




 廣告
廣告





















































增程式電動車懸置系統優(yōu)化及NVH性能測試
2021-12-15 12:53:14· 來源:汽車NVH云講堂

摘要:為了改善增程式電動車的NVH性能,采用四點襯套式懸置系統支撐該電動車的動力總成,同時設計了兩種匹配方案。原車狀態(tài)的設計方案存在較嚴重的振動耦合現象
摘要:為了改善增程式電動車的NVH性能,采用四點襯套式懸置系統支撐該電動車的動力總成,同時設計了兩種匹配方案。原車狀態(tài)的設計方案存在較嚴重的振動耦合現象,經過懸置系統固有頻率匹配與振動解耦率的優(yōu)化以后,主振動的振動解耦率均高于80%,頻率分布對于怠速T況的隔振有利。本文對優(yōu)化設計的懸置系統進行了NVH性能測試,結果表明:四個懸置在三個方向的怠速丁況隔振量都在20dB以上。怠速T況下,方向盤的振動加速度均小于0.05g,半階次無明顯振動;當發(fā)動機轉速為3000r/min時。方向盤處一階主振動較小。振動加速度只有0.02g。而半階次振動加速度非常大,最大振動加速度達到0.15g。該研究T-作表明,半階次振動是中高轉速下增程式電動車振動和噪聲產生的主要原因。
關鍵詞:增程式電動汽車;動力總成懸置系統;振動解耦;半階次振動;NVH性能測試
0 引言
近年來,電動汽車研究取得重大發(fā)展,但是電池能量密度不高、壽命較短,導致續(xù)航里程短,是其當前市場推廣的最大瓶頸。為了解決電動汽車續(xù)航里程短的問題,各種增程式電動汽車應運而生。增程式電動汽車在純電動汽車的基礎上加載車載充電器,從而大大延長了電動汽車的續(xù)航里程。增程式電動汽車效率高,所需電池容量比同檔次的純電動汽車小,不會因缺電而拋錨,受到了研究者廣泛的關注[1]。
電機驅動系統、增程器系統和整車控制系統、動力總成懸置系統都被布置在增程式電動汽車的前艙,由于動力模塊增加,且前艙結構布置緊湊,導致整車NVH控制難度也相應地增加[2]。
本文主要討論以2缸汽油機為動力源的小型增程式電動汽車。增程器由2缸汽油機和ISG發(fā)電機(啟動發(fā)電一體機)組成,是增程式電動車的核心模塊部件。增程器作為串聯式混合動力車的模塊化部件在技術上具有一種潛力,能補償純電動車續(xù)駛里程不足的缺陷,因而十分適合于在小型車和微型車領域內應用。
目前,奇瑞汽車股份有限公司在奇瑞A5和S18(即瑞麒M1)平臺上開發(fā)了兩款增程式純電動車,其充電一次可行駛350km。以$18增程式電動汽車為例,純電動模式行駛時,振動和噪音都非常??;當啟動增程器行駛模式,并且車速超過80km/h時,駕駛員能夠感覺到方向盤處明顯的振動,并且伴隨有尖銳的噪音??蛻魧υ龀唐鞯慕邮艹潭仍诤艽蟪潭壬先Q于它的NVH特性[3]。較差的NVH性能嚴重制約了該增程式電動車的產業(yè)化。雖然汽車行業(yè)內普遍認同增程器產業(yè)化的重要性,但是目前國內增程器的產業(yè)化尚屬空白,其中,制約增程器產業(yè)化的一個重要原因是其NVH性能無法滿足乘員對汽車乘坐舒適性的需求。通過對增程器系統NVH性能進行優(yōu)化研究,可改善乘用車的乘坐舒適性,將會為增程器系統的快速產業(yè)化發(fā)展提供技術支撐。
影響增程器NVH性能的因素有很多,如發(fā)動機本身的噪聲、振動傳遞的路徑、懸置系統的布置等[41],本文以奇瑞某款增程式電動車和與之匹配的SQRB2G06型增程器為例,主要從動力總成懸置系統的角度對其進行分析,從固有頻率優(yōu)化配置和振動解耦角度為懸置系統匹配了兩種設計方案,進行隔振性能優(yōu)化分析,并且對優(yōu)化后的增程式電動車進行隔振率測試和振動頻譜測試,最終實現增程器系統與整車良好的NVH性能匹配。
1 增程式電動車動力總成及懸置系統布置
某款緊湊型增程式小型電動車的整體布置方案采用動力系統前置前輪驅動。前艙布置電驅動動力總成、增程器系統、電機控制器/發(fā)電機控制器GCU&MCU、DCDC直流變換器、低壓蓄電池、電動真空制動系統、電動助力轉向系統、電動空調系統、電動冷卻系統、高低壓配電盒等,將動力電池包、電池管理系統及車載充電機布置在后備箱。
圖1為增程式電動車動力總成前艙總體布置方案圖,發(fā)電機組采用奇瑞272發(fā)動機和8kW發(fā)電機同軸布置方案,法蘭盤2把兩缸發(fā)動機1和發(fā)電機3連接起來,組成增程器系統,永磁同步電機5作為電動汽車的驅動電機,和一個固定減速比的減速器4組成電動車的集成式動力總成。

