




 廣告
廣告





















































基于預(yù)測聲音行為的混合動(dòng)力汽車仿真階段評(píng)估
2022-02-28 20:30:20· 來源:AutoAero

摘要:隨著人們對(duì)復(fù)雜的現(xiàn)代混合動(dòng)力電動(dòng)汽車(HEV)概念的興趣與日俱增,這給NVH領(lǐng)域帶來了新的挑戰(zhàn)。低速時(shí)內(nèi)燃機(jī)(ICE)和電動(dòng)機(jī)(EM)之間的開關(guān)會(huì)產(chǎn)生不良
摘要:隨著人們對(duì)復(fù)雜的現(xiàn)代混合動(dòng)力電動(dòng)汽車(HEV)概念的興趣與日俱增,這給NVH領(lǐng)域帶來了新的挑戰(zhàn)。低速時(shí)內(nèi)燃機(jī)(ICE)和電動(dòng)機(jī)(EM)之間的開關(guān)會(huì)產(chǎn)生不良振動(dòng)和噪聲級(jí)的突然升高,從而影響接近靜音的電動(dòng)動(dòng)力傳動(dòng)系統(tǒng)運(yùn)行所實(shí)現(xiàn)的音質(zhì)和乘客舒適度。在最合適的駕駛位置啟動(dòng)ICE,以在駕駛模式之間實(shí)現(xiàn)無縫過渡,這是將駕駛員和乘客在HEV中感知的NVH質(zhì)量影響降至最低的關(guān)鍵。
為了在開發(fā)和設(shè)計(jì)階段的早期階段集成這一重要方面,可以使用模擬技術(shù)來解決客戶接受問題。通過分析NVH測量值,可以將車輛運(yùn)行中的不同噪聲成分分為ICE相關(guān)噪聲、EM相關(guān)噪聲和行駛噪聲。為了使系統(tǒng)靈活性達(dá)到最高,可以合成這些噪聲分量,提供一個(gè)完整的NVH評(píng)估工具,可以適應(yīng)不同的駕駛條件。
ICE和EM噪聲是使用基本發(fā)動(dòng)機(jī)順序預(yù)設(shè)的加法合成來模擬的,而駕駛噪聲是使用可變?yōu)V波器重新生成的,其參數(shù)取決于特定車輛和駕駛狀況。
這種方法對(duì)結(jié)果音質(zhì)進(jìn)行了非??煽亢蜏?zhǔn)確的評(píng)估。它可以用來產(chǎn)生一個(gè)完整的WLTP循環(huán),可以進(jìn)行主觀評(píng)估,判斷最佳和關(guān)鍵的聲音行為,可以與其他混合概念進(jìn)行比較。
通過實(shí)施本文介紹的流程和軟件,OEM可以從早期階段就清楚地了解其HEV項(xiàng)目中的NVH情況,幫助指導(dǎo)設(shè)計(jì)決策,并將后期開發(fā)階段的成本和時(shí)間密集型評(píng)估循環(huán)降至最低。
1. 引言
隨著電動(dòng)汽車的不斷發(fā)展,以及電池容量和充電時(shí)間方面仍然存在限制,混合動(dòng)力設(shè)計(jì)越來越受到人們的關(guān)注。當(dāng)電池狀態(tài)和功率要求允許純電動(dòng)駕駛時(shí),駕駛員可以在需要時(shí)依賴額外的內(nèi)燃機(jī)。
在NVH方面,混合動(dòng)力概念車也有缺點(diǎn),即在不利的情況下,內(nèi)燃機(jī)的啟動(dòng)會(huì)導(dǎo)致不良的振動(dòng)和突然增加的噪音水平。因此,工程精力都花費(fèi)在校準(zhǔn)引擎啟動(dòng)的情況下,內(nèi)燃機(jī)啟動(dòng)噪聲可以被理想地掩蓋, 這意味著有足夠多的背景噪聲與頻譜含量匹配的內(nèi)燃機(jī)噪聲,并且內(nèi)燃機(jī)是在操作足夠安靜的條件下啟動(dòng)的。要在后期開發(fā)階段為內(nèi)燃機(jī)找到理想的情況可能會(huì)非常耗時(shí),所以最好將這一開發(fā)轉(zhuǎn)移到早期概念選擇階段,這就是模擬發(fā)揮作用的地方。
