于需要列舉所有可能的信號(hào)配時(shí)計(jì)劃,該方法不適用于更復(fù)雜的交叉口。Junget al.[8]開發(fā)了一個(gè)雙層優(yōu)化方法,用于在一個(gè)簡(jiǎn)單的十字交叉口(每個(gè)方向只有一條直達(dá)路段,交通流中只有CAVs)處查找交通信號(hào)定時(shí)參數(shù)和CAVs軌跡?;谲囕v到達(dá)交叉口的估計(jì)時(shí)間,窮舉搜索法在上層找到了最低交叉口延誤。然后,遺傳算法在下層確定以最小化總油耗為目標(biāo)的CAVs的軌跡。通過這項(xiàng)研究,車輛行駛時(shí)間和燃油消耗量分別減少了12%和10%。窮舉搜索和遺傳算法的結(jié)合可能不足以有效地解決復(fù)雜的優(yōu)化問題。類似地,Yangetal.[2]使用分支定界技術(shù)在具有兩條單向街道的隔離交叉口處尋找信號(hào)配時(shí)參數(shù)。本研究考慮了三種類型的車輛,包括具有不同市場(chǎng)滲透率的傳統(tǒng)車輛、網(wǎng)聯(lián)人工駕駛車輛以及網(wǎng)聯(lián)自動(dòng)化車輛。在上層,根據(jù)估計(jì)的車輛到達(dá)時(shí)間最小化交叉口總延誤。針對(duì)每個(gè)信號(hào)配時(shí)計(jì)劃,在下層問題中對(duì)CAVs的軌跡進(jìn)行了優(yōu)化,以最大化其進(jìn)入交叉口的速度。本研究假設(shè)每個(gè)排長(zhǎng)都是CAVs,排長(zhǎng)總是在綠色信號(hào)燈未亮?xí)r到達(dá)交叉口。對(duì)于交通量大的復(fù)雜交叉口,該算法可能效率不高,因?yàn)樾枰槍?duì)分支定界算法確定的每一組信號(hào)配時(shí)參數(shù)對(duì)軌跡進(jìn)行優(yōu)化。Xuet al.[9]開發(fā)了一個(gè)雙層優(yōu)化方法,以最小化上層的總行駛時(shí)間,并最小化下層每輛車的燃油消耗。通過枚舉找到信號(hào)配時(shí)計(jì)劃。然后,通過使用插值多項(xiàng)式函數(shù)逼近狀態(tài)變量和控制變量,找到每個(gè)方案的最優(yōu)車輛軌跡。Pourmehrabet al.[26]提出了一種基于車輛到達(dá)時(shí)間調(diào)整現(xiàn)有信號(hào)配時(shí)計(jì)劃的方法,以最大限度地利用綠燈時(shí)間。此外,對(duì)領(lǐng)隊(duì)自動(dòng)駕駛車輛的行駛軌跡進(jìn)行優(yōu)化,以最大限度地減少行程時(shí)間延遲。然而,本研究主要關(guān)注信號(hào)配時(shí)計(jì)劃的可行性,而不是其最優(yōu)性(根據(jù)一組定義的規(guī)則調(diào)整信號(hào)配時(shí)參數(shù),以找到與優(yōu)化軌跡的可行協(xié)調(diào))。信號(hào)定時(shí)控制策略是將信號(hào)延長(zhǎng)或反復(fù)切換到另一個(gè)相位,直到找到一個(gè)能提供綠燈到達(dá)的組合。相比之下,我們提出的方法聯(lián)合優(yōu)化信號(hào)配時(shí)參數(shù)和車輛軌跡,從而提高交通運(yùn)行效率。當(dāng)交叉口布局復(fù)雜、相位數(shù)量增加或需求水平較高時(shí),如先前研究中所述的枚舉方法變得無效。因此,一些研究提出了啟發(fā)式方法或考慮簡(jiǎn)化假設(shè),以有效地解決信號(hào)配時(shí)和軌跡優(yōu)化問題。例如,F(xiàn)eng et al.[27]開發(fā)了一種信號(hào)配時(shí)和排隊(duì)CAVs軌跡的聯(lián)合優(yōu)化方法。他們將信號(hào)相位分為幾個(gè)階段,并使用動(dòng)態(tài)規(guī)劃方法來找到每個(gè)階段的信號(hào)配時(shí)參數(shù)。該方法假設(shè)排長(zhǎng)恰好在綠燈時(shí)間間隔開始時(shí)到達(dá)交叉口停車線,可以解析地找到最優(yōu)解。然而,這種假設(shè)可能會(huì)限制動(dòng)態(tài)規(guī)劃框架中信號(hào)配時(shí)計(jì)劃的選擇,特別是當(dāng)排長(zhǎng)不是CAVs時(shí)。此外,由于研究顯示了交通量非常低的簡(jiǎn)單場(chǎng)景的性能結(jié)果,因此建議的方法對(duì)高交通量的有效性尚不清楚。研究結(jié)果表明,排長(zhǎng)對(duì)信號(hào)配時(shí)和軌跡的聯(lián)合優(yōu)化可將車輛延誤和二氧化碳排放分別減少24%和13.8%。Guo等人[3]提出了一種兩步優(yōu)化信號(hào)配時(shí)和CAVs軌跡的方法。在第一步中,找到了使交叉口延誤最小化的信號(hào)配時(shí)參數(shù)。在第二步中,為計(jì)劃的信號(hào)定時(shí)設(shè)計(jì)了最佳軌跡。通過動(dòng)態(tài)規(guī)劃找到信號(hào)配時(shí)參數(shù),并通過射擊啟發(fā)式迭代評(píng)估每個(gè)信號(hào)配時(shí)計(jì)劃對(duì)軌跡的影響。射擊啟發(fā)式被證明可以估計(jì)CAVs的高性能軌跡。然而,這種方法的可行性僅限于路段長(zhǎng)度足以讓車輛選擇適當(dāng)機(jī)動(dòng)的交叉口。此外,交叉口長(zhǎng)隊(duì)的存在會(huì)導(dǎo)致通過射擊啟發(fā)式尋找不可行解。Yuet等人[1]優(yōu)化了信號(hào)配時(shí)參數(shù),如相序、綠燈啟動(dòng)時(shí)間、每個(gè)相位的持續(xù)時(shí)間以及隔離交叉口的周期長(zhǎng)度。此外,他們還優(yōu)化了車輛到達(dá)時(shí)間,以及在具有直行、右轉(zhuǎn)和左轉(zhuǎn)運(yùn)動(dòng)的十字交叉口中的換道策略。本研究利用規(guī)劃地平線程序來解決混合整數(shù)線性規(guī)劃(MILP)問題。然而,它假設(shè)(1)所有車輛都是CAVs,(2)在同一周期內(nèi)通過交叉口的同一車道上的車輛都在同一排。因此,他們只優(yōu)化了領(lǐng)頭車輛的軌跡(到達(dá)時(shí)間),其他跟隨車輛使用跟車模型跟隨領(lǐng)頭車輛。此外,他們假設(shè)所有車輛以期望的速度到達(dá)交叉口,且交叉口不存在排隊(duì)。這些假設(shè)限制了該方法在低CAVs市場(chǎng)滲透率水平上的應(yīng)用。Liet al.[28]結(jié)合具有多個(gè)交叉口的主干道的信號(hào)配時(shí)計(jì)劃,優(yōu)化電動(dòng)車輛的軌跡。本研究的目的是通過優(yōu)化信號(hào)配時(shí)來最小化交通延誤,并通過優(yōu)化電動(dòng)汽車的軌跡來節(jié)約能源。為了解決這一復(fù)雜的優(yōu)化問題,采用了遺傳算法和粒子群算法相結(jié)合的混合啟發(fā)式技術(shù)來生成可行的信號(hào)配時(shí)計(jì)劃,從而評(píng)估該信號(hào)的最優(yōu)軌跡。該研究通過從每個(gè)車輛的角度考慮最優(yōu)軌跡,而不考慮車輛之間的協(xié)調(diào),從而降低了問題的復(fù)雜性。因此,該解決方案可能無法提高系統(tǒng)級(jí)性能。Li和Zhou[4]優(yōu)化了CAVs在與人駕駛車輛混合環(huán)境中的信號(hào)配時(shí)和軌跡。他們通過在相位時(shí)間交通超網(wǎng)絡(luò)中表示交通動(dòng)態(tài)和信號(hào)定時(shí)約束來降低問題的復(fù)雜性。然而,這種表示需要一階異構(gòu)流量模型。雖然他們提出的方法允許研究大規(guī)模網(wǎng)絡(luò),但其操作精度不如我們研究中使用跟車模型的模型精度高。當(dāng)考慮二階交通流或微觀跟馳模型時(shí),相位時(shí)間交通超網(wǎng)絡(luò)方法的性能不明確,問題的復(fù)雜性將顯著增加。在一項(xiàng)類似的研究中,Liet al.[10]使用拉格朗日松弛技術(shù)來解決交通網(wǎng)絡(luò)中的信號(hào)定時(shí)和路由問題。拉格朗日松弛法用于松弛鏈路容量約束,并將優(yōu)化程序分解為路由引導(dǎo)和信號(hào)優(yōu)化子問題。然而,優(yōu)化車輛路徑不同于軌跡優(yōu)化,因?yàn)槁窂絻?yōu)化不會(huì)在短時(shí)間間隔內(nèi)控制車輛的位置。盡管拉格朗日松弛技術(shù)降低了所提出問題的復(fù)雜性,但本研究中報(bào)告的最優(yōu)性差距高達(dá)30%,這導(dǎo)致了次優(yōu)解。
3 問題表述
本研究協(xié)同優(yōu)化了所有CAVs的軌跡和信號(hào)配時(shí)參數(shù)。假設(shè)基礎(chǔ)設(shè)施通過雷達(dá)裝置、視頻探測(cè)器或連接性知道人類駕駛車輛的初始位置和速度。我們定義L為交叉口所有車道的集合,I為交叉口附近所有車輛的集合。此外,
、
和

