




 廣告
廣告





















































首頁 > 汽車測試技術(shù) > 正文
CARAMEL車載GPS位置完整性檢測
2021-12-05 19:33:52· 來源:軒轅實驗室

*本文來自軒轅實驗室楊杰森的研究成果和學(xué)習(xí)筆記H2020-CARAMEL項目的主要目標(biāo)是解決現(xiàn)代車輛所采用的新技術(shù)領(lǐng)域所帶來的網(wǎng)絡(luò)安全漏洞,其中包括先進(jìn)的人工智能和
*本文來自軒轅實驗室楊杰森的研究成果和學(xué)習(xí)筆記
H2020-CARAMEL項目的主要目標(biāo)是解決現(xiàn)代車輛所采用的新技術(shù)領(lǐng)域所帶來的網(wǎng)絡(luò)安全漏洞,其中包括先進(jìn)的人工智能和機(jī)器學(xué)習(xí)技術(shù)。因此,CARAMEL增強了對與自動駕駛、電動汽車智能充電以及車輛之間或車輛與路邊基礎(chǔ)設(shè)施之間通信相關(guān)的威脅的保護(hù)。這一部分介紹了CARAMEL項目利用車輛內(nèi)部傳感器進(jìn)行GPS欺騙檢測的模塊。
在這種方法中,CARAMEL系統(tǒng)使用貝葉斯濾波技術(shù)計算車輛的備選定位,以檢查GPS測量的完整性。所提出方法的基本思想是為不依賴GPS測量的特定車輛獲得后退定位技術(shù)。這個方法是模塊化的,如下圖所示。
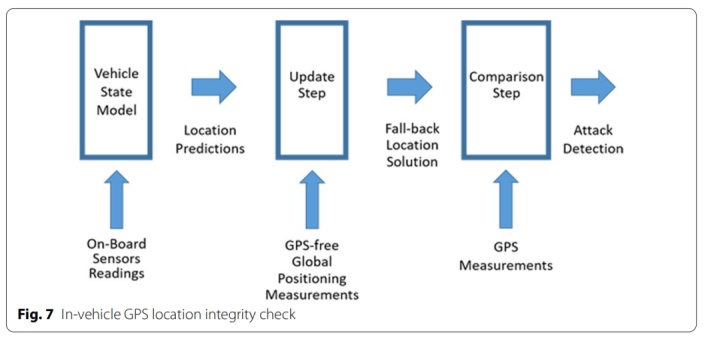
為了實現(xiàn)回退定位技術(shù),建議的貝葉斯濾波器由以下兩個基本步驟組成:(1)預(yù)測步驟;(2)更新步驟。對于預(yù)測步驟,通過描述基本的物理定律來描述車輛的運動,并通過車載傳感器測量獲得未來的車輛位置。在更新步驟中,車輛的預(yù)測位置與由車輛內(nèi)的替代位置系統(tǒng)獲得的無GPS的全球位置測量值相融合,然后將所提出的貝葉斯濾波器的輸出與實際的GPS測量值進(jìn)行比較,以檢測持續(xù)的定位偏差,從而可能出現(xiàn)GPS欺騙攻擊。根據(jù)更新步驟中使用的全球位置測量值的質(zhì)量,CARAMEL系統(tǒng)可能會恢復(fù)到后退位置解決方案,以便在攻擊發(fā)生時暫時引導(dǎo)車輛。值得注意的是,CARAMEL系統(tǒng)采用的解決方案適應(yīng)可用的車載傳感器和可用的無GPS全球位置測量。