通過使用仿真技術(shù)可以評(píng)估P2-DCT、PS、DHT等不同混合概念的NVH行為。利用本文提出的聲學(xué)仿真技術(shù),可以使結(jié)果聽得見,以考慮主觀的聲音印象,這對(duì)于在混合動(dòng)力汽車開發(fā)過程中指導(dǎo)管理決策和作出相應(yīng)的反應(yīng)是非常有用的。
該方法將模擬的混合動(dòng)力汽車內(nèi)部噪聲分為三部分:內(nèi)燃機(jī)噪聲、電動(dòng)機(jī)噪聲和背景噪聲。每個(gè)組件都是合成使用噪聲和正弦發(fā)生器,以實(shí)現(xiàn)最大的靈活性和廣泛的適用性。
本文提出了一個(gè)軟件工具鏈,它包括一個(gè)用于單個(gè)組件參數(shù)的預(yù)設(shè)器,一個(gè)作為靈活可用計(jì)算核心的聲音生成引擎,以及一個(gè)圖形用戶界面(GUI),用于根據(jù)生成的預(yù)設(shè)和定義的駕駛情況創(chuàng)建最終的wav文件。
2. 方法
在開發(fā)混合動(dòng)力電動(dòng)汽車時(shí),有不同的概念需要考慮。一般概念可以是并聯(lián)式混合動(dòng)力,其中電動(dòng)發(fā)動(dòng)機(jī)可以單獨(dú)或與內(nèi)燃機(jī)一起驅(qū)動(dòng)車輛;串聯(lián)式混合動(dòng)力,其中內(nèi)燃機(jī)用于為蓄電池充電;或者是功率分配概念,其中發(fā)動(dòng)機(jī)和電動(dòng)馬達(dá)的功率可以使用行星齒輪等共享。最常見的概念如圖1所示。這些概念在二氧化碳排放、成本、駕駛性能和NVH方面都有一定的優(yōu)勢(shì)和劣勢(shì)。前一個(gè)主題已經(jīng)在模擬環(huán)境中得到了解決,而NVH通常在混合概念確定后的開發(fā)階段進(jìn)行評(píng)估。然而,由于混合動(dòng)力汽車被許多客戶認(rèn)為是最先進(jìn)的產(chǎn)品,高度完善的NVH行為也同樣被期待。此外,與傳統(tǒng)設(shè)計(jì)相比,混合動(dòng)力概念車往往會(huì)帶來更多NVH問題。主要噪聲源是內(nèi)燃機(jī)、電動(dòng)機(jī)和風(fēng)/滾動(dòng)噪聲。仿真的一種方法是建立每個(gè)噪聲源的物理模型,將產(chǎn)生的噪聲與模擬的車輛傳遞路徑相乘。這種方法將意味著巨大的模擬工作和非常復(fù)雜的數(shù)學(xué)運(yùn)算,這將增加開發(fā)時(shí)間和成本。在這里提出的方法中,進(jìn)一步深入車輛,只關(guān)注車內(nèi)噪聲結(jié)果(包括傳遞路徑),而不是噪聲源。
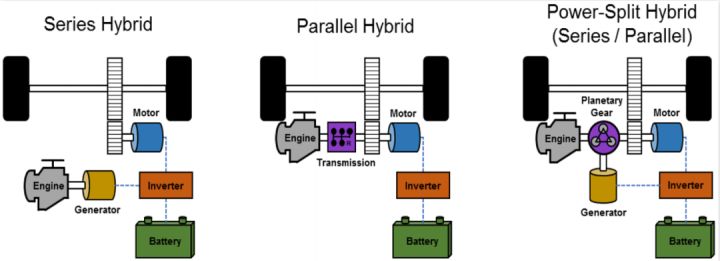
圖1 HEV變速器概念
如果我們想模擬/合成一個(gè)類似于汽車內(nèi)部的噪聲源,我們需要這個(gè)噪聲源是如何組成的信息(例如對(duì)于內(nèi)燃機(jī)來說,哪個(gè)發(fā)動(dòng)機(jī)的指令涉及到發(fā)動(dòng)機(jī)的主導(dǎo)地位)。在模擬過程中,車輛仍處于開發(fā)階段,現(xiàn)實(shí)世界的測量數(shù)據(jù)很可能無法作為分析的來源。因此,該方法使用可比較的車輛基準(zhǔn)數(shù)據(jù)來提取該信息。