分別表示表示車道
上所有車輛、CAVs和HVs的集合, 我們將

定義為與車道

沖突的所有車道的集合。圖2展示了孤立交叉點(diǎn)中的定義集。

圖2 STTO問題中定義的集合和參數(shù)
我們分別將

和

定義為信號(hào)配時(shí)和軌跡優(yōu)化時(shí)間步長(zhǎng)集。請(qǐng)注意,車輛軌跡和信號(hào)正時(shí)更新時(shí)間步長(zhǎng)(

和

)是不同的。軌跡更新的頻率高于信號(hào)配時(shí)參數(shù)更新的頻率,以考慮駕駛員行為的不確定性,并捕捉預(yù)測(cè)和實(shí)際車輛軌跡之間的任何差異。方程式(1)顯示了這兩個(gè)時(shí)間步之間的關(guān)系。

運(yùn)算符表示對(duì)其中相應(yīng)的參數(shù)進(jìn)行取整。

信號(hào)配時(shí)的狀態(tài)變量,包括在車道
上的綠燈時(shí)間

、黃燈時(shí)間

和時(shí)間步長(zhǎng)

,將根據(jù)在時(shí)間戳
時(shí)接近交叉口車道

的車輛

的位置
和速度

信息進(jìn)行優(yōu)化。車輛
在時(shí)間戳
的加速率

也是CAVs運(yùn)動(dòng)規(guī)劃中的控
制變量。表1提供問題表達(dá)中使用的變量、集合和參數(shù)的詳細(xì)定義。
表1 集合、決策變量和參數(shù)的定義

A. 目標(biāo)函數(shù)
STTO的目標(biāo)函數(shù)如(2)所示,
包含兩項(xiàng)第一項(xiàng)使每輛車距車道
起點(diǎn)的距離最大化,車輛
位于圖2所示位置[29],[30]。對(duì)于位于車道
的車輛
,位置權(quán)重因子

乘以目標(biāo)函數(shù)的第一項(xiàng),以避免不斷為需求較高的引道提供服務(wù),并防止交叉口次要方向的排隊(duì)。我們將該權(quán)重的值設(shè)置為每輛車進(jìn)入交叉口附近后經(jīng)歷的當(dāng)前延誤(即自由流行駛時(shí)間減去實(shí)際行駛時(shí)間)。因此,在經(jīng)歷較多延誤的車道上,車輛將被分配更高的優(yōu)先級(jí)。請(qǐng)注意,權(quán)重因子在規(guī)劃范圍內(nèi)是固定的。目標(biāo)函數(shù)的第二項(xiàng)通過最小化兩個(gè)連續(xù)時(shí)間步之間每個(gè)CAVs的速度差來平滑CAVs的運(yùn)動(dòng)。Tajalli和Hajbabaie[14]表明,將速度差降至最低會(huì)使交叉口的停車次數(shù)減少。權(quán)重因子
是優(yōu)化方案的輸入,以在目標(biāo)函數(shù)的兩項(xiàng)之間提供所需的平衡。β值越高,目標(biāo)函數(shù)的第一項(xiàng)優(yōu)先級(jí)越高,β值越低,目標(biāo)函數(shù)的第二項(xiàng)優(yōu)先級(jí)越高。
B. 約束
車輛的速度和位置根據(jù)基本運(yùn)動(dòng)方程更新,如約束條件(3)和(4)所示

