




 廣告
廣告





















































行星輪系的杠桿分析法介紹
2022-02-03 21:20:14· 來源:汽車動力總成

一、杠桿分析法的產(chǎn)生背景行星齒輪機(jī)構(gòu)是AT自動變速箱中的常用元件,通過控制不同行星齒輪排間的元件的連接和分離,可以實現(xiàn)變速箱的不同傳動比。由于行星齒輪機(jī)
一、杠桿分析法的產(chǎn)生背景
行星齒輪機(jī)構(gòu)是AT自動變速箱中的常用元件,通過控制不同行星齒輪排間的元件的連接和分離,可以實現(xiàn)變速箱的不同傳動比。由于行星齒輪機(jī)構(gòu)可以在極緊湊的空間內(nèi)實現(xiàn)非常大的傳動比,因此還被廣泛的使用在諸如E-CVT變速箱和EV的減速機(jī)構(gòu)中。
圖1 AT自動變速箱中的行星齒輪機(jī)構(gòu)

圖2 GKN開發(fā)的EV用第三代eAxle中使用了行星輪系
一個典型的行星排包括太陽輪、行星架、行星輪和齒圈,其中行星輪固定在行星架上,可以圍繞行星架上的固定軸做自轉(zhuǎn)運動,還可以繞太陽輪或齒圈做周轉(zhuǎn)運動的同時。進(jìn)行運動學(xué)和動力學(xué)分析時,常針對太陽輪、行星架、和齒圈三個元件。在行星排中,第三個元件的轉(zhuǎn)動狀態(tài)決定于另外兩個元件的轉(zhuǎn)動狀態(tài)。在進(jìn)行運動分析時,主體思路是利用牽連運動將周轉(zhuǎn)運動轉(zhuǎn)化為定軸輪系,使用解析法進(jìn)行計算。
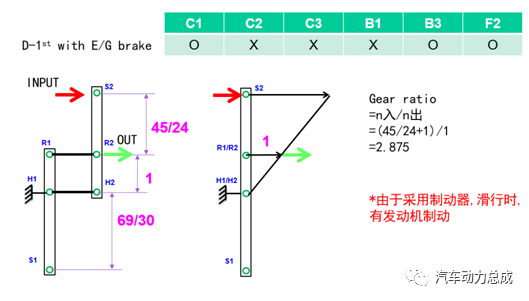
圖4 單行星輪的行星排和雙行星輪的行星排
解析法需要將整個行星輪系參考行星架的運動假設(shè)進(jìn)行轉(zhuǎn)化,然后計算出所需的傳動關(guān)系。隨著自動變速箱內(nèi)部行星齒輪排數(shù)量的增加,和組合方式復(fù)雜程度的不斷提高,尤其是單向離合器或可選單向離合器的增加,用傳統(tǒng)的解析法來計算扭矩和轉(zhuǎn)速,存在繁瑣、易出錯, 不直觀等問題, 很難讓人們對行星齒輪組建立清晰的概念。下圖展示了傳統(tǒng)的解析法計算過程。
