




 廣告
廣告





















































面向能耗的純電動汽車雙電機動力系統(tǒng)控制策略
2021-12-15 12:51:41· 來源:焉知動力驅(qū)動系統(tǒng)

1. 雙電機電力系統(tǒng)能耗控制策略框架1.1 問題描述之前的研究提出了一種新的雙電機電力系統(tǒng)配置,既滿 足車輛的轉(zhuǎn)速耦合要求,又滿足扭矩耦合要求。結(jié)構(gòu)簡單,體積
1. 雙電機電力系統(tǒng)能耗控制策略框架
1.1 問題描述
之前的研究提出了一種新的雙電機電力系統(tǒng)配置,既滿 足車輛的轉(zhuǎn)速耦合要求,又滿足扭矩耦合要求。結(jié)構(gòu)簡單,體積小,易于安排,避免同時使用多個剎車和離合器。
1.2 雙電機電力系統(tǒng)控制策略框架
實時和高效的主要目標控制的雙動力系統(tǒng)是準確獲取需 求扭矩的電動汽車基于信息如油門踏板開度和車速,然后制 定電動機轉(zhuǎn)速和轉(zhuǎn)矩分配策略來提高車輛的經(jīng)濟性能和動態(tài)性能。
雙電機電力系統(tǒng)控制策略主要包括兩個方面:
(1)需求扭矩的計算是基于司機油門踏板的控制信息,考慮車輛狀態(tài)信息,運動狀態(tài)(電機啟動和停止、轉(zhuǎn)矩速度,等等)和電池信息、剩余量的實時計算電機轉(zhuǎn)矩需求。
(2)速度轉(zhuǎn)矩的需求分配,結(jié)合實際的能耗最小化情況, 執(zhí)行速度轉(zhuǎn)矩的最優(yōu)分布在兩個汽車速度耦合的兩種模式, 并在此基礎(chǔ)上,確定能耗的最低點為雙電機功率的系統(tǒng)工作點。
2. 電動汽車需求轉(zhuǎn)矩的獲取
需求扭矩獲取的實質(zhì)是分析駕駛員在不同路面條件下的意愿,獲取車輛行駛所需的扭矩,包括基本扭矩和補償扭矩。
Treq=Tb+Tadd (1)
式中:Tb 表示電動汽車行駛所需的基礎(chǔ)轉(zhuǎn)矩;Tadd 表 示為提高電動汽車動力性能增加的補償轉(zhuǎn)矩。
2.1 基本轉(zhuǎn)矩的確定
油門踏板開啟在 40%以內(nèi)占到整車工況的 90%。這種設(shè)置方式極不合理,不符合駕駛習(xí)慣。然而,優(yōu)越的加速性能要求動力電池始終提供大的放電速率,這不僅會降低電池壽命,還會增加電動汽車的能耗,降低電動汽車的巡航距離。
在此基礎(chǔ)上,從降低能耗的角度出發(fā),本節(jié)根據(jù)標準工況要求扭矩統(tǒng)計量對“直線”曲線進行修正,采用“下凹型” 扭矩載荷因子和油門踏板開啟曲線控制方法。
本文在要求上提出的轉(zhuǎn)矩負荷率控制在 40%以內(nèi),以低能耗消耗為出發(fā)點,進行系統(tǒng)總負載率控制到 95%,可以實 現(xiàn)在油門的開度上以 0-100%情況下,其系統(tǒng)轉(zhuǎn)矩負荷率控制在 0-95%之間,可以滿足汽車的正常加速爬升等需求。剩余5%的扭矩負載可用于扭矩補償。如表 1 所示為兩者之間存在 的關(guān)系。