1)車輛跟馳約束:
需要估計(jì)HVs的位置和速度,以優(yōu)化信號(hào)配時(shí)參數(shù)和CAVs的軌跡。因此,根據(jù)車輛跟馳行為預(yù)測(cè)HVs的未來軌跡。本研究考慮了Helly(1959)開發(fā)的線性跟馳模型。該跟馳模型用于建模自適應(yīng)和協(xié)作自適應(yīng)巡航控制系統(tǒng)[31],[32]。此外,Panwai和Dia(2005)表明Helly的跟馳模型與現(xiàn)實(shí)世界的交通數(shù)據(jù)具有適當(dāng)?shù)臄M合。雖然人類駕駛的本質(zhì)是隨機(jī)的,但確定性跟馳模型在我們的方法中適用,原因是車輛的初始位置每0.5s從網(wǎng)絡(luò)中觀察一次,這一部分將在方法學(xué)部分解釋。在此跟馳模型中,跟車者對(duì)相對(duì)速度和與前面車輛的距離做出響應(yīng),有關(guān)加速率的計(jì)算公式見公式(5)。參數(shù)α1和α2是固定的,具有正值,應(yīng)分別在[0.17,1.3]和[1/4α1,1/2α1]的范圍內(nèi)[34],[35]。
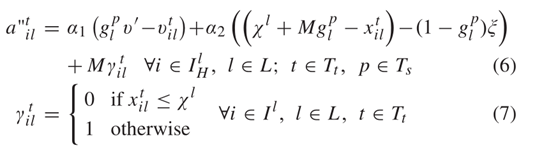
方程式(5)中的第一項(xiàng)考慮了領(lǐng)先和跟隨車輛之間的相對(duì)速度。正速度差(即先導(dǎo)以更高的速度行駛)導(dǎo)致從動(dòng)件的正加速度,而負(fù)速度差迫使從動(dòng)件減速。第二項(xiàng)考慮了連續(xù)車輛之間的相對(duì)距離。我們?cè)鰪?qiáng)了跟車模型,以考慮交通信號(hào),使車輛在接近紅色信號(hào)時(shí)減速。交通信號(hào)燈被視為一個(gè)虛擬車輛,停車桿處的速度為零(對(duì)于紅色信號(hào)燈),或交叉口處的最大速度(對(duì)于綠色信號(hào)燈)。方程式(6)顯示了接近停車桿時(shí)車輛加速度是如何更新的。請(qǐng)注意,當(dāng)信號(hào)為紅色,虛擬停止車輛位于交叉口停車桿處,車輛與交叉口停車桿之間應(yīng)有理想的安全距離ξ。但是,當(dāng)交通燈為綠色時(shí),前面虛擬車輛的位置將變?yōu)榕c后面車輛的距離較遠(yuǎn),并且與交叉口停車桿的期望安全距離將減小為零。此外,應(yīng)注意的是,僅當(dāng)車輛位于交叉口停車線之前時(shí),即

,才需要建立車輛和交通燈之間的連接。方程式(6)應(yīng)在CAV通過交叉口后變?yōu)榉腔顒?dòng)狀態(tài)。當(dāng)信號(hào)燈為綠色時(shí),將信號(hào)配時(shí)變量

與大系數(shù)M相乘。方程(6)的第二項(xiàng)將虛擬車輛移動(dòng)到距離后續(xù)車輛很遠(yuǎn)的位置。因此,車輛不再對(duì)其作出反應(yīng)。方程式(6)中引入的二進(jìn)制變量

,用于在交通燈和車輛通過交叉口停車線后
解除它們之間的聯(lián)系,當(dāng)車輛位于交叉口停車線上游時(shí)
變?yōu)榱?,?dāng)車輛通過交叉口停車線時(shí)
變?yōu)?。如方程(7)所示
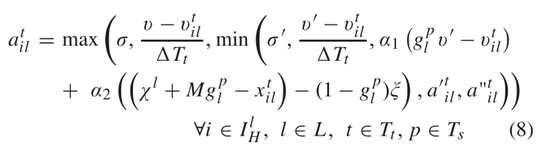
方程式(5)和(6)所示的線性跟馳模型不會(huì)將加速度和速度限制在最小值和最大值之間。因此,我們建立了基于最大-最小值函數(shù)的跟車模型,如等式(8)所示。該公式是所提出的跟馳模型的完整形式,該模型描述了諸如在自由流條件下移動(dòng)、在靜止和非靜止條件下跟隨其他車輛、接近慢速或靜止車輛以及紅色信號(hào)等情況。
2)CAV運(yùn)動(dòng)約束:
目標(biāo)函數(shù)(2)平滑CAVs的軌跡,以防止在交叉口頻繁停車。約束(9)確保CAV與前車之間的安全距離。兩輛連續(xù)車輛之間的距離是期望安全距離ξ、平均車輛長(zhǎng)度
和在后續(xù)車輛反應(yīng)時(shí)間內(nèi)可通過的距離
的函數(shù)。參數(shù)

表示CAVs的反應(yīng)時(shí)間。
當(dāng)信號(hào)燈不是綠色時(shí),約束(10)用于防止CAV進(jìn)入交叉口區(qū)域。當(dāng)CAV未到達(dá)交叉口且信號(hào)燈為紅色時(shí),車輛與交叉口停車線之間的距離應(yīng)大于或等于安全距離,如約束(10)所示。

約束條件(11)和(12)分別將CAVs的加速度和速度限制在允許范圍內(nèi)。

3)信號(hào)時(shí)長(zhǎng)約束:
假設(shè)信號(hào)定時(shí)是無周期和無相位的;但是,僅限于非沖突運(yùn)動(dòng)。例如,圖3顯示了北行和南行引道的所有允許移動(dòng)。我們假設(shè)直行和右轉(zhuǎn)可以在同一車道上行駛??紤]了幾個(gè)約束條件,以防止車輛在沖突運(yùn)動(dòng)中發(fā)生碰撞。
圖3 北向和南向通道的允許動(dòng)作
約束條件(13)確保在時(shí)間步長(zhǎng)

時(shí),沒有一對(duì)沖突的運(yùn)動(dòng)能夠接收到非紅色交通燈。

約束條件(14)確保分配給車道的綠燈時(shí)間小于或等于最大綠燈時(shí)間。約束條件(15)確保車道組的綠燈持續(xù)時(shí)間大于或等于最小綠燈時(shí)間。

約束(16)定義黃色時(shí)間的持續(xù)時(shí)間,約束(17)確保信號(hào)在綠色時(shí)間間隔結(jié)束時(shí)從綠色切換為黃色。參數(shù)y是黃色的時(shí)間間隔。約束(18)確保信號(hào)定時(shí)變量的完整性。