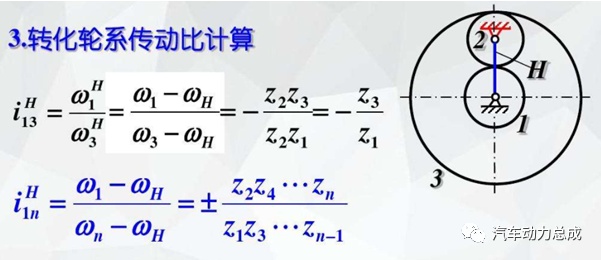
圖5 傳統(tǒng)的行星輪系解析法計算過程
GM在80年代就已經(jīng)意識到這個問題,并開發(fā)了杠桿法對行星輪系機(jī)構(gòu)進(jìn)行轉(zhuǎn)化和分析,可以通過杠桿分析法進(jìn)行變速箱行星輪系機(jī)構(gòu)的設(shè)計,分析和優(yōu)化,還可以利用此方法對離合器的布置和控制方案進(jìn)行優(yōu)化選型。這個方法簡單易用,目前已經(jīng)被廣泛應(yīng)用于多行星輪系機(jī)構(gòu)的設(shè)計開發(fā)中。杠桿法,簡單來說就是將復(fù)雜的旋轉(zhuǎn)運動轉(zhuǎn)化為人們熟悉的直線運動。用杠桿來進(jìn)行模擬和轉(zhuǎn)化,可以對行星輪系機(jī)構(gòu)進(jìn)行更加直觀的觀察和分析。
二、行星輪系與杠桿之間的轉(zhuǎn)化
首先將外嚙合定軸輪系齒輪傳動的運動關(guān)系和受力關(guān)系羅列如下。
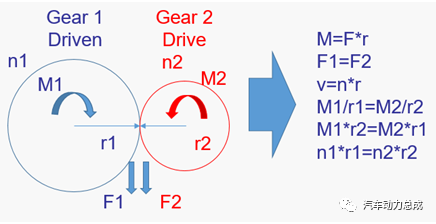
圖6 傳統(tǒng)的行星輪系解析法計算過程
可以得到M1*r2=M2*r1和n1*r1=n2*r2兩個公式,而且可以發(fā)現(xiàn),M1、M2、r1、r2四個參數(shù)的關(guān)系恰好與杠桿運動中杠桿左右兩端的力和位移及力臂之間的關(guān)系相似。因此,可以將上述定軸輪系中的各個參數(shù)位置按照如下關(guān)系帶入到一個杠桿模型中,得到一個同時滿足上述定軸輪系運動學(xué)和力學(xué)公式關(guān)系的杠桿。
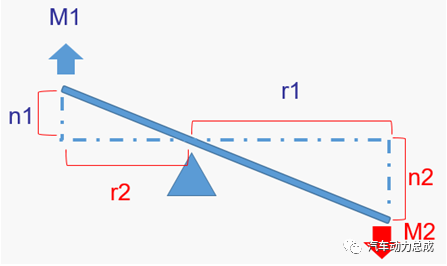
圖7 定軸外嚙合齒輪副轉(zhuǎn)化為杠桿