動力總成在S18EV純電動汽車基礎上新開發(fā)驅動電機、減速器總成;減速器連接發(fā)電機和驅動電機,272發(fā)動機需新開發(fā)進排氣系統;發(fā)動機和信號盤配合曲軸中心坐標,減速器布置角度為26。,均滿足布置要求;動力總成懸置系統采用四點懸置,并且四個懸置均為襯套式懸置,減速器總成上布置兩個(前后各一個),發(fā)動機和驅動電機上各一個,動力總成懸置系統的布置如圖2所示,Front—MT,Rear_MT,Left—MT,Right—MT分別表示動力總成的前懸置、后懸置、左懸置、右懸置,CM表示動力總成質心坐標,在車輛坐標系下,z軸正向從車頭指向車尾,y軸正向從左到右,TRA表示動力總成的轉矩軸。
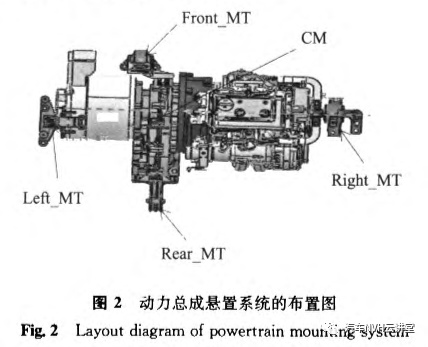
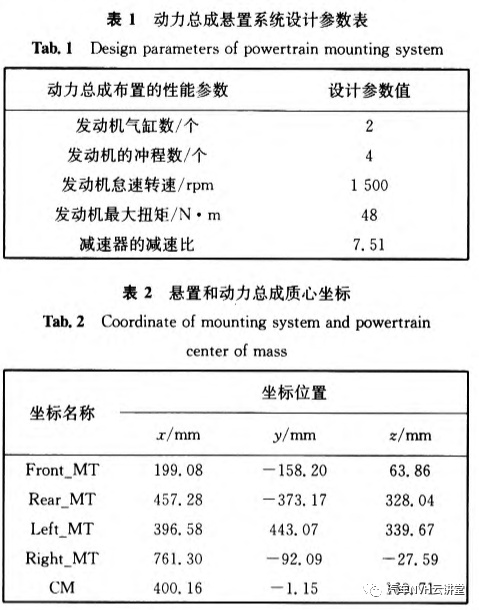
與懸置有關的動力總成的設計參數如表1所示,懸置和動力總成的質心坐標如表2所示。
2 增程式電動車懸置系統優(yōu)化分析
2.1 懸置系統固有頻率匹配分析
對于傳統的汽油車,懸置點的合理布置和安裝角度的優(yōu)化匹配能夠獲取較好的NVH性能[7-8|。增程式電動車由于動力系統本身結構的復雜性,在計算增程式電動車動力總成懸置系統的振動響應時,需要考慮發(fā)動機和電動機固有頻率不同的工作特性,發(fā)動機的怠速點火頻率是最低激勵頻率,電動機的工作頻率是最高激勵頻率的上限,增程式電動車懸置系統固有頻率的分布范圍應該介于最低激勵頻率和最高激勵頻率之間。因為如果懸置系統低階(1階)固有頻率過低,容易與發(fā)動機的怠速頻率產生共振。
由懸置隔振原理可知[9],當懸置系統的激振頻率與動力總成最低階模態(tài)固有頻率之比η>√2時,可以起到隔振作用。為了保證懸置系統隔振作用更可靠和安全,一般取η>2.5~5。因此,動力總成懸置系統根據前、后、左、右懸置的動剛度進行固有頻率匹配分析時,通常選擇6階模態(tài)進行振動模態(tài)分析,選用發(fā)動機怠速頻率作為1階頻率的下限,且6階固有頻率不能超過電動機額定轉速對應的正常工作頻率。
發(fā)動機的活塞在氣缸內周期性上下往復運動和壓縮氣體對活塞的反作用力,使發(fā)動機成為一個可周期振動的振源。兩缸發(fā)動機的振動主要來源于點火激勵和不平衡慣性力激勵,這兩種激勵方式并不孤立存在,而是相互影響,互相加劇,尤其是在中高轉速下,不平衡慣性力的表現尤其明顯。同時,冷卻風扇的振動激勵也比較大,在振動測試時應該引起重視。點火激勵頻率就是發(fā)動機的做功頻率,計算公式如式(1)所示

