




 廣告
廣告





















































基于非線性擾動(dòng)觀測(cè)的商用車ESC自適應(yīng)滑??刂蒲芯?/h1>
2021-09-15 01:15:30· 來源:汽車制動(dòng)之家
根據(jù) Lyapunov穩(wěn)定性理論,,選取 Lyapunov函數(shù):

對(duì)Lyapunov函數(shù)求導(dǎo),可得

定義區(qū)域Q為

由式(28)可知,對(duì)于任意 e∈R\Q,即
時(shí),式(29)有
,這意味著非線性擾動(dòng)觀測(cè)器偏差e1將會(huì)收斂并一直留在區(qū)域Q內(nèi)。綜合式(19)~式(29),最終得到的附加橫擺力矩控制器為

由式(30)可知,基于非線性擾動(dòng)觀測(cè)器設(shè)計(jì)的附加橫擺力矩控制器僅需滿足k>0,ε>0即可,而式(19)中的附加橫擺力矩控制器需滿足ε≥D才可保證系統(tǒng)的穩(wěn)定性。綜上所述,在滿足相同控制需求的條件下,基于非線性擾動(dòng)觀測(cè)的附加橫擺力矩控制器的符號(hào)函數(shù)增益ε可取更小的值,從而使得式(30)控制器相對(duì)于式(19)控制器而言,抖振更小,控制精度更高。
在滑??刂破髦校瑓?shù)k與滑??刂频内吔俣让芮邢嚓P(guān),RBF神經(jīng)網(wǎng)絡(luò)具有自適應(yīng)調(diào)節(jié)能力,利用RBF神經(jīng)網(wǎng)絡(luò)控制器自適應(yīng)調(diào)節(jié)滑??刂破鲄?shù)k,可簡(jiǎn)化滑模控制器的參數(shù)調(diào)節(jié)過程,優(yōu)化滑模控制的響應(yīng)特性,減小系統(tǒng)抖振。RBF神經(jīng)網(wǎng)絡(luò)采用 2-5-1結(jié)構(gòu)。
RBF神經(jīng)網(wǎng)絡(luò)的輸入向量為
hj為隱含層第 j個(gè)神經(jīng)元的輸出,j=1,2,3,4,5。
c j=[cj1 cj2]為第j個(gè)隱含層神經(jīng)元的中心矢量值,bj>0為隱含層神經(jīng)元j的高斯基函數(shù)的寬度,其中神經(jīng)網(wǎng)絡(luò)的權(quán)值為ωj。
RBF神經(jīng)網(wǎng)絡(luò)輸出和逼近誤差指標(biāo)分別為