在這個杠桿中,原作用在主動和從動齒輪上的扭矩M1和M2被放置在杠桿的兩側(cè)作為力,由于外嚙合齒輪的主從動齒輪力矩方向是相反的,所以力的方向也是相反的;利用齒輪的分度圓半徑來繪制杠桿的左右端(力臂),其中r2作為M1的力臂,r1作為M2的力臂;杠桿兩端的位移使用原主動和從動齒輪的轉(zhuǎn)速進(jìn)行等效替代;如果考慮到時間因素,也可以把這杠桿兩段的位移等效為主從動齒輪轉(zhuǎn)動的圈數(shù)。
根據(jù)杠桿的原理,利用相似三角形的計算規(guī)則,在左右力臂關(guān)系已知的情況下(由于齒輪齒數(shù)關(guān)系或傳動比大小已知),通過杠桿一端的施力方向和大小可以計算出杠桿的另一端的受力大小和方向,也就是等效為待計算齒輪上的扭矩大小的轉(zhuǎn)動或受力方向。
如上所述,可以得到定軸輪系和杠桿之間的轉(zhuǎn)化關(guān)系表如下。
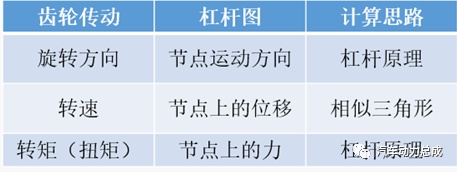
圖8 定軸輪系和杠桿之間的轉(zhuǎn)化關(guān)系
外嚙合齒輪副轉(zhuǎn)化為杠桿的過程
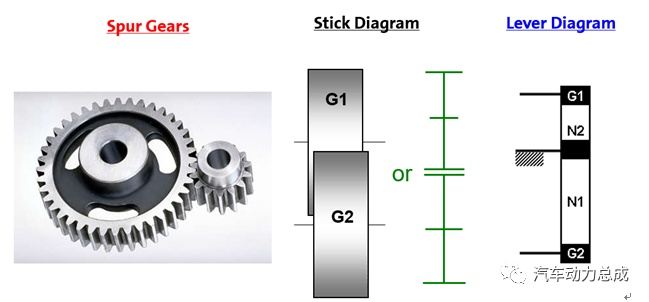
圖9 外嚙合齒輪副轉(zhuǎn)化為杠桿的過程
單行星輪行星排轉(zhuǎn)化為杠桿的過程
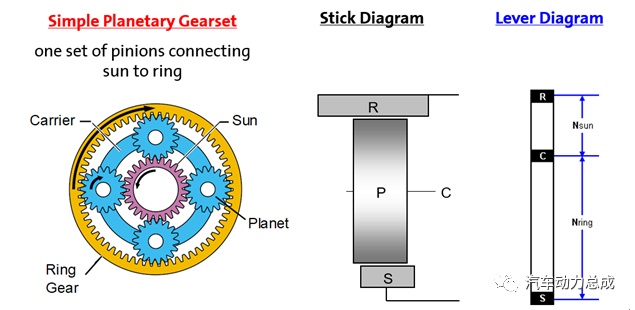
圖10 單行星輪行星排轉(zhuǎn)化為杠桿的過程
雙行星輪行星排轉(zhuǎn)化為杠桿的過程
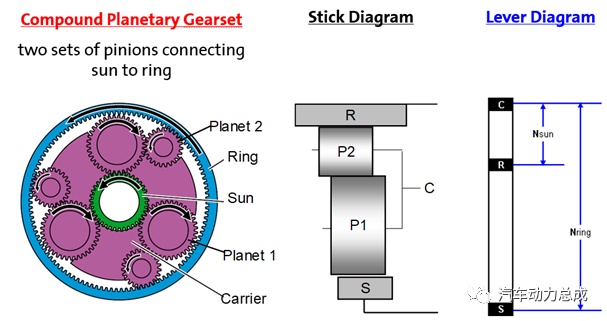
圖11 雙行星輪行星排轉(zhuǎn)化為杠桿的過程
由兩個行星排組成的行星輪系轉(zhuǎn)化為杠桿的過程
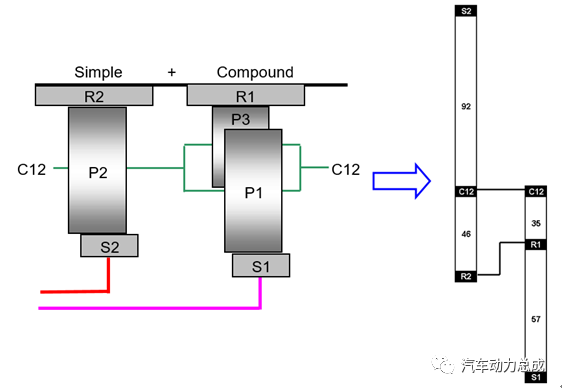
圖12 兩個行星排組成的行星輪系轉(zhuǎn)化為杠桿的過程
由于同一個行星排中,可以用齒輪的齒數(shù)來替代齒輪的半徑或分度圓之間的比例關(guān)系,所以在對由兩個行星排組成的行星輪系進(jìn)行杠桿轉(zhuǎn)化的過程中,可以先將兩個行星排按照各自的齒輪齒數(shù)關(guān)系分別進(jìn)行杠桿的轉(zhuǎn)化,然后將存在硬連接的元件用實線連接起來(實線表示被連接的元件的受力和運動狀態(tài)都是一致的)。