




 廣告
廣告





















































基于輪胎穩(wěn)態(tài)和瞬態(tài)特性的車輛響應(yīng)研究
2021-09-12 22:07:00· 來源:輪胎動力學(xué)協(xié)同創(chuàng)新聯(lián)盟訂閱號 作者:李雪莉

在整車動力學(xué)正向研究過程中,將用戶要求轉(zhuǎn)化為工程語言的整車技術(shù)規(guī)范(VTS),并分解為系統(tǒng)特性是車輛性能目標(biāo)達(dá)成的關(guān)鍵,也是車輛生產(chǎn)的核心技術(shù)。輪胎作為
在整車動力學(xué)正向研究過程中,將用戶要求轉(zhuǎn)化為工程語言的整車技術(shù)規(guī)范(VTS),并分解為系統(tǒng)特性是車輛性能目標(biāo)達(dá)成的關(guān)鍵,也是車輛生產(chǎn)的核心技術(shù)。輪胎作為整車動力學(xué)達(dá)標(biāo)與否的關(guān)鍵部件[1],其性能與控制主要依托于主觀評價,隨著正向開發(fā)流程的發(fā)展和完善,整車動力學(xué)VTS目標(biāo)的量化使得輪胎客觀指標(biāo)的設(shè)定成為可能,可有效形成輪胎性能開發(fā)的主客觀閉環(huán)。
目前,如何在概念階段設(shè)計(jì)與實(shí)現(xiàn)輪胎客觀指標(biāo),進(jìn)行整車動力學(xué)性能綜合與分解的迭代,從而使整車動力學(xué)性能達(dá)標(biāo)是擺在仿真工程師面前的難題。本工作通過對輪胎穩(wěn)態(tài)和瞬態(tài)特性研究,建立基于輪胎穩(wěn)態(tài)和瞬態(tài)特性的三自由度車輛模型,揭示了輪胎特性與整車動力學(xué)性能的關(guān)系,為輪胎性能目標(biāo)的控制與優(yōu)化提供理論指導(dǎo)。
1 輪胎穩(wěn)態(tài)和瞬態(tài)特性
1. 1輪胎力學(xué)特性主要參數(shù)
輪胎力學(xué)特性研究輪胎受力與運(yùn)動狀態(tài)之間的關(guān)系,其主要參數(shù)有輸入?yún)?shù)和輸出參數(shù)兩類[2]。主要輸入?yún)?shù)包括縱向滑移率(κ)、滾動速度(Ω)、側(cè)偏角(α)、偏轉(zhuǎn)角(ψ)、外傾角(γ)和垂向力(Fz),主要輸出參數(shù)包括縱向力(Fx)、側(cè)向力(Fy)、翻傾力矩(Mx)、滾動阻力矩(My)和回正力矩(Mz),其中與底盤動力學(xué)直接相關(guān)的是Fy和Mz,而Fx和Fz對Fy間接產(chǎn)生作用,進(jìn)而影響車輛的運(yùn)動。
1. 2輪胎穩(wěn)態(tài)特性
1. 2. 1輪胎穩(wěn)態(tài)刷子模型
輪胎穩(wěn)態(tài)刷子模型不考慮胎體變形[3],將輪胎等效為剛性胎體和彈性胎面兩部分。在純側(cè)偏工況下,輪胎接地印痕區(qū)內(nèi)胎面單元變形如圖1所示。圖中,V為輪胎接地印痕區(qū)接地中心(C點(diǎn))速度,a為半印痕長度,α為V與胎體中心基準(zhǔn)線間的夾角,ν為印痕區(qū)微元速度,νmax為印痕區(qū)微元最大速度。
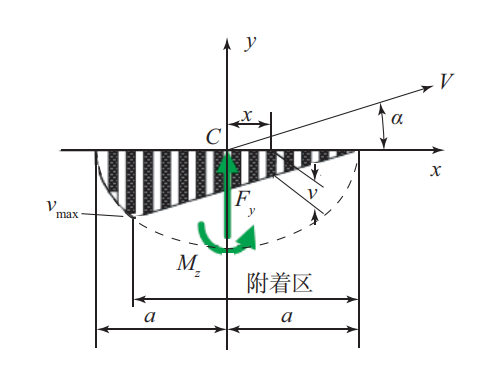
圖1 純側(cè)偏工況下輪胎接地印痕區(qū)胎面單元變形示意
假設(shè)α輸入無窮小或路面摩擦因數(shù)趨向無限大,可以認(rèn)為整個接地印痕區(qū)都為附著區(qū),胎面單元不發(fā)生滑移[4]。對接地印痕區(qū)積分,可得到Fy和Mz:

式中,qy(x)為側(cè)向力分布函數(shù)。
輪胎穩(wěn)態(tài)刷子模型純側(cè)偏工況下Fy和Mz與α的關(guān)系如圖2所示。
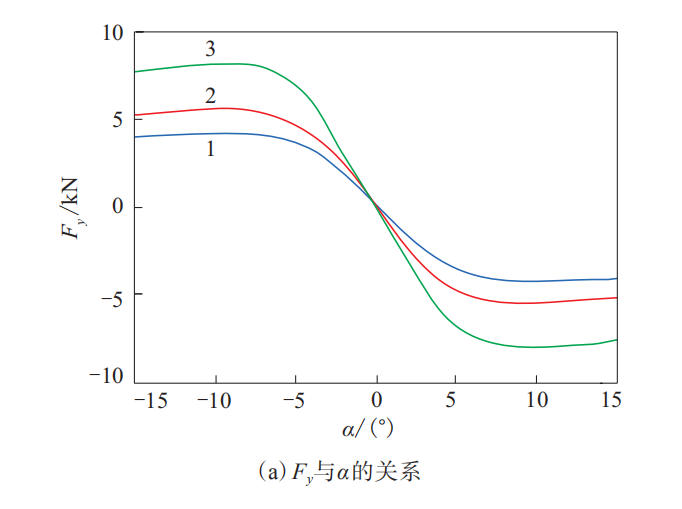
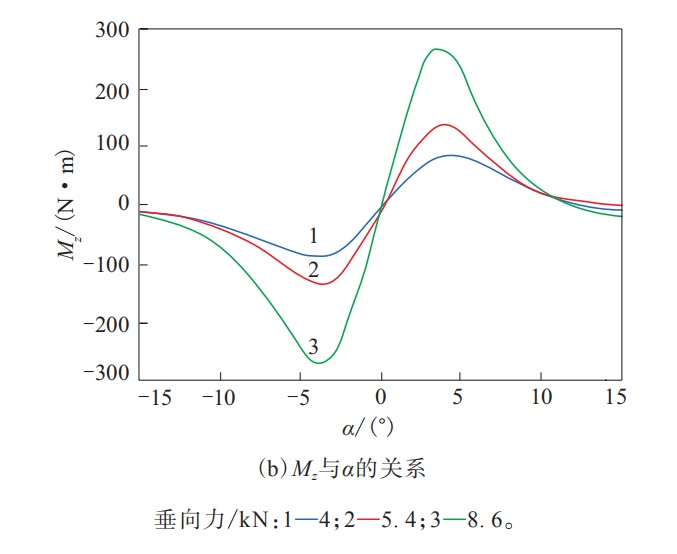
圖2 輪胎穩(wěn)態(tài)刷子模型純側(cè)偏工況下Fy和Mz與α的關(guān)系
1. 2. 2輪胎側(cè)傾
當(dāng)車輪存在γ時(見圖3),車輪會發(fā)生繞自身旋轉(zhuǎn)軸線與地面交點(diǎn)滾動的趨勢,在寬度方向可以把輪胎看作由無數(shù)個無厚度圓盤重疊而成。在輪胎中心平面內(nèi)的圓盤在法向和側(cè)向的變形分別為Δz和Δy。由于存在側(cè)向變形,純側(cè)傾運(yùn)動時會產(chǎn)生側(cè)向力Fyγ和回正力矩Mzγ(下標(biāo)γ指產(chǎn)生力的原因)。
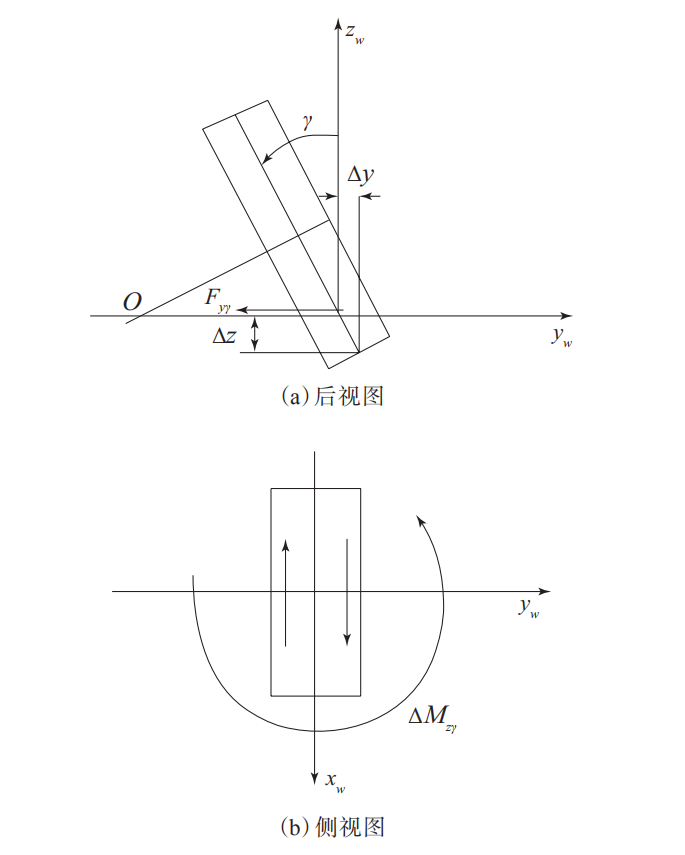
圖3 輪胎純側(cè)傾工況示意



 廣告
廣告 
最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