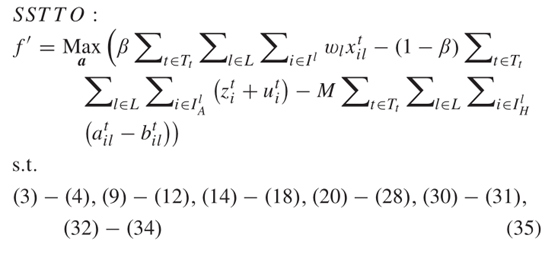
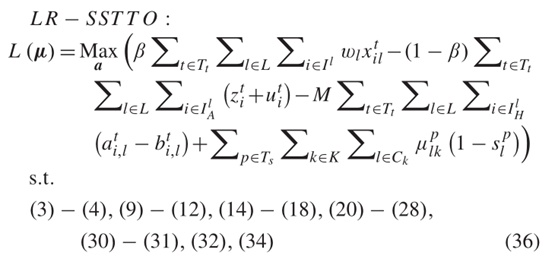
綜上所述,信號(hào)配時(shí)和軌跡優(yōu)化可以表示成如下形式
4 方法
該公式是一個(gè)混合整數(shù)非線性規(guī)劃。由于存在非線性約束和二元變量,該優(yōu)化程序難以有效求解。我們首先將目標(biāo)函數(shù)(2)、跟車模型(8)和條件約束線性化,以降低所提出公式的計(jì)算復(fù)雜性。我們使用拉格朗日松弛技術(shù)將交叉層問題分解為幾個(gè)車道級(jí)子問題,降低了計(jì)算復(fù)雜度,并且可以為每個(gè)問題分配一個(gè)控制器。控制器將通過共享拉格朗日因子,就信號(hào)定時(shí)參數(shù)和CAVs軌跡達(dá)成共識(shí),以確保在滿足沖突避免約束(13)時(shí)找到接近最優(yōu)的解決方案。
A. 線性化
目標(biāo)函數(shù)(2)的第二項(xiàng)包含一個(gè)絕對(duì)值函數(shù),它是凸但非線性的。我們?yōu)槊枯v車引入兩個(gè)輔助非負(fù)變量
和
使絕對(duì)值函數(shù)線性化。將約束(20)和(21)添加到原始問題中,以強(qiáng)制
和
的差值等于絕對(duì)值函數(shù)中的項(xiàng)。目標(biāo)函數(shù)(2)的線性形式如(19)所示,其中輔助變量之和最小化。

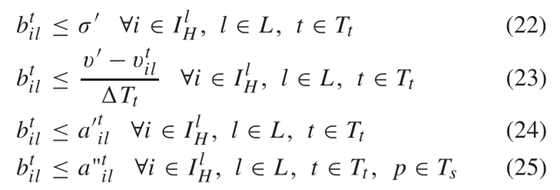
由于存在max-min函數(shù),約束(8)是非線性的。我們通過將等式約束轉(zhuǎn)化為幾個(gè)不等式,并在目標(biāo)函數(shù)中添加懲罰項(xiàng)來提供這些約束的線性形式。如約束(22)-(25)所示,約束(8)的最小部分由小于或等于的不等式表示
約束(26)-(27)解除函數(shù)(8)的最大部分,該部分由大于或等于不等式表示。約束條件(28)確保

大于或等于松弛最小值函數(shù)的

。
建議的線性化(22)-(28)是松散的,不能等價(jià)地表示(8)的最大-最小形式。為了解決這個(gè)問題,我們對(duì)
的非負(fù)差異在目標(biāo)函數(shù)中加大的懲罰系數(shù)M。新的目標(biāo)函數(shù)如(29)所示。

B. 拉格朗日松弛
前一節(jié)中描述的線性化技術(shù)將混合整數(shù)非線性問題(MINLP)轉(zhuǎn)化為混合整數(shù)線性問題(MILP)。雖然這種轉(zhuǎn)換降低了問題的復(fù)雜性,但整數(shù)信號(hào)定時(shí)和其他變量的存在使得問題仍然難以解決。我們開發(fā)了一種拉格朗日松弛技術(shù),該技術(shù)將問題分解為幾個(gè)車道級(jí)優(yōu)化子問題,其中,交叉口每個(gè)車道上的最佳信號(hào)配時(shí)和車輛軌跡分別并行求解。然而,拉格朗日松弛可能對(duì)MILP不具有強(qiáng)對(duì)偶性[36],[37]。因此,我們用一個(gè)優(yōu)越的解空間結(jié)構(gòu)來重新構(gòu)造問題,以克服這個(gè)問題。然后,引入一個(gè)簡(jiǎn)單的優(yōu)化問題,以確保信號(hào)配時(shí)計(jì)劃的可行解。

圖4 四通道的交叉口沖突圖,有通過和左轉(zhuǎn)的動(dòng)作
1)問題重新表述:
成對(duì)約束(13)是車道之間唯一常見的約束,可防止沖突運(yùn)動(dòng)同時(shí)接收非紅色燈信號(hào)。解除這些約束并使用拉格朗日因子將其添加到目標(biāo)函數(shù)中,將導(dǎo)致車道級(jí)別分解。拉格朗日松弛法為基于弱對(duì)偶理論的非凸信號(hào)配時(shí)和軌跡優(yōu)化問題的最優(yōu)解提供了一個(gè)上界。由于成對(duì)約束的弱結(jié)構(gòu),由成對(duì)約束提供的可行凸多面體具有非整數(shù)極值點(diǎn)[38]。換句話說,與成對(duì)約束相關(guān)的約束太多(13),因此在大多數(shù)情況下,連續(xù)線性松弛包含許多分?jǐn)?shù)[38]。因此,無法保證拉格朗日松弛收斂到具有非零對(duì)偶間隙的期望整數(shù)解[37]。找到定義整數(shù)解的凸包的超平面,除了滿足成對(duì)約束外,還有助于克服松弛后尋找不可行解的困難。
當(dāng)且僅當(dāng)一對(duì)二進(jìn)制節(jié)點(diǎn)中的兩個(gè)節(jié)點(diǎn)
不能同時(shí)選擇時(shí)(如兩個(gè)相互沖突的運(yùn)動(dòng)),成對(duì)沖突約束(13)可以由包含邊

的無向沖突圖

表示。換句話說,當(dāng)兩個(gè)二進(jìn)制節(jié)點(diǎn)中最多有一個(gè)的值是MILP的解時(shí),E是兩個(gè)二進(jìn)制節(jié)點(diǎn)之間的邊。圖4顯示了具有四個(gè)引道和八條車道的交叉口的沖突圖,其中包含直行和左轉(zhuǎn)運(yùn)動(dòng)。圖中的節(jié)點(diǎn)是與車道
相關(guān)聯(lián)的信號(hào)頭,每一條邊代表一對(duì)由(13)表示的成對(duì)沖突約束。
圖4所示的圖表示只有左轉(zhuǎn)運(yùn)動(dòng)和直行運(yùn)動(dòng)交叉口處的所有沖突,假設(shè)右轉(zhuǎn)運(yùn)動(dòng)與直行運(yùn)動(dòng)一起操作。成對(duì)沖突約束(13)是一組更強(qiáng)大的約束的特例,稱為派系[39]。派系是一組相互沖突的運(yùn)動(dòng),在這項(xiàng)研究中,最多有一個(gè)派系在同一時(shí)間可以收到非紅色信號(hào)。
我們定義
作為沖突圖G中相互連接的節(jié)點(diǎn)集,K是所有可能派系的集合,
代表集團(tuán)k的所有成員, 其中每個(gè)成員在圖G中相互連接,為了在k中設(shè)置
,要求所有潛在節(jié)點(diǎn)
可以通過圖G的邊相互連接,例如,