這些基準(zhǔn)測量通常包括至少一次滿載試運(yùn)行,一次半載試運(yùn)行和一次滑行。這里的假設(shè)是,根據(jù)車輛和發(fā)動(dòng)機(jī)類別,通過分析數(shù)據(jù)庫中現(xiàn)有的測量數(shù)據(jù),可以以足夠精確的方式近似得出車輛噪聲源的基本特征。
例如,如果一輛開發(fā)中的汽車在一輛緊湊型汽車上配備了一個(gè)4缸渦輪增壓汽油發(fā)動(dòng)機(jī),那么在數(shù)據(jù)庫中很可能已經(jīng)有了可比較的實(shí)際測量數(shù)據(jù),可以用來在模擬中重建內(nèi)部噪聲。如果數(shù)據(jù)庫中沒有特定的車輛配置,則需要對(duì)該配置進(jìn)行測量(例如,如果該配置為3缸車輛,而數(shù)據(jù)庫中沒有該車輛,則可以將3缸車輛的測量值添加到數(shù)據(jù)庫中)?;蛘呖赡軙?huì)有一個(gè)類似的配置,其聲音效果與開發(fā)中的類似。這可能是一些小的差異,比如車輛等級(jí)(小型或緊湊型)稍有不同。哪種配置被認(rèn)為是可比較的或至少是可接受的,這取決于模擬結(jié)果所需的精度,應(yīng)由聲學(xué)專家作出決定。
用類似的方法,可以使用已經(jīng)測量過的類似配置來近似地計(jì)算其他噪聲分量。在數(shù)據(jù)庫中找到類似聲音的電動(dòng)馬達(dá),它的一個(gè)選擇標(biāo)準(zhǔn)可能是電力。而風(fēng)/滾動(dòng)噪聲主要由車輛的隔聲性、輪胎類型和車輛的重量來定義,如果這些參數(shù)匹配到一定程度,聲學(xué)結(jié)果也會(huì)相似。顯然,模擬結(jié)果將是一種估算,其準(zhǔn)確性取決于從數(shù)據(jù)庫中選擇的車輛與模擬開發(fā)車輛的匹配程度。
另一方面,目標(biāo)結(jié)果是在早期開發(fā)階段評(píng)估不同的混合動(dòng)力概念。在很多情況下,確切的底盤/引擎配置甚至在這一點(diǎn)上都不知道。然而,燃料消耗已經(jīng)完成WLTP循環(huán)評(píng)估,并提供包含NVH考慮因素的措施對(duì)整個(gè)開發(fā)過程將是一個(gè)巨大的好處,因?yàn)樵谔囟〞r(shí)間段內(nèi)啟動(dòng)ICE產(chǎn)生噪聲的數(shù)量有時(shí)會(huì)被認(rèn)為太煩人(見圖2)。

圖2 內(nèi)燃機(jī)啟動(dòng)時(shí)的WLTP循環(huán)
3. 目標(biāo)設(shè)定和評(píng)價(jià)標(biāo)準(zhǔn)
為了對(duì)混合動(dòng)力汽車的NVH行為進(jìn)行中立和非主觀的評(píng)價(jià),需要以客觀的方式定義目標(biāo)和評(píng)價(jià)標(biāo)準(zhǔn)。如前所述,這些指標(biāo)和評(píng)價(jià)標(biāo)準(zhǔn)與混合動(dòng)力概念和車輛類別密切相關(guān)。另一個(gè)影響因素是運(yùn)行策略。運(yùn)行策略的定義和優(yōu)化是在不同的目標(biāo)之間找到最佳的折衷辦法以達(dá)到最高的效率。然而,如果運(yùn)行策略需要大量的內(nèi)燃機(jī)啟動(dòng)和停止,或者如果有太多像內(nèi)燃機(jī)的突然負(fù)載或速度增加的意外等,NVH行為和駕駛舒適性可能是不可接受的。但是如何定義這個(gè)標(biāo)準(zhǔn)呢?
