




 廣告
廣告





















































車載動力電池BMS技術(shù)要點解析及神經(jīng)網(wǎng)絡(luò)技術(shù)的應(yīng)用
2022-01-27 13:39:43· 來源:汽車動力總成

電動汽車電池管理系統(tǒng)(BMS)是連接車載動力電池和電動汽車的重要紐帶,將電池或電池組的監(jiān)測及管理集于一體,確保電池或者電池組的安全可靠,以最佳狀態(tài)輸出動力
電動汽車電池管理系統(tǒng)(BMS)是連接車載動力電池和電動汽車的重要紐帶,將電池或電池組的監(jiān)測及管理集于一體,確保電池或者電池組的安全可靠,以最佳狀態(tài)輸出動力。BMS可以實現(xiàn)對電池的實時監(jiān)控、自動均衡、智能充放電等重要功能,在有效保障電池安全的同時,可以實現(xiàn)對電池剩余電量的監(jiān)測,通過有效的電池管理,可以提高電動汽車續(xù)航里程,是動力電池組中不可或缺的重要部件,對于電動車的正常運行意義重大。
電池管理系統(tǒng)大致功能可分為,電池狀態(tài)的檢測,包括但不限于對電壓、電流、溫度三種物理量的檢測,它是電池管理系統(tǒng)中最基本的功能,是其他各項功能中的前提和基礎(chǔ);
電池的眾多安全保護,包括但不限于過流(動力電池都支持短時間段內(nèi)的放載放電,在車輛起步和加速中提供較大電流滿足動力要求)、過充過放(防止電池在滿電時繼續(xù)充電、沒電時繼續(xù)放電)、過溫保護(面對溫度接近危險值或突然快速上升,需要采取相應(yīng)的保護措施);
電池的能量控制,包括但不限于充放電管理(在充電過程中對充電電壓、電壓進行實時優(yōu)化控制,來達到調(diào)節(jié)充電時間、效率和程度;以及放電過程中適當?shù)南拗谱畲蠓烹婋娏鳎瑏碓黾榆囕v續(xù)駛里程以及電池壽命)、電池均衡管理(電池PACK包有“木桶效應(yīng)“,最終性能取決于“短板“的那塊單體電池,現(xiàn)有主流電動汽車電池均衡管理采用被動均衡技術(shù),為電池組中每個單體電池并聯(lián)一個耗散器件進行放電分流,實現(xiàn)單體能量的均衡,在電池組中,某單體電池電壓與平均電池電壓相差到一定閾值時,連通分流電阻將單體電池部分電量以熱能的形式消耗掉,把電壓降到平均電壓水平。);
電池的狀態(tài)分析,有電池剩余電量SOC、以及電池剩余壽命SOH評估。電池SOH、SOC受到工作溫度、放電流的大小等因素影響,需要在使用過程中不斷的進行修正來確保駕駛員獲得較為準確的信息。
以及電池的信息儀表盤顯示及與其他控制器間的數(shù)據(jù)信息交互等。
動力電池荷電狀態(tài)估算(SOC)是電池管理系統(tǒng)(BMS)的關(guān)鍵技術(shù),是電池能量管理功能的基礎(chǔ),若無法準確地估算SOC,會減低電池的安全性能,無法有效地保護電池,大幅度降低電池的使用效率。SOC不能直接測量,傳統(tǒng)的以端電壓為測量對象無法得到精確的SOC值。目前有多種SOC估算方法,有開路電壓法、安時積分法(現(xiàn)多數(shù)純電車使用“安時積分法+開路電壓法“來解決SOC估算,即在放電平臺處使用開路電壓法估算、平臺前后段結(jié)合安時積分法估算SOC值)、各種卡爾曼濾波法和神經(jīng)網(wǎng)絡(luò)法等。
人工神經(jīng)網(wǎng)絡(luò)通過一定的結(jié)構(gòu)將功能簡單的神經(jīng)元組織起來,實現(xiàn)數(shù)據(jù)群體的并行處理。根據(jù)連接方式的差異,神經(jīng)網(wǎng)絡(luò)可分為:分層神經(jīng)網(wǎng)絡(luò)和相互連接型神經(jīng)網(wǎng)絡(luò)。神經(jīng)網(wǎng)絡(luò)的學(xué)習基于對大量數(shù)據(jù)的訓(xùn)練,也是網(wǎng)絡(luò)模型調(diào)整自身參數(shù)的過程。其可以通過對自身參數(shù)的調(diào)節(jié),提高自身的學(xué)習能力,達到對環(huán)境的了解。學(xué)習方式有兩種,有導(dǎo)師學(xué)習和無導(dǎo)師學(xué)習,學(xué)習算法一般有以下兩種:
(1)Hebb學(xué)習算法:
同時興奮的兩個神經(jīng)元會加強彼此之間的突觸連接,即連接權(quán)值增大,其數(shù)學(xué)表達式為:

其中,r表示兩個神經(jīng)元之間連接權(quán)值的變化量,表示神經(jīng)元 和 j 的輸出,?為學(xué)習速率。
(2)δ學(xué)習算法:
設(shè)網(wǎng)絡(luò)的輸入、輸出樣本數(shù)據(jù)對為(,),網(wǎng)絡(luò)實際輸出為,其中:

則可用下列式子表示δ學(xué)習規(guī)則:

其中,r表示兩個神經(jīng)元連接權(quán)值的變化量,表示神經(jīng)元i的輸出,?為學(xué)習速率,為以下函數(shù)對神經(jīng)元輸入?yún)?shù)的偏導(dǎo)數(shù):

本文根據(jù)動力電池數(shù)據(jù)采集及SOC估算特點,采取多層前向型神經(jīng)網(wǎng)絡(luò),多層前向型神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)一般分為三層:輸入層、隱含層和輸出層,設(shè)計其結(jié)構(gòu)如圖:
下以三元鋰電池為實驗對象,具體參數(shù)為:標稱電壓為3.8 V,單體額定容量為74 Ah,充電上限電壓為4.25 V,下限電壓為2.75 V,最大放電電流為2 C(以148A電流放電)。外部的信號-以三元鋰電池電壓、電流、溫度由輸入層接入,各輸入單元將輸入信號傳送給隱含層的各單元。隱含層作為神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)內(nèi)部的處理單元,根據(jù)不同的網(wǎng)絡(luò)需求其層數(shù)也不同。輸出信號估算SOC值經(jīng)輸出層輸出。通過將準備好的4512組,每組63個數(shù)據(jù)作為樣本,4303組數(shù)據(jù)作為訓(xùn)練樣本,建立模型,導(dǎo)入訓(xùn)練數(shù)據(jù),用于網(wǎng)絡(luò)訓(xùn)練及測試網(wǎng)絡(luò)的擬合性能,實現(xiàn)非線性函數(shù)的擬合,最終完成網(wǎng)絡(luò)預(yù)測功能。本次實驗209組數(shù)據(jù)作為測試樣本,網(wǎng)絡(luò)訓(xùn)練結(jié)束后,用于預(yù)測函數(shù)輸出,最后對預(yù)測結(jié)果進行分析。
神經(jīng)網(wǎng)絡(luò)模型建立時,將單體電池電壓、單體溫度、總電流及總電壓等數(shù)據(jù)導(dǎo)入模型,進行訓(xùn)練??偟臄?shù)據(jù)導(dǎo)入為63組,故輸入層節(jié)點數(shù)為63。SOC作為模型訓(xùn)練的唯一目標,所以輸出層的節(jié)點為1。隱含層的節(jié)點數(shù)由下式確定:
h: 隱含層節(jié)點數(shù),m:輸入層節(jié)點數(shù),n: 輸出層節(jié)點數(shù),a:1~10之間的調(diào)節(jié)常數(shù)
具體實現(xiàn)可以使用MATLAB中的神經(jīng)網(wǎng)絡(luò)工具箱,打開人工神經(jīng)網(wǎng)絡(luò)窗口,導(dǎo)入準備好的數(shù)據(jù),設(shè)置訓(xùn)練樣本80%,驗證樣本10%,測試樣本10%。訓(xùn)練函數(shù)為trainlm(Levenberg-Marquardt BP訓(xùn)練函數(shù)),性能函數(shù)為mse(均方誤差函數(shù)),學(xué)習函數(shù)為learngd(基于梯度下降法的學(xué)習函數(shù)),傳遞函數(shù)為tansig(S型的正切函數(shù)),迭代次數(shù)初始設(shè)置為100次。
建立好的神經(jīng)網(wǎng)絡(luò)模型為:

設(shè)置的隱含層個數(shù)為9層,根據(jù)訓(xùn)練結(jié)果進行隱含層個數(shù)的修改。
網(wǎng)絡(luò)參數(shù)設(shè)置完畢,將建立好的模型進行數(shù)據(jù)訓(xùn)練。訓(xùn)練結(jié)果如下:
由回歸圖可以看出神經(jīng)網(wǎng)絡(luò)的訓(xùn)練、驗證和測試的結(jié)果。對于一個好的擬合,其數(shù)據(jù)應(yīng)該沿45°角線,表示輸出等于期望。本次擬合輸出結(jié)果的R值均大于0.99,表明擬合在理論是較優(yōu)的,也表明所建立的神經(jīng)網(wǎng)絡(luò)模型是較優(yōu)的。由性能圖可以看到,本次函數(shù)擬合最佳迭代次數(shù)為86次。
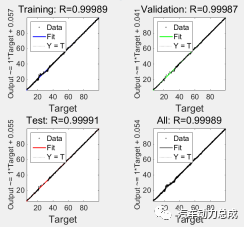
回歸圖
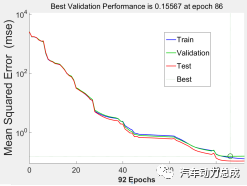
性能圖
為訓(xùn)練模型自動生成的部分誤差數(shù)據(jù)值,前圖為網(wǎng)絡(luò)輸出的估算值,后圖為輸入值與估算值的誤差數(shù)據(jù)。由圖8可以看出,誤差穩(wěn)定在0.2~0.3之間,最大誤差為0.8,網(wǎng)絡(luò)輸出值與網(wǎng)絡(luò)訓(xùn)練目標值基本一致,說明建立的網(wǎng)絡(luò)模型是成功的。
訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)模型,應(yīng)用于實驗數(shù)據(jù)的仿真。仿真結(jié)果如下:
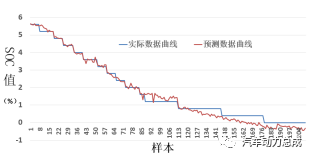
SOC仿真曲線
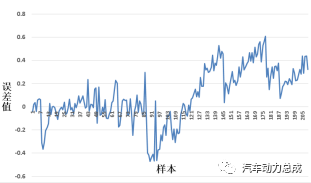
SOC誤差曲線
SOC仿真曲線圖中藍色曲線為實際數(shù)值曲線,紅色曲線為預(yù)測數(shù)值曲線。由仿真結(jié)果可以看出,在所測試的209組數(shù)據(jù)中,SOC的預(yù)測數(shù)值曲線基本沿SOC實際數(shù)值曲線變化。在實際的測試數(shù)據(jù)中,SOC數(shù)值是實時變化的,每秒的SOC都會產(chǎn)生輕微變化,但受采集精度影響,實際的SOC曲線并不是平滑的,而表現(xiàn)為階梯狀。在預(yù)測結(jié)果中,數(shù)據(jù)變化更平穩(wěn),曲線圖也更平滑,函數(shù)預(yù)測效果較優(yōu)。訓(xùn)練好的模型用于數(shù)據(jù)預(yù)測,如SOC誤差曲線圖所示,預(yù)測誤差結(jié)果位于±0.8之間,由于放電末期電池的溫度及內(nèi)阻抗增大的影響,SOC的誤差值波動范圍較大。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