是圖4所示的交叉點(diǎn)的一個(gè)小團(tuán)體,因?yàn)?,6和7之間的運(yùn)動(dòng)中最多有一個(gè)可以得到非紅色信號(hào)。不同運(yùn)動(dòng)之間的多個(gè)成對(duì)約束(13)可以在一個(gè)派系中表示。因此,可以定義一組完整的派系約束,這些約束使用較少數(shù)量的約束施加所有邊限制。我們將最大派系定義為不能通過添加任何附加節(jié)點(diǎn)來擴(kuò)大的派系。我們定義
為綠燈
和黃燈
的總和。這是二進(jìn)制的,因?yàn)榫G色和黃色信號(hào)定時(shí)狀態(tài)中最多有一個(gè)值為1,請(qǐng)參見約束(32)-(34)。
只包括左轉(zhuǎn)運(yùn)動(dòng)的交叉口圖不能具有大于4的派系。因此,任何規(guī)模為4的派系都是最大派系。此外,可以確認(rèn)交叉口沖突圖中的最大派系保持所有必要的限制,以防止兩個(gè)沖突運(yùn)動(dòng)同時(shí)接收非紅色信號(hào)。此外,大小為4的最大系是成對(duì)約束(13)[40]中所有可行區(qū)域的凸包的面定義。因此,可行凸包被收緊,松弛約束的數(shù)量顯著減少。因此,在拉格朗日松弛問題中,對(duì)偶間隙減小。
2)簡(jiǎn)化STTO和相應(yīng)的對(duì)偶公式:
如前一節(jié)所述,將約束(13)替換為約束(32)-(34),以實(shí)現(xiàn)簡(jiǎn)化STTO(SSTTO),如下所示。
解除復(fù)雜約束(33)將SSTTO問題分解為車道級(jí)子問題。因此,拉格朗日問題是通過對(duì)偶派系約束(33)得到的,如下所示

是屬于派系
車道

的拉格朗日乘數(shù)因子,向量μ定義為所有拉格朗日乘數(shù)的向量。由于目標(biāo)函數(shù)和LR問題的剩余約束在車道上是可分離的,每個(gè)車道

的子問題當(dāng)雙乘因子μ已知時(shí),可單獨(dú)并行求解。對(duì)偶可行點(diǎn)μ處的對(duì)偶函數(shù)
的值始終是最優(yōu)值
的上界。因此,可以從對(duì)偶問題(37)的最優(yōu)值中找到最尖銳的上界,其定義為

.
根據(jù)對(duì)偶理論,對(duì)偶問題(37)總是凸的。換句話說,解決拉格朗日對(duì)偶問題(37)等價(jià)于最小化凸分段線性函數(shù)。函數(shù)f:如果f是有限個(gè)仿射函數(shù)
的最大值,
是一個(gè)分段線性凸函數(shù)。我們可以利用這一特性,通過對(duì)偶割平面法找到最佳拉格朗日乘子μ。
3) 更新拉格朗日因子:
次梯度法是解決拉格朗日對(duì)偶問題和更新拉格朗日因子的常用方法。然而,它的收斂速度較慢[41],[42]。次梯度法僅利用最后一次迭代的信息來更新拉格朗日因子。另一方面,使用雙剖切面方法有助于存儲(chǔ)所有先前發(fā)現(xiàn)的拉格朗日因子
、最佳拉格朗日松弛函數(shù)
和次梯度
的信息直至迭代n次,并在下一次迭代中使用它們找到新的拉格朗日乘子

[43]。對(duì)于每個(gè)松弛約束的次梯度
可從(38)中找到。

根據(jù)次梯度的定義,不等式(39)適用于所有μ

為了更新拉格朗日因子,引入了切割平面的穩(wěn)定版本作為近端束方法[44]。與切割平面法類似,在近端束法中考慮了對(duì)偶函數(shù)(41)的多面體模型。此外,將二次懲罰項(xiàng)添加到目標(biāo)函數(shù)(40)中以穩(wěn)定圍繞中心點(diǎn)的最優(yōu)拉格朗日因子
。中心點(diǎn)被認(rèn)為是迄今為止發(fā)現(xiàn)的能夠顯著改善解的最佳拉格朗日因子。參數(shù)
控制二次項(xiàng)的權(quán)重。通過迭代求解該優(yōu)化問題并提供了一系列拉格朗日乘數(shù)因子
,迭代N被視為切割平面優(yōu)化的最后一次迭代。
4)使不可行解可行:
迭代求解拉格朗日松弛問題收斂到
和
分別作為最佳拉格朗日因數(shù),綠色信號(hào)狀態(tài)和黃色信號(hào)狀態(tài)。此外,它還產(chǎn)生了所有CAVs的相應(yīng)最優(yōu)軌跡。盡管重新表述該問題將對(duì)偶間隙降低到非常小的值,拉格朗日松弛的最優(yōu)解仍然可能是不可行的信號(hào)定時(shí)參數(shù),不滿足松弛約束(33)。我們引入一個(gè)簡(jiǎn)單的優(yōu)化問題,在這種情況下找到一個(gè)很好的可行信號(hào)定時(shí)解決方案。用(33)重新表示約束(13),將拉格朗日松弛問題的信號(hào)定時(shí)變量的解推到凸多面體中的可行整數(shù)值附近。因此,不需要改變拉格朗日松弛解的結(jié)構(gòu)。我們需要將最終的不可行信號(hào)定時(shí)解決方案投影到最接近的可行整數(shù)點(diǎn)。引入補(bǔ)充優(yōu)化問題FP,以確保松弛問題解的可行性。FP中的決策變量包含所有信號(hào)定時(shí)變量。此外,從拉格朗日松弛中發(fā)現(xiàn)的

和
是輸入。所提出的優(yōu)化問題的目標(biāo)函數(shù)使信號(hào)定時(shí)變量與拉格朗日松弛的相應(yīng)解之間的差異最小化。此外,所有信號(hào)定時(shí)約束,包括解除的成對(duì)約束,在FP中都被考慮到。假設(shè)最佳信號(hào)定時(shí)參數(shù)始終同時(shí)為至少兩個(gè)運(yùn)動(dòng)提供非紅色信號(hào)狀態(tài),則問題中還添加了約束條件(43)。如果信號(hào)配時(shí)的預(yù)測(cè)范圍大于交叉口所有引道的最小綠燈時(shí)間,則優(yōu)化問題FP始終是可行的。
5) 滾動(dòng)時(shí)域控制:
將拉格朗日松弛法嵌入滾動(dòng)時(shí)域控制(RHC)中,用于尋找最優(yōu)信號(hào)和軌跡優(yōu)化問題,以考慮問題的動(dòng)態(tài)性質(zhì)。圖5顯示了通用解決方案技術(shù)框架。