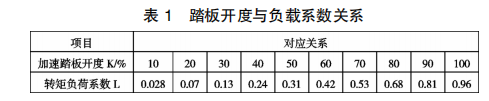
為了快速、準確地獲得最大轉(zhuǎn)矩 Tvmax 電動汽車能提供車輛速度 v,同等動力地圖根據(jù)車速和方向盤轉(zhuǎn)矩畫根據(jù)雙電機功率系統(tǒng)的參數(shù)。
2.2 基于低能耗的轉(zhuǎn)矩補償策略
為了提高汽車在爬升和加速工況下的動力性,需要對基 本扭矩進行補償。細節(jié)如下:
(1)適當?shù)呐ぞ匮a償可以使電機在更有效的范圍內(nèi)運行。在電機負載因數(shù)較高的情況下,扭矩補償不合適,否則會降低電機的工作效率,因此,通過分析電機效率地圖地圖,當電動機負載因子γ超過 60%,轉(zhuǎn)矩補償很容易降低發(fā)動機效率。
(2)道路信息根據(jù)道路坡度,實時對基本扭矩進行適當補償,有利于提高電動汽車的行駛舒適性。
3. 面向能耗的雙電機動力系統(tǒng)動力分配策略
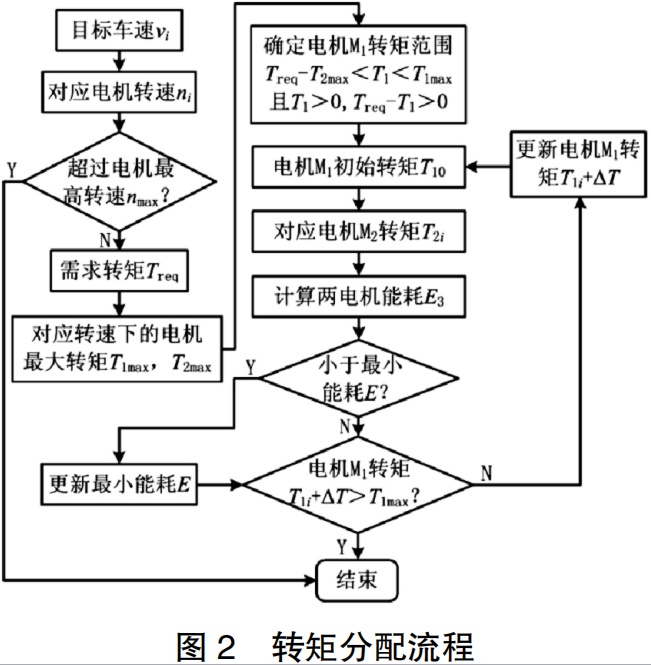
為了實現(xiàn)最小能耗,開發(fā)了雙電機轉(zhuǎn)矩優(yōu)化分配過程, 如圖 2 所示。
根據(jù)圖 4 的轉(zhuǎn)矩分配流程圖可得,電機 M1 的初始轉(zhuǎn)矩T10 取電機 M1 轉(zhuǎn)矩范圍的最小值,在這種情況下,對應(yīng)的兩個電機扭矩是最優(yōu)的扭矩組合。
4. 基于 Simulink 的雙電機電力系統(tǒng)仿真策略控制
4.1 雙電機動力系統(tǒng)仿真模型的建立
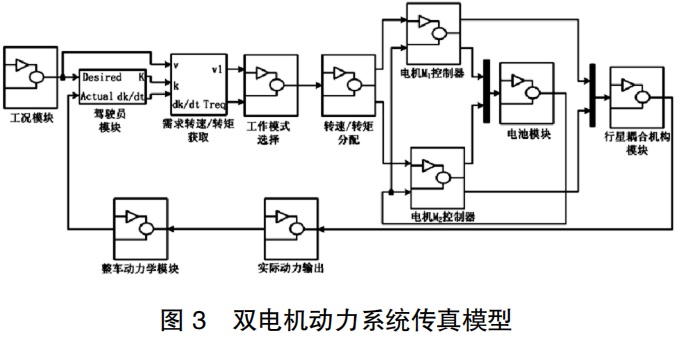
動力系統(tǒng)仿真整體模型如圖 3 所示:
4.2 仿真結(jié)果分析
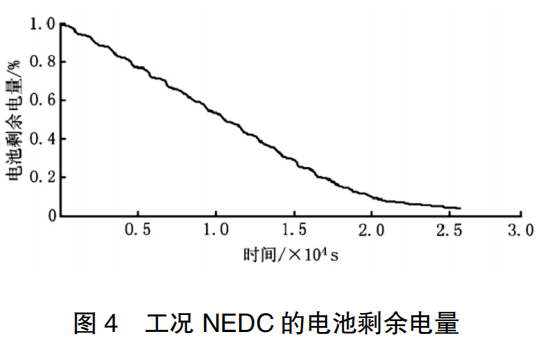
NEDC 條件下剩余電池功率曲線如圖 4 所示。通過仿真的數(shù)據(jù)分析以及圖像顯示,在電池電量在只剩 10%,純電動車的雙電機動力系統(tǒng)在運行時間上比單機動力系統(tǒng)的運行時間 較長,其能耗量較低,續(xù)航能力更強。
5. 結(jié)語
本文提出的雙電機電力系統(tǒng)控制策略主要是通過理論分析,通過仿真驗證雙電機電力系統(tǒng)控制策略的可靠性。原型分析沒有進行進一步的分析和驗證。因此,對雙電機電力系統(tǒng)的樣機試驗和加載實驗的驗證實踐是下一步工作的重點。



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對機動車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