通過梯度下降法對(duì)RBF神經(jīng)網(wǎng)絡(luò)權(quán)、高斯基函數(shù)寬度、隱含層神經(jīng)元中心矢量值進(jìn)行調(diào)節(jié)。
權(quán)值變化、高斯基函數(shù)寬度參數(shù)變化、隱含層神經(jīng)元中心節(jié)點(diǎn)參數(shù)變化分別為
式中:i=1,2;η∈(0,1)為 RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)速率。
對(duì)于附加橫擺力矩采用單側(cè)制動(dòng)分配,具體邏輯見表1。
表1 單側(cè)制動(dòng)車輪選擇邏輯
表1中,LF、LR、RF、RR分別代表左前輪、左后輪、右前輪、右后輪。假設(shè)轉(zhuǎn)向盤左轉(zhuǎn)時(shí),δ≥0,當(dāng)橫擺角速度逆時(shí)針變化時(shí),ωrd和 ωr為正,Δωr=ωrd-ωr。
2.2 底層執(zhí)行機(jī)構(gòu)控制器
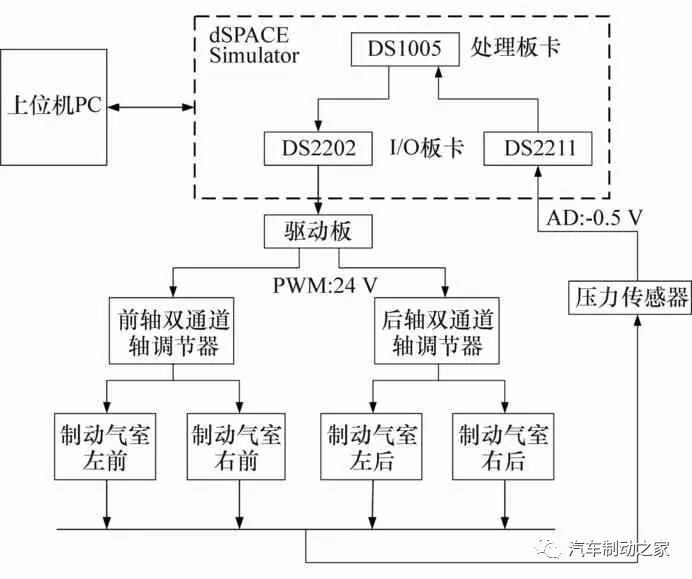
采用如圖3所示的電控氣壓制動(dòng)系統(tǒng)構(gòu)型作為商用車穩(wěn)定性控制的底層執(zhí)行機(jī)構(gòu)。
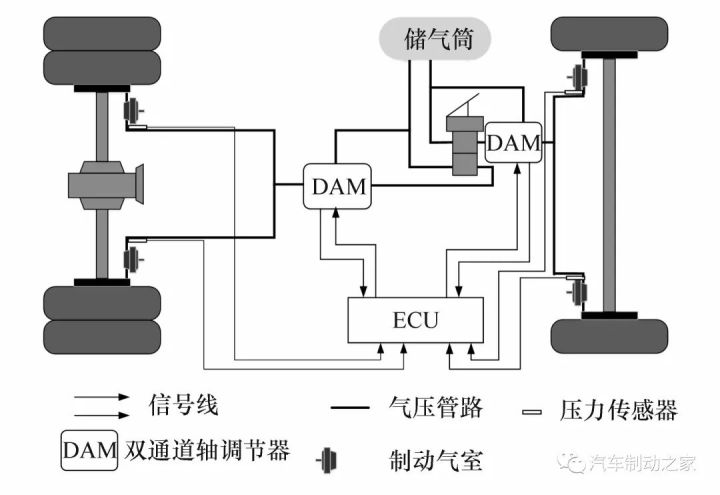
圖3 電控氣壓制動(dòng)系統(tǒng)構(gòu)型圖
電控氣壓制動(dòng)構(gòu)型的核心部件是由美國(guó)WABCO公司生產(chǎn)的最新一代雙通道軸調(diào)節(jié)器,其原理簡(jiǎn)圖如圖4所示。雙通道軸調(diào)節(jié)器左右兩側(cè)完全對(duì)稱,主要由增壓閥、減壓閥、備壓閥、繼動(dòng)閥、ECU組成。對(duì)于雙通道軸調(diào)節(jié)器主要是通過控制增壓閥、減壓閥的通斷來實(shí)現(xiàn)對(duì)壓力的精確控制。增壓閥和減壓閥本質(zhì)上是開關(guān)閥。
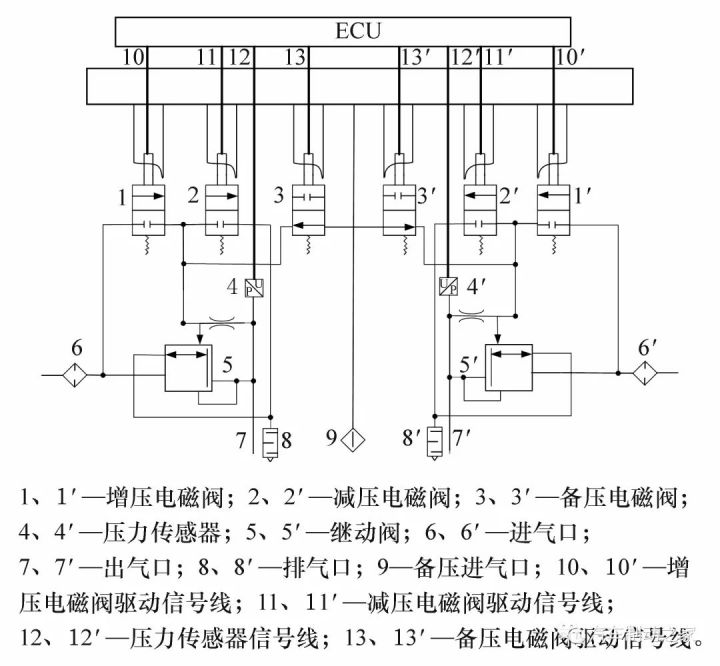
圖4 雙通道軸調(diào)節(jié)器原理簡(jiǎn)圖
單神經(jīng)元PID算法是通過對(duì)比例、積分和微分3個(gè)方面加權(quán)系數(shù)按照有監(jiān)督的Hebb算法進(jìn)行合理調(diào)節(jié)來實(shí)現(xiàn)系統(tǒng)控制的自適應(yīng)能力,并通過輸出的反饋實(shí)現(xiàn)權(quán)值實(shí)時(shí)最佳調(diào)整,使被控對(duì)象能夠逼近目標(biāo)值。單神經(jīng)元PID算法結(jié)構(gòu)簡(jiǎn)單,控制效果良好,是一種較好的不基于模型的算法,在實(shí)際工程中得到廣泛的應(yīng)用。故本文中對(duì)雙通道軸調(diào)節(jié)器采用單神經(jīng)元PID控制算法。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 65
2021-09-15 01:15:30· 來源:汽車制動(dòng)之家