圖5 嵌入RHC的拉格朗日松弛過程
首先,我們?cè)跁r(shí)間步長(zhǎng)0處初始化拉格朗日因數(shù)。然后,對(duì)每個(gè)車道組求解LR-SSTTO規(guī)劃,確定信號(hào)配時(shí)參數(shù)和車輛軌跡。解被傳遞到對(duì)偶函數(shù)(DO)規(guī)劃以更新拉格朗日因數(shù)。通過計(jì)算SSTTO問題的上下界差來評(píng)價(jià)收斂準(zhǔn)則。然后對(duì)信號(hào)定時(shí)參數(shù)的可行性進(jìn)行驗(yàn)證。如果解不可行,則解決優(yōu)化問題FP,根據(jù)可行的信號(hào)計(jì)劃更新最優(yōu)CAV和HV軌跡。如果拉格朗日松弛法的解是可行的,則它們是原問題的最優(yōu)解,不需要求解FP。RHC在進(jìn)入Vissim微模擬器的第一個(gè)時(shí)間步中,除了信號(hào)配時(shí)計(jì)劃外,還實(shí)施CAVs的軌跡。然后,根據(jù)最后更新的拉格朗日松弛解更新拉格朗日因子,規(guī)劃范圍向前滾動(dòng)一個(gè)時(shí)間步,直到研究階段結(jié)束。
5 案例研究
我們將建議的解決方案技術(shù)應(yīng)用于具有專用左轉(zhuǎn)車道的孤立十字交叉口,如圖4所示。假設(shè)車輛在到達(dá)交叉口附近之前已在所需車道上。交叉口前后的探測(cè)范圍為1000英尺。信號(hào)狀態(tài)每?jī)擅敫乱淮?,而車輛加速度、速度和位置每0.5秒更新一次。RHC的預(yù)測(cè)范圍為20秒。更多詳情見表2。
表2 案例參數(shù)
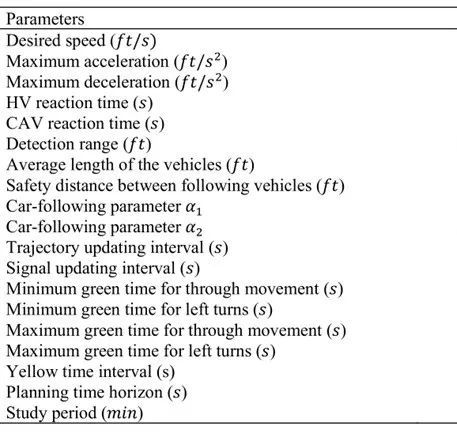
表3 STTO案例研究中的要求模式