要回答這個(gè)問題,重要的是要知道被認(rèn)為是不可接受的或令人討厭的影響或運(yùn)行模式。通常,電動(dòng)模式和內(nèi)燃機(jī)模式之間的差異以及車內(nèi)噪聲和振動(dòng)水平的相關(guān)變化是人們關(guān)注的主要問題。因此,本研究選擇的用于客觀評(píng)價(jià)NVH準(zhǔn)則為室內(nèi)噪聲水平增加和整體噪聲水平。首先,重要的是要找出并理解在純電動(dòng)運(yùn)行和內(nèi)燃機(jī)運(yùn)行中的內(nèi)部噪聲水平有什么不同。因此,對(duì)不同車型的車內(nèi)噪聲水平進(jìn)行了基準(zhǔn)評(píng)估,以確定在選定的運(yùn)行條件下的典型范圍。這對(duì)穩(wěn)態(tài)操作和瞬態(tài)操作都適用。結(jié)果如圖3和圖4所示。
圖3中的穩(wěn)態(tài)結(jié)果顯示了靜止(低怠速)、30kph、50kph、70kph和100kph時(shí)副駕駛位置的內(nèi)部噪聲水平。負(fù)載由相應(yīng)車速下的需求給出??梢姡妱?dòng)汽車和內(nèi)燃機(jī)汽車最大的區(qū)別是速度范圍較低。這里可以看到車輛內(nèi)部噪音水平的差異。在更高的速度下,例如100公里每小時(shí)的速度下,車內(nèi)噪音水平幾乎是相似的。換句話說,主要關(guān)注的關(guān)鍵領(lǐng)域是在中等或低負(fù)荷需求下的較低車速。

圖3 噪聲水平與噪聲水平增加穩(wěn)定比較
圖4顯示了與特定車速下的EV高負(fù)荷、EV部分負(fù)荷加速和EV恒定行駛相比,針對(duì)相同車輛類別的基準(zhǔn)研究結(jié)果,以及ICE2檔高負(fù)荷加速和3檔高負(fù)荷加速的瞬態(tài)車內(nèi)噪聲級(jí)散射帶。在這里可以清楚地看到,噪音水平增加約10至12分貝,從恒定的電動(dòng)驅(qū)動(dòng)或電動(dòng)部分負(fù)載到ICE運(yùn)行與高負(fù)載要求在2檔。這是NVH的關(guān)鍵和不可接受的。從電動(dòng)汽車驅(qū)動(dòng)或電動(dòng)汽車部分負(fù)載到三檔高負(fù)載要求的內(nèi)燃機(jī)運(yùn)行的噪聲水平增加顯著降低,約為5db。這仍然是一個(gè)增長,但它被認(rèn)為是NVH的邊界,結(jié)合適當(dāng)?shù)牟僮鞑呗院碗S著時(shí)間的負(fù)荷增加,它可以發(fā)展為可接受的。

圖4 噪聲水平與噪聲水平增加瞬態(tài)比較
綜上所述,研究表明,與發(fā)動(dòng)機(jī)轉(zhuǎn)速增加相關(guān)的噪聲水平增加比負(fù)載增加引起的噪聲水平增加更為關(guān)鍵。圖5顯示了一個(gè)比較。這里的圖表顯示了發(fā)動(dòng)機(jī)轉(zhuǎn)速增加1000rpm與負(fù)載增加超過發(fā)動(dòng)機(jī)轉(zhuǎn)速(空載到最大負(fù)載) 的影響。評(píng)估不同混合概念的NVH標(biāo)準(zhǔn)與噪聲水平增加的要求被設(shè)定為低于3 dB。此外,發(fā)動(dòng)機(jī)啟動(dòng)/停止的次數(shù)以及ICE負(fù)荷和速度坡道的也被考慮在評(píng)估中。
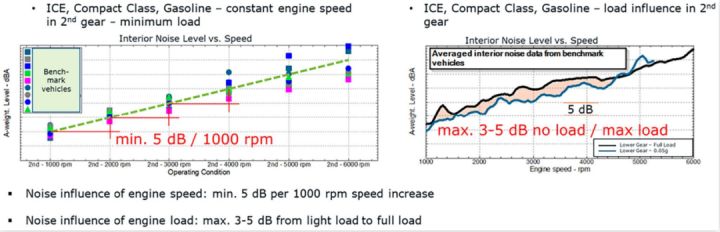
圖5 速度增加與負(fù)載增加的影響
4. E-Sould系統(tǒng)