根據(jù) Lyapunov穩(wěn)定性理論,,選取 Lyapunov函數(shù):
對(duì)Lyapunov函數(shù)求導(dǎo),可得
定義區(qū)域Q為
由式(28)可知,對(duì)于任意 e∈R\Q,即
時(shí),式(29)有
,這意味著非線性擾動(dòng)觀測(cè)器偏差e1將會(huì)收斂并一直留在區(qū)域Q內(nèi)。綜合式(19)~式(29),最終得到的附加橫擺力矩控制器為
由式(30)可知,基于非線性擾動(dòng)觀測(cè)器設(shè)計(jì)的附加橫擺力矩控制器僅需滿足k>0,ε>0即可,而式(19)中的附加橫擺力矩控制器需滿足ε≥D才可保證系統(tǒng)的穩(wěn)定性。綜上所述,在滿足相同控制需求的條件下,基于非線性擾動(dòng)觀測(cè)的附加橫擺力矩控制器的符號(hào)函數(shù)增益ε可取更小的值,從而使得式(30)控制器相對(duì)于式(19)控制器而言,抖振更小,控制精度更高。
在滑??刂破髦校瑓?shù)k與滑??刂频内吔俣让芮邢嚓P(guān),RBF神經(jīng)網(wǎng)絡(luò)具有自適應(yīng)調(diào)節(jié)能力,利用RBF神經(jīng)網(wǎng)絡(luò)控制器自適應(yīng)調(diào)節(jié)滑??刂破鲄?shù)k,可簡(jiǎn)化滑模控制器的參數(shù)調(diào)節(jié)過程,優(yōu)化滑模控制的響應(yīng)特性,減小系統(tǒng)抖振。RBF神經(jīng)網(wǎng)絡(luò)采用 2-5-1結(jié)構(gòu)。
RBF神經(jīng)網(wǎng)絡(luò)的輸入向量為
hj為隱含層第 j個(gè)神經(jīng)元的輸出,j=1,2,3,4,5。
c j=[cj1 cj2]為第j個(gè)隱含層神經(jīng)元的中心矢量值,bj>0為隱含層神經(jīng)元j的高斯基函數(shù)的寬度,其中神經(jīng)網(wǎng)絡(luò)的權(quán)值為ωj。
RBF神經(jīng)網(wǎng)絡(luò)輸出和逼近誤差指標(biāo)分別為
通過梯度下降法對(duì)RBF神經(jīng)網(wǎng)絡(luò)權(quán)、高斯基函數(shù)寬度、隱含層神經(jīng)元中心矢量值進(jìn)行調(diào)節(jié)。
權(quán)值變化、高斯基函數(shù)寬度參數(shù)變化、隱含層神經(jīng)元中心節(jié)點(diǎn)參數(shù)變化分別為
式中:i=1,2;η∈(0,1)為 RBF神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)速率。
對(duì)于附加橫擺力矩采用單側(cè)制動(dòng)分配,具體邏輯見表1。
表1 單側(cè)制動(dòng)車輪選擇邏輯
表1中,LF、LR、RF、RR分別代表左前輪、左后輪、右前輪、右后輪。假設(shè)轉(zhuǎn)向盤左轉(zhuǎn)時(shí),δ≥0,當(dāng)橫擺角速度逆時(shí)針變化時(shí),ωrd和 ωr為正,Δωr=ωrd-ωr。
2.2 底層執(zhí)行機(jī)構(gòu)控制器
采用如圖3所示的電控氣壓制動(dòng)系統(tǒng)構(gòu)型作為商用車穩(wěn)定性控制的底層執(zhí)行機(jī)構(gòu)。
圖3 電控氣壓制動(dòng)系統(tǒng)構(gòu)型圖
電控氣壓制動(dòng)構(gòu)型的核心部件是由美國(guó)WABCO公司生產(chǎn)的最新一代雙通道軸調(diào)節(jié)器,其原理簡(jiǎn)圖如圖4所示。雙通道軸調(diào)節(jié)器左右兩側(cè)完全對(duì)稱,主要由增壓閥、減壓閥、備壓閥、繼動(dòng)閥、ECU組成。對(duì)于雙通道軸調(diào)節(jié)器主要是通過控制增壓閥、減壓閥的通斷來實(shí)現(xiàn)對(duì)壓力的精確控制。增壓閥和減壓閥本質(zhì)上是開關(guān)閥。
圖4 雙通道軸調(diào)節(jié)器原理簡(jiǎn)圖
單神經(jīng)元PID算法是通過對(duì)比例、積分和微分3個(gè)方面加權(quán)系數(shù)按照有監(jiān)督的Hebb算法進(jìn)行合理調(diào)節(jié)來實(shí)現(xiàn)系統(tǒng)控制的自適應(yīng)能力,并通過輸出的反饋實(shí)現(xiàn)權(quán)值實(shí)時(shí)最佳調(diào)整,使被控對(duì)象能夠逼近目標(biāo)值。單神經(jīng)元PID算法結(jié)構(gòu)簡(jiǎn)單,控制效果良好,是一種較好的不基于模型的算法,在實(shí)際工程中得到廣泛的應(yīng)用。故本文中對(duì)雙通道軸調(diào)節(jié)器采用單神經(jīng)元PID控制算法。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 65



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