由于代表兩個行星排的力臂的齒輪齒數(shù)并不可能恰好一致,因此還需要通過等比放大的原則進(jìn)行轉(zhuǎn)化,才能讓完整杠桿機(jī)構(gòu)的比例關(guān)系正確;同時,如果相鄰兩個杠桿上存在兩個實線連接的元件,則可以將這個兩個杠桿進(jìn)行合并,最終得到下圖右側(cè)的綜合杠桿。
最終將最初復(fù)雜的雙行星排輪系轉(zhuǎn)化成為一個簡單的杠桿。大大簡化了復(fù)雜行星輪系的分析過程。
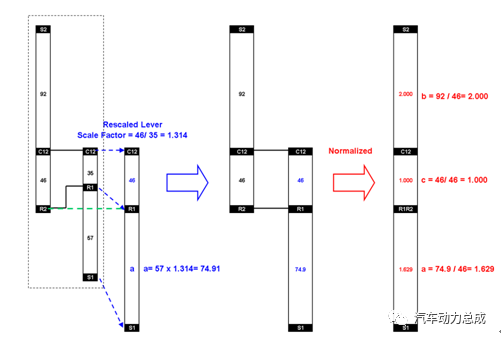
圖13 兩個行星排組成的行星輪系轉(zhuǎn)化為杠桿的過程
根據(jù)上述轉(zhuǎn)化原理和關(guān)系,可以將常見的行星排模塊與杠桿之間的轉(zhuǎn)化關(guān)系匯總?cè)缦卤硭?。同時,通過這些基本模塊之間的組合,可以實現(xiàn)各種復(fù)雜輪系向杠桿的轉(zhuǎn)化。
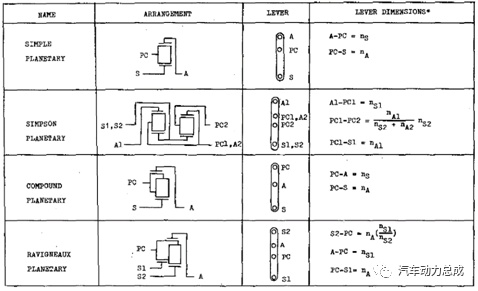
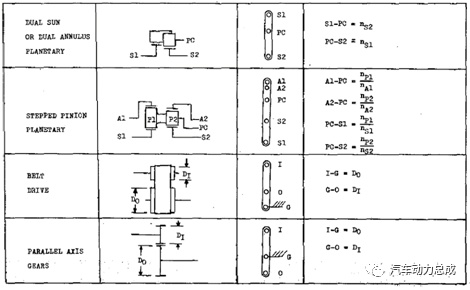
圖14 常見行星排模塊與杠桿之間的轉(zhuǎn)化
三、使用杠桿法對典型自動變速箱進(jìn)行機(jī)構(gòu)轉(zhuǎn)化
下圖是一款4AT自動變速箱的剖面圖和結(jié)構(gòu)圖,變速箱的行星輪系由前后兩個行星排組成,采用典型的拉維娜式結(jié)構(gòu)設(shè)計,特點是結(jié)構(gòu)緊湊、齒輪接觸面積較大,可以由太陽輪、行星架或齒圈作為輸出元件。其中A行星排是雙行星輪結(jié)構(gòu),B行星是單行星輪結(jié)構(gòu),兩個行星排有各自單獨的太陽輪,公用齒圈,且B行星排的行星輪是A行星排的行星輪之一。拉維娜式行星齒輪機(jī)構(gòu)及其變形被廣泛的使用在各類自動變速箱中。
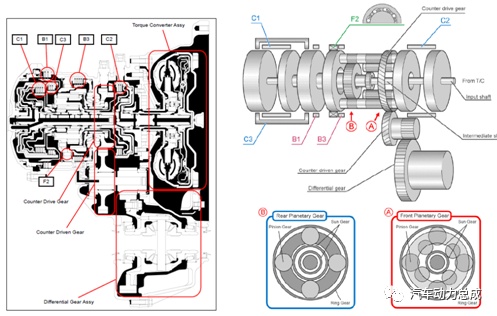
圖15 某4AT自動變速箱的結(jié)構(gòu)簡圖
定義杠桿向右為正方向,與發(fā)動機(jī)的旋轉(zhuǎn)方向相同,根據(jù)A/B行星排齒輪的齒數(shù)和元件之間的連接關(guān)系,以及離合器的布置位置,繪制杠桿圖如下。