E-Sound引擎是一個(gè)非常靈活的工具,由純數(shù)據(jù)(PD)補(bǔ)丁組成,如圖6所示。

圖6 純數(shù)據(jù)(PD)環(huán)境,E-Sound補(bǔ)丁摘錄
可嵌入的實(shí)時(shí)編程環(huán)境可以運(yùn)行在Windows、OSX和Linux上,也可以嵌入在c代碼中,用作黑盒來創(chuàng)建基于信號(hào)輸入的所需輸出。它的顯著優(yōu)點(diǎn)是,同樣的聲音引擎可以作為.NET應(yīng)用程序的計(jì)算核心,也可以作為運(yùn)行在嵌入式設(shè)備硬件上的人工聲音生成演示車的核心。因此,在使用基于E-Sound的軟件或駕駛基于E-Sound的演示車時(shí),不需要為不同的應(yīng)用程序維護(hù)單獨(dú)的軟件,也可以即時(shí)進(jìn)行更改。通過網(wǎng)絡(luò)消息與其他軟件或接口進(jìn)行通信。發(fā)動(dòng)機(jī)轉(zhuǎn)速、扭矩等信息可以來自can接口、MATLAB或任何其他軟件輸入。
對(duì)于聲音的產(chǎn)生,使用兩個(gè)具有64個(gè)振蕩器的加法合成模塊,用預(yù)設(shè)文件中指定的幅度合成整個(gè)發(fā)動(dòng)機(jī)轉(zhuǎn)速范圍的0.5到32階。根據(jù)發(fā)動(dòng)機(jī)轉(zhuǎn)速和扭矩,每個(gè)振蕩器的振幅是相應(yīng)調(diào)整的。每個(gè)振蕩器由頻率、增益、振幅調(diào)制和相位調(diào)制參數(shù)化。其中一個(gè)模塊基于(Frank, Sontacchi, Brandl, &H?ldrich, 2014)中介紹的方法。
第三個(gè)模塊負(fù)責(zé)背景噪聲,它只依賴于車速和噪聲參數(shù)。這些參數(shù)構(gòu)成了不同車速下噪聲的頻譜含量和振幅。這是通過頻率、增益和q參數(shù)化的帶通濾波器和均衡濾波器實(shí)現(xiàn)的。濾波器組的參數(shù)輸入是通過分析類似的底盤配置的現(xiàn)有的測量值來定義的,如第二章所述。
5. 仿真軟件工具鏈
5.1 聲音模擬
核心模擬是在一個(gè)易于使用的GUI中完成的,其主要窗口如圖7所示。它的特點(diǎn)是在第4章中描述的E-Sound引擎創(chuàng)建一個(gè)預(yù)設(shè)文件的wave文件,這是作為軟件的輸入。該軟件最初的開發(fā)目的是使模擬輸出可聽見,它能夠使用任何符合定義結(jié)構(gòu)的MATLAB文件,并包括必要的驅(qū)動(dòng)參數(shù)作為輸入文件。

圖7 聲音模擬器GUI
理論上,E-Sound引擎也可以作為獨(dú)立的專業(yè)工具使用。有了用戶界面,模擬對(duì)每個(gè)用戶來說都是可訪問和易于使用的。即使是用戶對(duì)聲學(xué)一無所知的情況下也可以很好使用,因?yàn)轭A(yù)設(shè)仍然是由聲學(xué)工程師提供的。
內(nèi)燃機(jī)和電動(dòng)發(fā)動(dòng)機(jī)的預(yù)設(shè)值不僅適用于完全相同的車輛配置,而且也適用于其他發(fā)動(dòng)機(jī)和底盤組合的類似配置,因此這些預(yù)設(shè)文件中的發(fā)動(dòng)機(jī)轉(zhuǎn)速和扭矩通常在0到1的標(biāo)準(zhǔn)化范圍內(nèi)。因此,GUI提供了將這個(gè)規(guī)范化范圍映射到模擬發(fā)動(dòng)機(jī)配置范圍的可能性。這些參數(shù)的輸入可以從預(yù)期的模擬電機(jī)中獲取,也可以根據(jù)車輛的行駛循環(huán)進(jìn)行估算。如果ICE/E-motor配置未知,則提交mat文件。