軟件可訪問CAN總線數(shù)據(jù),以及轉(zhuǎn)向角(α)、偏航率(φ˙)和車輪速度(v)傳感器數(shù)據(jù)。利用這些傳感器信息,可以根據(jù)基本的物理定律建立一個車輛系統(tǒng)狀態(tài)的非線性模型。這種非線性模型利用了一個基本的假設(shè),即車輛的運動可以很好地近似于自行車,即將后軸和主軸折疊成一個單點。根據(jù)所采用的自行車模型,車輛的運動模型可以考慮到所涉及的慣性力,如車輪在路面上的摩擦力。如果認(rèn)為車架方向為x軸,則其車架參考系統(tǒng)中車輛位置和速度的一步預(yù)測為
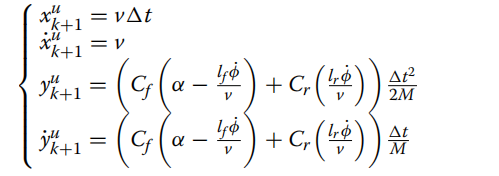
其中和分別表示前輪和后輪距離質(zhì)量重心的距離,M為車輛的質(zhì)量,和表示前后輪的角落度。
針對車輛車身運動的預(yù)測,采用了簡單的坐標(biāo)變換,得到了全局地理參考系統(tǒng)中的一步預(yù)測,在不相關(guān)和高斯測量噪聲的假設(shè)下,采用貝葉斯濾波器,即擴(kuò)展卡爾曼濾波器(EKF)方法,計算了估計車輛系統(tǒng)狀態(tài)的相關(guān)協(xié)方差。EKF還用于更新預(yù)測的系統(tǒng)狀態(tài)和不gps位置測量的不確定度。在EKF的更新步驟中,通過機(jī)會信號(SoO)獲得車輛的全局位置測量。(機(jī)會信號是指來源于調(diào)幅/調(diào)頻收音機(jī)、蜂窩電視、電視信號等很容易獲得的信號)擴(kuò)展卡爾曼濾波器(EKF)還用于更新預(yù)測的系統(tǒng)狀態(tài)和不GPS位置測量的不確定度,如果SoO更新步驟的誤差近似為高斯分布,正如在CARAMEL中假設(shè)的那樣,后退解的輸出提供了車輛位置的近似值,同時也遵循高斯分布;后退解的輸出是車輛位置估計的平均值[,],以及相應(yīng)的協(xié)方差矩陣。
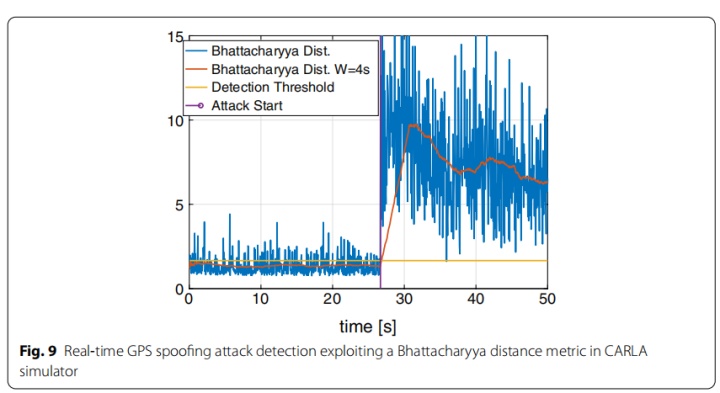
事實上,GPS接收器不僅為車輛提供了一個近似的位置[,],而且還提供了一個不確定性分?jǐn)?shù),可以轉(zhuǎn)換為一個協(xié)方差矩陣,如果GPS測量值也近似為高斯分布,那么兩個位置測量值之間的自然比較就用巴氏距離( Bhattacharyya distance)表示(巴氏距離計算兩個統(tǒng)計分布的重疊量,因此,測量它們的相似性),如果兩個分布之間的巴氏距離超過預(yù)定的閾值T,則發(fā)出警報。因此,為了減少誤報警的數(shù)量,得到攻擊閾值T,即GPS測量值與后退定位技術(shù)之間距離的第99百分位數(shù),即根據(jù)設(shè)計,誤報警的數(shù)量等于所發(fā)出報警的1%。特別地,在接收到新的GPS測量值的每個時隙k處,計算以下的平均巴氏距離:
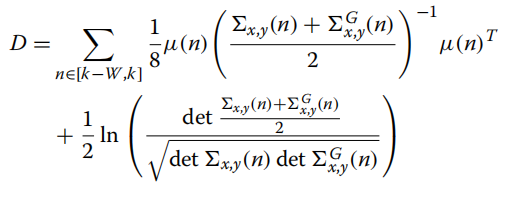
其中,巴氏距離是在W秒的滑動窗口內(nèi)收集的樣本的平均值。通過滑動窗口機(jī)制,可以提高攻擊檢測率,過濾掉欺騙GPS測量值。然而,在設(shè)置W時,必須考慮到滑動窗口的長度和所描述的攻擊檢測機(jī)制對GPS欺騙攻擊的快速反應(yīng)的能力之間的交易,也就說增大滑動窗口W可能會增大檢測欺騙攻擊的時延.
圖8描述了:(1)車輛的實際軌跡;(2)后退位置解決方案,其中SoO被模擬為具有非常大方差的無GPS測量,即;(3)車輛接收的GPS測量值(分布為,在模擬時間的前半段后被惡意實體攻擊,其發(fā)送偏差等于15米。
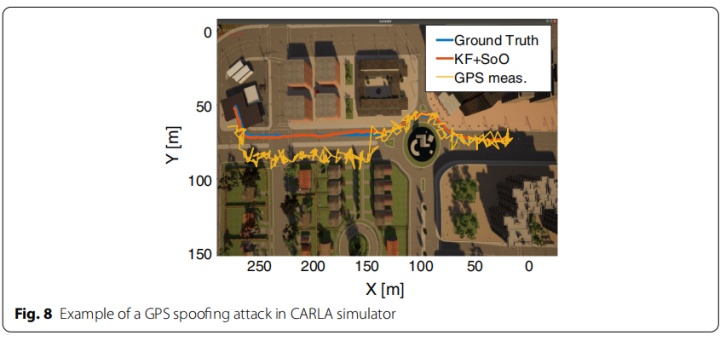
圖9顯示了CARAMEL中的檢測方法的輸出。正如預(yù)期的那樣,瞬時巴氏距離呈現(xiàn)出很高的可變性,使得檢測到可能的攻擊更加隱蔽。然而,平均巴氏距離D,滑動時間窗為W=4s,大大簡化了該過程,CARAMEL方法能夠檢測到惡意修改的97%的GPS測量值
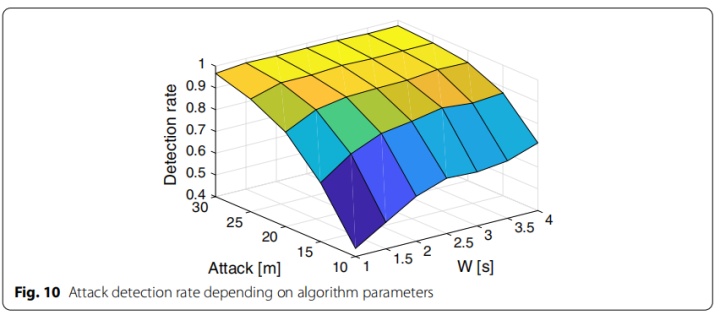
最后,圖10顯示了一個大型模擬活動的結(jié)果,其中滑動窗口W的長度和用于修改GPS測量的偏差模塊都隨著預(yù)先設(shè)置的間隔而變化。在某些模擬設(shè)置中,篡改GPS測量的檢出率高達(dá)98%。此外,一個更大的滑動窗口W提高了該方法的性能,特別是當(dāng)引入的攻擊偏差小于SoO位置的不確定性時。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機(jī)動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