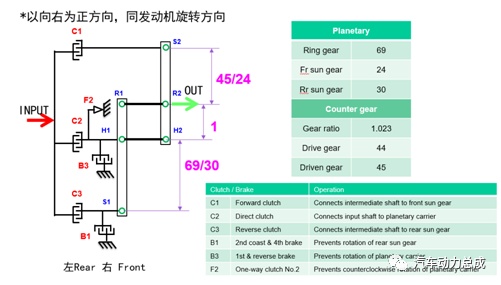
圖16 根據(jù)齒輪齒數(shù)信息和離合器布置位置繪制杠桿圖
四、使用杠桿法進(jìn)行擋位分析和速比計算
該變速箱的擋位邏輯圖如下(由于P/N擋較簡單,不單獨繪制杠桿圖)
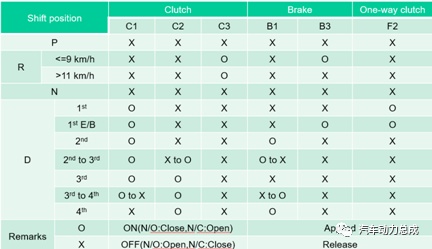
圖17 某4AT自動變速箱擋位邏輯圖
1擋無發(fā)動機(jī)制動時的運動狀態(tài)和速比
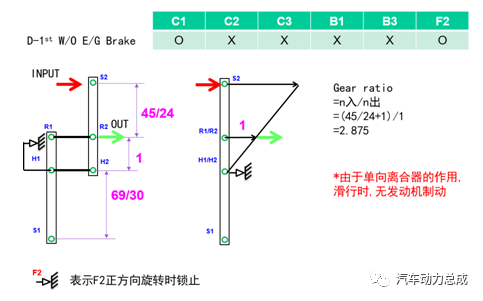
1擋有發(fā)動機(jī)制動時的運動狀態(tài)和速比
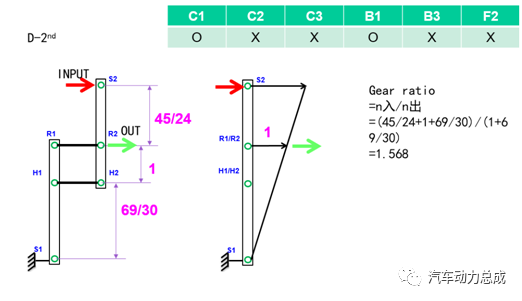
2擋時的運動狀態(tài)和速比
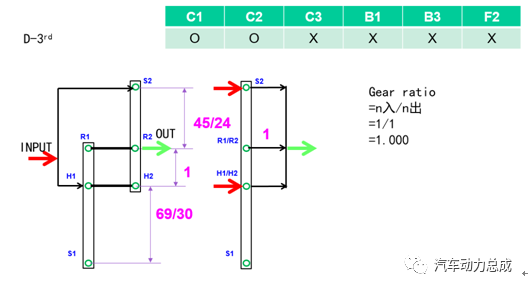
3擋時的運動狀態(tài)和速比
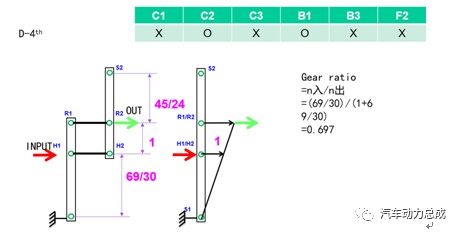
擋時的運動狀態(tài)和速比
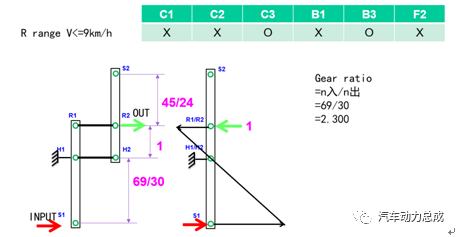
R擋時的運動狀態(tài)和速比,車速低于9km/h時
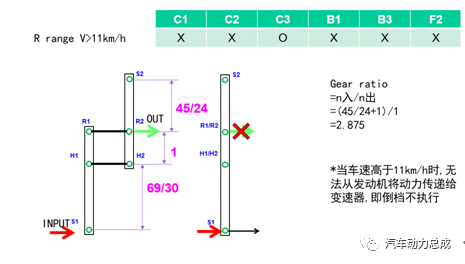
R擋時的運動狀態(tài)和速比,車速高于11km/h時
五、總結(jié)使用杠桿法進(jìn)行擋位分析和速比計算
杠桿法是一種高效的行星輪系的等效計算方法, 它可以將復(fù)雜的行星輪系轉(zhuǎn)化成等效的杠桿圖, 使行星輪系中各個元件的受力分析和運動簡單直觀,可以快速地對自動變速箱的工作狀態(tài)進(jìn)行分析, 有助于深入地了解自動變速箱的工作原理以及進(jìn)行新的行星輪系傳動機(jī)構(gòu)的開發(fā)。
- 下一篇:SUV A柱造型對氣動噪聲影響的分析與控制
- 上一篇:



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