校準(zhǔn)功能最終允許創(chuàng)建標(biāo)準(zhǔn)化(自動(dòng)校準(zhǔn))或用戶校準(zhǔn)的輸出文件,這使得不同預(yù)設(shè)或駕駛周期的水平正確的比較成為可能。
5.2 預(yù)設(shè)器
為了創(chuàng)建聲音預(yù)設(shè),我們開發(fā)了一個(gè)基于MATLAB的軟件工具(見圖8)。
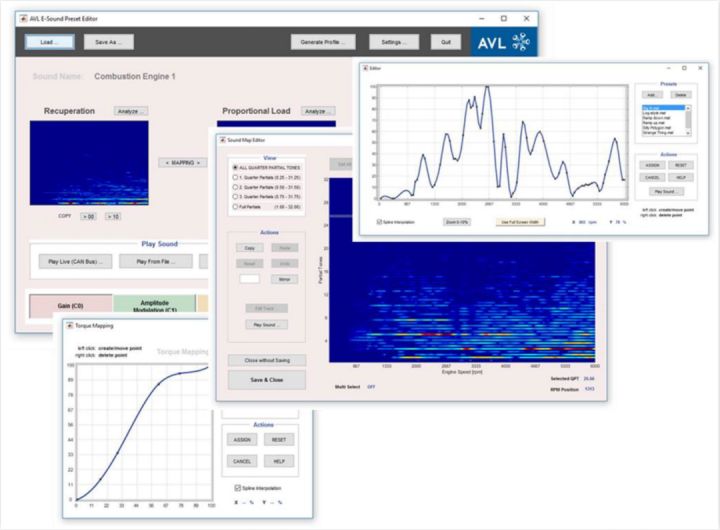
圖8 E-Sound預(yù)設(shè)器
使用與其他應(yīng)用程序相同的E-Sound引擎來播放創(chuàng)建的預(yù)設(shè)聲音。目前,預(yù)設(shè)器用于創(chuàng)建內(nèi)燃機(jī)和電機(jī)預(yù)設(shè),一個(gè)包含的工具的背景噪音與一個(gè)可能的自動(dòng)化分析算法,計(jì)劃在未來的升級(jí)。器由顯示3種主要工況并可進(jìn)行測量分析的主窗口、每個(gè)工況的詳細(xì)順序器和幾個(gè)插值和回放窗口組成??梢允褂肕ATLAB編譯器,該應(yīng)用程序也可以編譯為一個(gè)獨(dú)立的可執(zhí)行文件,這使MATLAB許可證并不是強(qiáng)制性的。
6. 預(yù)設(shè)生成
6.1 內(nèi)燃機(jī)
內(nèi)燃機(jī)車內(nèi)聲音的訂單模式非常復(fù)雜,通常涉及的訂單很多,以至于“從頭開始”的訂單模式設(shè)計(jì)將非常耗時(shí),即使對(duì)于經(jīng)驗(yàn)豐富的聲學(xué)工程師來說也是如此。因此,利用預(yù)置器軟件的自動(dòng)分析功能,對(duì)現(xiàn)有的由滿載運(yùn)行、半載運(yùn)行和滑行組成的測量裝置進(jìn)行分析。使用(Tuma, 2005)和(Vold & Leuridan, 1995)中提出的第二代Vold- kalman濾波器和低頻去噪器提取階數(shù)。
最終聲音的微調(diào)是手工完成的。對(duì)于這種微調(diào),軟件中提供了不同的工具,包括單個(gè)訂單、選擇多個(gè)訂單、頻率過濾器、全局增益過濾器和鏡像功能,如果測量不包括整個(gè)發(fā)動(dòng)機(jī)轉(zhuǎn)速范圍,該功能可以在定義的發(fā)動(dòng)機(jī)轉(zhuǎn)速下鏡像訂單模式的一部分。三種負(fù)載條件(滿載、部分負(fù)載和恢復(fù))之間的扭矩插值也可以在軟件中定義,以實(shí)現(xiàn)模擬發(fā)動(dòng)機(jī)更具運(yùn)動(dòng)性或更豪華的聲音性能。
6.2 電動(dòng)機(jī)
對(duì)于電動(dòng)馬達(dá)和內(nèi)燃機(jī),預(yù)設(shè)產(chǎn)生的原理是一樣的,但是對(duì)于電動(dòng)馬達(dá)預(yù)設(shè),需要更多的人為操作。一般來說,它與內(nèi)燃機(jī)預(yù)設(shè)有兩個(gè)主要的區(qū)別:
?這些指令更加孤立,因此聽起來比內(nèi)燃機(jī)的聲音更有音調(diào)。
?訂單模式?jīng)]有內(nèi)燃機(jī)復(fù)雜。整體的聲音是非常干凈的,通常沒有粗糙的感覺。