STTO問題在15分鐘的學(xué)習(xí)時(shí)間內(nèi)得到解決。表3總結(jié)了本研究中測(cè)試的不同場(chǎng)景。對(duì)于每種情況,考慮六種不同的CAVs市場(chǎng)滲透率(即0%、20%、40%、60%、80%和100%),以評(píng)估合作信號(hào)配時(shí)和軌跡優(yōu)化問題。Vissim[45]用于測(cè)試所提出的算法。COM接口用于收集網(wǎng)絡(luò)中車輛的信息,并將最優(yōu)軌跡應(yīng)用于CAVs的運(yùn)動(dòng)。所提出的算法是用Java編寫的,運(yùn)行在具有Intel core i-9-9900 CPU和64 GB內(nèi)存的臺(tái)式計(jì)算機(jī)上。CPLEX[46]用于解決MILP優(yōu)化問題。
6 結(jié)果
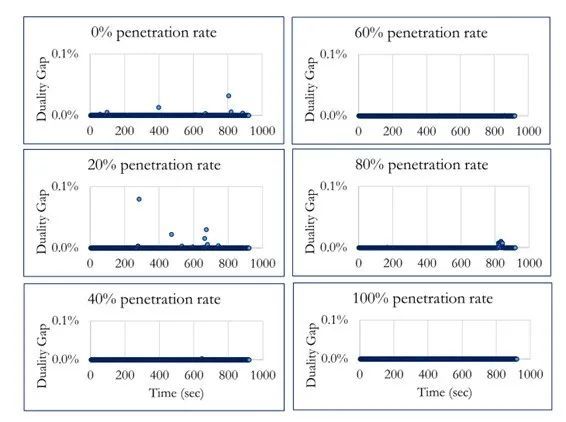
圖6 重構(gòu)后的拉格朗日松弛的對(duì)偶性缺口
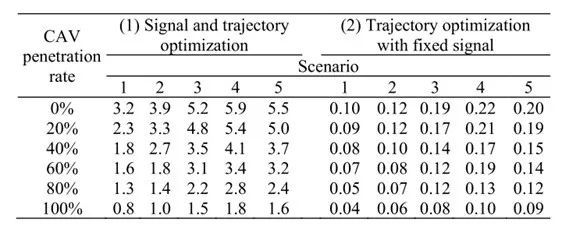
表4 不同場(chǎng)景下的平均運(yùn)行時(shí)間(s)
圖6顯示了場(chǎng)景4中的對(duì)偶間隙,即本研究中測(cè)試的最高需求水平,當(dāng)兩兩沖突約束(13)被更緊密的派系取代時(shí),使用所提的拉格朗日松弛技術(shù)解決STTO問題的結(jié)果。由于該問題是通過滾動(dòng)時(shí)域控制來解決的,因此每?jī)擅腌娗蠼庖淮卫窭嗜账沙趩栴},以找到最佳信號(hào)配時(shí)方案。因此,對(duì)于動(dòng)態(tài)解決的所有松弛問題,都會(huì)報(bào)告對(duì)偶間隙。圖6表明對(duì)偶間隙大多為零,這意味著所提出的解決方案技術(shù)大多具有強(qiáng)對(duì)偶性。此外,在場(chǎng)景4中使用不同的CAV市場(chǎng)滲透率測(cè)試的所有情況下證明對(duì)偶間隙總是小于0.1%。注意,其他場(chǎng)景的結(jié)果也證實(shí)了相同的模式。表Ⅳ顯示了情景1至5下所提模型的平均計(jì)算運(yùn)行時(shí)間。平均運(yùn)行時(shí)間由兩個(gè)優(yōu)化程序顯示,其中(1)同時(shí)優(yōu)化信號(hào)定時(shí)參數(shù)和軌跡,(2)僅使用固定信號(hào)定時(shí)參數(shù)優(yōu)化軌跡。在這兩種情況下,當(dāng)CAV市場(chǎng)滲透率增加時(shí),優(yōu)化運(yùn)行時(shí)間減少,因?yàn)榕cHVs跟馳模型相關(guān)的變量數(shù)量減少。還表明,增加通信量與更高的運(yùn)行時(shí)間相關(guān)。使用增強(qiáng)拉格朗日松弛技術(shù)進(jìn)行信號(hào)和軌跡優(yōu)化的最小和最大平均運(yùn)行時(shí)間為0.8秒和5.9秒。需要注意的是,所提出的方法是一種迭代方法,并且可能無法實(shí)時(shí)找到最優(yōu)解,因?yàn)樾盘?hào)定時(shí)參數(shù)每2秒進(jìn)行一次優(yōu)化。然而,通過將最優(yōu)性間隔設(shè)置為更高的值或以更高的間隔更新信號(hào)定時(shí)參數(shù),可以實(shí)現(xiàn)實(shí)時(shí)解決方案。表Ⅳ還顯示了固定信號(hào)參數(shù)下軌跡優(yōu)化的最小和最大運(yùn)行時(shí)間為0.04s和0.22s。表Ⅴ比較了STTO策略不同CAV市場(chǎng)滲透率的平均行程時(shí)間和三種實(shí)用信號(hào)控制方法:(a)固定時(shí)間[47]–[49],(b)驅(qū)動(dòng)控制和(c)自適應(yīng)信號(hào)控制。固定時(shí)間信號(hào)控制可被視為基線,其中信號(hào)定時(shí)參數(shù)根據(jù)一天中不同時(shí)間的需求水平預(yù)測(cè)進(jìn)行優(yōu)化。固定時(shí)間信號(hào)控制無法響應(yīng)不可預(yù)見的需求變化。驅(qū)動(dòng)控制裝置利用車輛檢測(cè)器,并能對(duì)觀測(cè)到的交通環(huán)境變化作出反應(yīng)。然而,它不能預(yù)測(cè)近期的情況。自適應(yīng)信號(hào)控制可以預(yù)測(cè)近期的交通狀況,并主動(dòng)改變信號(hào)配時(shí)參數(shù)。我們使用PTV Vistro[50]找到最佳固定時(shí)間和驅(qū)動(dòng)信號(hào)定時(shí)計(jì)劃。此外,還提供了基于小區(qū)傳輸模型[51]–[53]的自適應(yīng)信號(hào)控制方法的結(jié)果,以供進(jìn)一步比較。
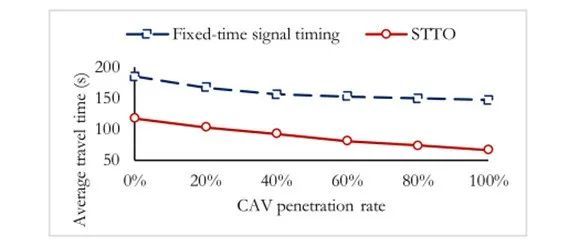
結(jié)果表明,在不同CAV滲透率的所有情況下,與固定時(shí)間、驅(qū)動(dòng)和自適應(yīng)信號(hào)控制相比,STTO的平均行程時(shí)間顯著縮短。結(jié)果還表明,平均行程時(shí)間隨著CAV滲透率的增加而減少,這與預(yù)期一致。然而,在交通量較低的情況下,這種減少不太明顯。例如,在場(chǎng)景1和場(chǎng)景2中,當(dāng)CAV穿透率為60%、80%和100%時(shí),平均行程時(shí)間幾乎相同。另一方面,在需求水平較高的情況下(如場(chǎng)景4),增加CAV滲透率仍然可以通過減少所有車輛的平均行駛時(shí)間來改善交叉口的性能。此外,當(dāng)CAV的市場(chǎng)滲透率發(fā)生變化時(shí),我們比較了STTO與固定時(shí)間信號(hào)配時(shí)計(jì)劃的性能。本分析考慮了場(chǎng)景4,因?yàn)槠湫枨罅孔罡?。?dāng)信號(hào)配時(shí)固定時(shí),只有CAVs的軌跡被優(yōu)化,以有效利用綠燈時(shí)間并減少交叉口的停車次數(shù)。圖7顯示了STTO在平均行程時(shí)間方面總是優(yōu)于固定時(shí)間信號(hào)定時(shí)計(jì)劃。此外,當(dāng)CAV的市場(chǎng)滲透率增加時(shí),與固定時(shí)間計(jì)劃相比,STTO的行程時(shí)間減少率更高。
表5 不同信號(hào)控制器的平均通行時(shí)間
圖7 比較STTO與固定時(shí)間信號(hào)在不同的CAV市場(chǎng)滲透率下的表現(xiàn)
圖8 場(chǎng)景4中的平均隊(duì)列長(zhǎng)度
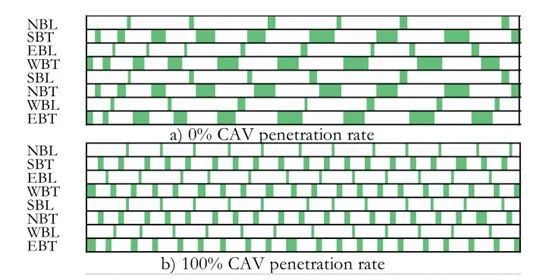
圖9 比較0%和100%CAV比例下的信號(hào)配時(shí)計(jì)劃
圖8顯示了場(chǎng)景4中具有最高的測(cè)試需求水平的不同CAV滲透率交叉口的不同引道的所有車流的平均排隊(duì)長(zhǎng)度。平均隊(duì)列長(zhǎng)度隨著CAV市場(chǎng)滲透率的增加而減少。當(dāng)?shù)缆飞蠜]有控制人駕駛車輛移動(dòng)的CAV時(shí),平均排隊(duì)長(zhǎng)度約為450英尺。當(dāng)所有車輛均為CAVs時(shí),平均排隊(duì)長(zhǎng)度減少到50英尺以下。