因此,對(duì)現(xiàn)有測量數(shù)據(jù)的自動(dòng)分析并不適合于電動(dòng)發(fā)動(dòng)機(jī)。相反,測量結(jié)果必須由聲學(xué)工程師進(jìn)行分析,并且必須從頻譜中導(dǎo)出孤立的單階,然后在預(yù)設(shè)的軟件中重建。在大多數(shù)情況下,在零載和恢復(fù)條件下行駛時(shí),可聽到的電噪聲都很低,所以主要工作都是在滿載狀態(tài)下進(jìn)行的,而在低負(fù)荷載重條件時(shí),可聽到的噪聲通常限制在較小的發(fā)動(dòng)機(jī)轉(zhuǎn)速范圍內(nèi)。
6.3 風(fēng)/滾動(dòng)噪聲
為了在汽車內(nèi)部獲得真實(shí)的聲音印象,道路和風(fēng)噪聲也必須合成。這種噪聲產(chǎn)生的基礎(chǔ)是白噪聲發(fā)生器和濾波網(wǎng)絡(luò),它的振幅和拐角頻率隨著車輛速度的變化而變化,形成與目標(biāo)車輛相似的光譜組成。原理如圖9所示。
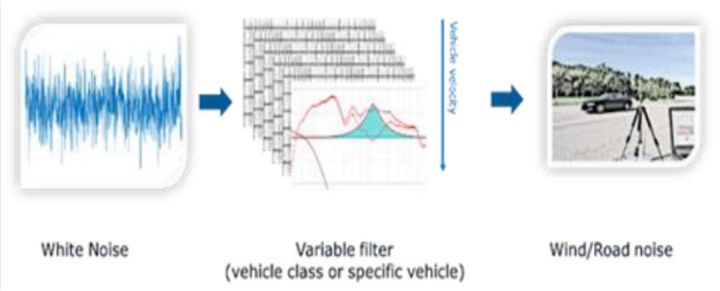
圖9 風(fēng)/滾動(dòng)噪聲生成
由于目前還沒有自動(dòng)分析算法,這種濾波器的設(shè)計(jì)必須使用現(xiàn)有測量值的光譜分析手工完成。然后將濾波器參數(shù)存儲(chǔ)在一個(gè)矩陣中,該矩陣可以傳遞給仿真軟件。
7. 案例研究
本文提出的仿真工具鏈的初衷是為了能夠快速有效地對(duì)混合動(dòng)力汽車的不同傳動(dòng)概念進(jìn)行主觀評(píng)價(jià)。然而,對(duì)工具鏈的客觀評(píng)價(jià)潛力進(jìn)行了評(píng)價(jià)。出于這個(gè)原因,對(duì)一輛已經(jīng)基準(zhǔn)的混合動(dòng)力汽車進(jìn)行了一個(gè)案例研究,以顯示在理想條件下,仿真可以在多大程度上接近基準(zhǔn)汽車的實(shí)測聲音。
在0.2g的恒定負(fù)載下行駛時(shí),基準(zhǔn)車在達(dá)到約30 km / h時(shí)啟動(dòng)內(nèi)燃機(jī)(見圖10)。

圖10 ICE啟動(dòng)后水平增加
根據(jù)圖11中的經(jīng)驗(yàn)數(shù)據(jù),可以猜測此時(shí)的水平增長可能有問題。測量結(jié)果顯示,級(jí)別確實(shí)增加了3-4dBA以上,這在大多數(shù)應(yīng)用程序中被認(rèn)為是至關(guān)重要的。
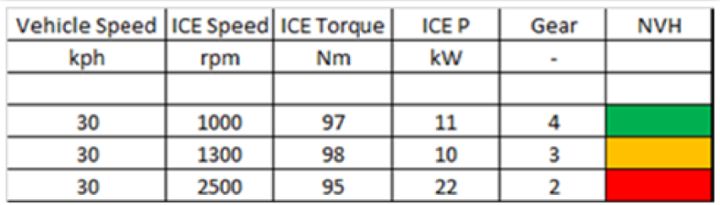
圖11 ICE啟動(dòng)噪聲質(zhì)量預(yù)期影響的經(jīng)驗(yàn)數(shù)據(jù)
由于基準(zhǔn)車也可以在純電動(dòng)和純ICE模式下行駛,因此我們?cè)谲噧?nèi)對(duì)這兩種駕駛模式下的全負(fù)荷和部分負(fù)荷的累計(jì)和滑行進(jìn)行了測量。通過對(duì)內(nèi)燃機(jī)測量數(shù)據(jù)的自動(dòng)分析,使用預(yù)置器進(jìn)行了內(nèi)燃機(jī)預(yù)置。通過分析E-Mode測量中最主要的階數(shù),推導(dǎo)出一種電動(dòng)馬達(dá)預(yù)設(shè)用于仿真。對(duì)于背景噪聲預(yù)設(shè),選擇了電動(dòng)模式低負(fù)載運(yùn)行測量,因?yàn)榛鶞?zhǔn)車在低負(fù)載行駛時(shí),電動(dòng)模式的噪聲幾乎是聽不見的,因此該測量可以提供最干凈的背景噪聲圖像。然后將振幅倍增值和角頻輸入可變?yōu)V波器,根據(jù)車速重建背景噪聲測量的頻譜內(nèi)容。