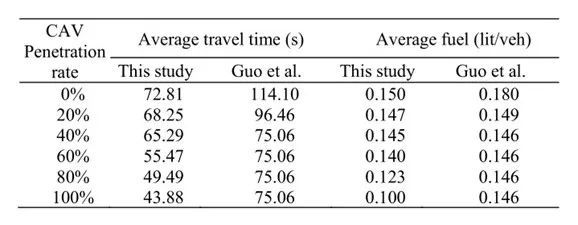
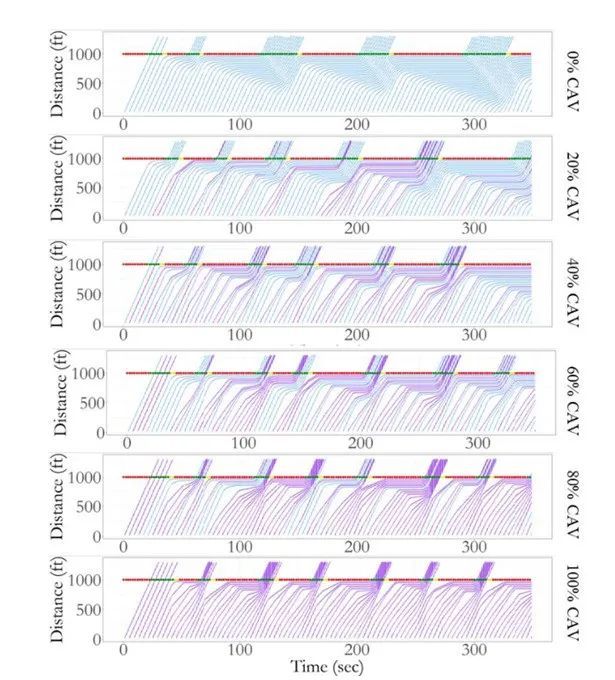
圖9顯示了在場(chǎng)景4中,在測(cè)試需求水平最高的情況下,交叉口不同引道中所有車輛的信號(hào)配時(shí)參數(shù),CAV滲透率為0%和100%。當(dāng)CAV滲透率為零時(shí),交叉口所有移動(dòng)的綠燈期較長(zhǎng)。這是由于人力驅(qū)動(dòng)車輛的啟動(dòng)損失時(shí)間較長(zhǎng)。另一方面,當(dāng)所有車輛都是CAVs時(shí),綠燈期更短、更頻繁。這是因?yàn)樵诮徊婵谇巴\嚂r(shí),CAVs的啟動(dòng)損失時(shí)間較短。此外,CAV調(diào)整其速度,以最大速度通過交叉口;因此,通過交叉口需要更短的綠燈時(shí)間。圖10顯示了在具有最高測(cè)試需求的場(chǎng)景4中,不同市場(chǎng)滲透率下東行通過(EBT)的CAVs和HVs的軌跡。增加CAVs的滲透率與所有車輛通過交叉口的平滑軌跡相關(guān)。此外,隨著CAVs的市場(chǎng)滲透率的增加,隊(duì)列的后面越來越靠近交叉口。由于目前的實(shí)踐狀態(tài)策略沒有一種與CAVs軌跡共同優(yōu)化信號(hào)配時(shí)計(jì)劃,因此我們將STTO的結(jié)果與Guo等人最近開發(fā)的最新狀態(tài)策略進(jìn)行了比較[3]。本研究使用動(dòng)態(tài)規(guī)劃和射擊啟發(fā)式方法,在混合環(huán)境中優(yōu)化CAVs的信號(hào)配時(shí)計(jì)劃和軌跡。結(jié)果表明,本文提出的算法可以在較短的計(jì)算時(shí)間內(nèi)找到較低的平均行程時(shí)間和燃油消耗。燃油消耗量根據(jù)VT-Micro模型[54]計(jì)算,參數(shù)與Maet al[55]相同。以下參數(shù)的設(shè)置與Guo等人[3]中的研究案例完全相同:交叉路段長(zhǎng)度:1312英尺,飽和率:0.6,直行最大速度:98ft/s,左轉(zhuǎn)最大速度:79ft/s,規(guī)劃視距:122s,跟車參數(shù):最大加速度=4.72 ft/S2,最大減速度=5.48ft/S2,優(yōu)化信號(hào)定時(shí)計(jì)劃的步長(zhǎng):8秒。
表Ⅵ顯示,通過增加CAVs的市場(chǎng)滲透率,平均行程時(shí)間和燃油消耗量有所減少。此外,對(duì)于不同的CAVs市場(chǎng)滲透率,我們提出的算法的性能優(yōu)于[3]中的最佳結(jié)果。應(yīng)注意的是,Guo等人[3]假設(shè)信號(hào)配時(shí)計(jì)劃有四個(gè)階段。然而,我們的研究包括八個(gè)階段,這代表了一個(gè)更一般的情況。此外,[3]中的相位即使某些相位可以跳過也在循環(huán)中按固定順序考慮。另一方面,在我們的研究中,考慮了無序的相位。因此,這些參數(shù)的差異可能會(huì)影響比較的結(jié)果。所有這些差異為我們的問題創(chuàng)造了一個(gè)更大的可行區(qū)域,這導(dǎo)致了表Ⅵ所示的解決方案性能差異顯著。表Ⅶ顯示了STTO在研究期間5、10、15和30分鐘內(nèi)獲得的平均行程時(shí)間、平均油耗和總運(yùn)行時(shí)間。針對(duì)需求最高的場(chǎng)景4和兩個(gè)CAV市場(chǎng)滲透率分別為40%和100%的場(chǎng)景4提供了性能度量。表Ⅶ中的趨勢(shì)表明,由于網(wǎng)絡(luò)中存在更多車輛,研究周期的延長(zhǎng)與更高的平均行程時(shí)間和平均燃油消耗量相關(guān)。此外,由于變量數(shù)量和內(nèi)存使用量的增加,運(yùn)行時(shí)間會(huì)隨著研究周期的增加而增加。
圖10 Lane1中CAVs和HVs的軌跡
表6 與GUO ET AL.[4]的方法對(duì)比
7 結(jié)論
本研究開發(fā)了一種在CAVs和HVs混合交通環(huán)境下協(xié)調(diào)信號(hào)交叉口信號(hào)配時(shí)和軌道優(yōu)化的方法。我們將STTO公式化為一個(gè)混合整數(shù)非線性程序,假設(shè)所有車輛都已連接,或者交叉口配備了能夠提供車輛位置的探測(cè)器(如雷達(dá)裝置)。使用Helly的跟車模型預(yù)測(cè)HVs的軌跡。由于非線性和二進(jìn)制變量的存在,所提出的優(yōu)化程序非常復(fù)雜。因此,我們將非線性約束線性化,并使用拉格朗日松弛技術(shù)將可交互優(yōu)化問題分解為車道級(jí)子問題,從而降低了問題的復(fù)雜性。因此,交叉口各車道的信號(hào)配時(shí)參數(shù)和車輛軌跡可由單個(gè)控制器控制。我們還重新構(gòu)造了可行域緊凸殼的STTO問題,以減少對(duì)偶間隙。此外,在拉格朗日松弛問題收斂后,當(dāng)松弛約束不滿足時(shí),引入互補(bǔ)優(yōu)化問題來尋找高質(zhì)量的可行信號(hào)定時(shí)參數(shù)。所提出的解決方案技術(shù)嵌入了一種后退地平線控制技術(shù),以捕捉問題的動(dòng)態(tài)性質(zhì)。
結(jié)果表明,所開發(fā)的方法可以在最大0.1%的最優(yōu)性差距內(nèi)找到解決方案。研究還表明,不同CAV市場(chǎng)滲透率測(cè)試下STTO的性能優(yōu)于自適應(yīng)控制器信號(hào)配時(shí)性能,平均行程時(shí)間減少5%至51%的。此外,增加CAVs的穿透率可減少交叉口所有車輛的平均行程時(shí)間。這種減少在較高的交通量中更為顯著。建議的方法適用于只進(jìn)行左轉(zhuǎn)運(yùn)動(dòng)的交叉口布局。這將是值得在未來推廣的方法,并找到在所有交叉口類型中的最佳信號(hào)配時(shí)參數(shù)和車輛軌跡。此外,本研究假設(shè)車輛不會(huì)在檢測(cè)到的交叉口范圍內(nèi)改變車道,也不會(huì)使用CAV車道改變來進(jìn)一步控制交通流。開發(fā)預(yù)測(cè)HVs換道行為和優(yōu)化CAV換道決策的算法可以進(jìn)一步改善交通運(yùn)行。這項(xiàng)研究使用了一個(gè)線性跟馳模型,使用更復(fù)雜的跟馳模型是值得探索的。研究交通網(wǎng)絡(luò)中信號(hào)配時(shí)和軌跡控制的影響,交叉口相互溝通并協(xié)調(diào)決策,為進(jìn)一步改善交通運(yùn)行和安全提供了巨大潛力需要進(jìn)一步研究。
參考文獻(xiàn)

點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 53



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