仿真結(jié)果如圖12所示。仿真和測量都表明,與E-Mode運(yùn)行相比,ICE啟動(dòng)后的體積增加略高。測量和模擬的頻譜也很相似。如果預(yù)設(shè)值被仔細(xì)匹配,模擬工具鏈可以提供一個(gè)有用的特征,以絕對(duì)聲壓級(jí)來估計(jì)NVH行為。

圖12 仿真結(jié)果
內(nèi)燃機(jī)在不同車速和發(fā)動(dòng)機(jī)轉(zhuǎn)速下啟動(dòng)時(shí),也應(yīng)考慮屏蔽頻率的現(xiàn)象,因?yàn)槠渌肼暢煞值哪骋活l譜含量會(huì)比其他頻譜成分更容易屏蔽燃燒噪聲。
根據(jù)經(jīng)驗(yàn)數(shù)據(jù),可以實(shí)施客觀規(guī)則來決定在某種駕駛條件下是否可以接受噪音水平的增加。
8.結(jié)論
本文提出了一個(gè)非常靈活的軟件工具鏈,可以在確定特定發(fā)動(dòng)機(jī)/底盤配置之前就可以聽到車輛內(nèi)部噪音。該技術(shù)可應(yīng)用于電動(dòng)、混合動(dòng)力或傳統(tǒng)內(nèi)燃機(jī)車輛。使用基準(zhǔn)數(shù)據(jù)庫,模擬車輛的發(fā)動(dòng)機(jī)/底盤配置在最短的時(shí)間內(nèi)近似模擬出具有可能的最高音頻輸出質(zhì)量(真實(shí)聲音)。
通過一個(gè)案例研究,展示了該軟件在模擬內(nèi)燃機(jī)啟動(dòng)時(shí)的聲壓級(jí)估計(jì)和噪聲質(zhì)量影響評(píng)估方面的潛力。它已經(jīng)表明,與理想匹配的預(yù)設(shè)配置,產(chǎn)生的內(nèi)部噪聲可以模擬大約±1分貝。
作為未來的大綱,計(jì)劃使用更多的自動(dòng)分析功能。由于電動(dòng)汽車是一個(gè)不斷增長的趨勢(shì),將有一些努力來創(chuàng)建電動(dòng)汽車測量的分析算法,該算法可以提取在滿載運(yùn)行時(shí)可聽到的主要指令。將開發(fā)第二種算法來分析背景噪聲,其方式是自動(dòng)檢測特定車輛或車輛類別的風(fēng)和滾動(dòng)噪聲模塊的濾波器參數(shù)。這些功能將包含在預(yù)設(shè)器中,以便在一個(gè)軟件產(chǎn)品中預(yù)設(shè)所有相關(guān)功能。最后,還可以評(píng)估頻率屏蔽的數(shù)量,從而形成一個(gè)客觀的標(biāo)準(zhǔn),以判斷客戶對(duì)ICE啟動(dòng)測量的NVH接受程度。通過這些擴(kuò)展,工具鏈甚至可以擴(kuò)大其應(yīng)用范圍,從最初的主觀評(píng)估工具,到一個(gè)客觀的混合動(dòng)力汽車仿真軟件。
文章來源:Langjahr, P., Resch, M., and Graf, B., “HEV evaluation in Simulation Phase based on Predicted Sound Behavior,” SAE Technical Paper 2020-01-1511, 2020, doi:10.4271/2020-01-1511.
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 125



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