式中:。f1是做功頻率;以是發(fā)動機轉速;P是發(fā)動機的缸數;d是沖程數。不平衡慣性力激勵是由活塞往復運動不平衡慣性力引起的垂直振動,其激勵頻率為

式中:。f1-是不平衡慣性力激勵頻率;n是發(fā)動機轉速;t是比例系數,一階慣性力t=1,二階慣性力t=2。
2.2 懸置系統振動能量解耦分析
動力總成懸置系統在6個方向上完全解耦僅在理論上可行,在工程上實現難度較大,因此,通常只使幾個起關鍵作用的振動模態(tài)獲得解耦[9-10]。如果在某階主振動固有模態(tài)下存在2個或者更多方向的振動耦合率超過10%,就需要對整個懸置系統重新進行同有頻率優(yōu)化匹配。增程式電動汽車動力總成懸置系統的振動設計都是按照主振動模態(tài)部分解耦的方法進行的。根據增程式電動車的工作需要,繞發(fā)動機曲軸的旋轉振動模態(tài)和沿著z軸的垂直振動模態(tài)是主振動模態(tài),在解耦優(yōu)化分析時需要給予重點關注。
由于增程式小型電動車動力總成均布置在前艙。而前艙部分空間狹小,所以在進行懸置系統總布置設計時,前后懸置彈性中心的連線偏離了動力總成的質心。這種緊湊型布置根本無法保證前后兩個彈性中心均落在轉矩軸上,因此,無法獲得懸置系統的完全振動解耦。為了協調動力總成懸置布置的緊湊性和振動解耦率之間的矛盾,本文將左右懸置彈性中心的連線稍微偏離了轉矩軸,使兩者之間的夾角為4。25。,使得前后懸置有一定的承載,即使前后懸置的垂向不承載,也會使四個懸置的前后方向承載,要想改變這種情況,需使左懸置向車頭移動一段距離。
當懸置系統以。j階模態(tài)振動時,第尼個廣義坐標分配到的能量占系統總能量的百分比為
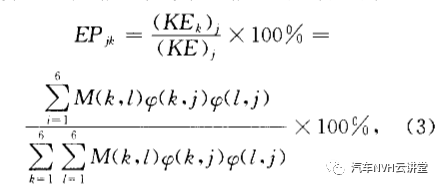
式中:Ψ(k,J)。p(z。J)分別為第J階振型的第k個和第z個元素;M(k,l)為系統質量矩陣的第k行、第z列元素;(KEk),表示第是行元素之和為第k個廣義坐標所分配到的能量;(KE),表示懸置系統總能量;EP。代表解耦程度的高低,若其值為100%,則第j階模態(tài)完全解耦。
考慮到主振動模態(tài)的重要性,將動力總成懸置系統主振動能量集中度提高作為優(yōu)化設計的目標12,因此懸置系統的能量解耦目標函數可確定為

式中:EPjj為系統在作某階固有頻率振動時,振動占優(yōu)方向所占的振動能量百分比,此值越大系統的解耦程度越高;C,為對應于第J階頻率的加權因子,主振動方向的加權因子根據工作的重要性決定取值的大小,該階振動模態(tài)越重要,加權因子取值越大;y為懸置系統的能量解耦目標函數,該值越小,表明該懸置系統整體振動解耦效果越好。
2.3 懸置系統振動分析結果
某款增程式電動車的動力總成由發(fā)動機給發(fā)電機充電,發(fā)電機的額定轉速一般都較高,故其激勵頻率會遠遠大于發(fā)動機的激勵頻率。如果懸置系統解耦和模態(tài)能滿足發(fā)動機的要求,那么肯定能滿足發(fā)電機的要求。該發(fā)動機為兩缸四沖程發(fā)動機,怠速轉速為1000r/min,根據式(1)計算其怠速激勵頻率為16。67Hz,要使懸置系統有隔振功能,懸置系統的固有頻率不得高于11。78Hz?;趦筛姿臎_程發(fā)動機的特性,其往復慣性力的的主階次為2階,故垂向頻率可以分布高點,而燃燒激勵和曲軸的扭矩激勵的主階次為1階,其激勵頻率不得高于11。78Hz。奇瑞某款增程式電動車動力總成懸置系統有兩種設計方案,設計方案1是原車狀態(tài)的懸置系統設計方案,設計方案2是對懸置的剛度和固有頻率進行優(yōu)化匹配以后的設計方案。表3是方案1中懸置系統的固有頻率與能量解耦率分布情況。
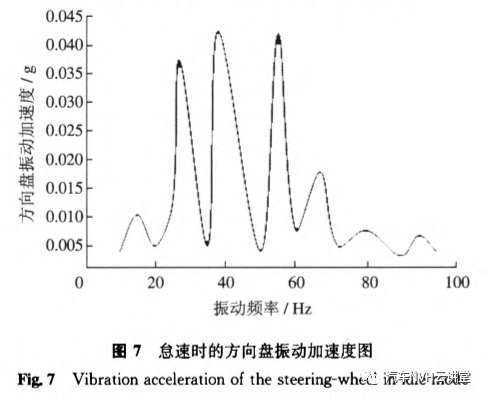
表3中,x,y,z分別表示沿著坐標軸x,y,z方向的平移振動,θx, θy, θz表示繞著坐標軸x,y,z方向的扭轉振動。由表4可知,系統振動解耦率除表θx方向較理想外,其余方向都低于了80%,在第3階模態(tài)中,x與θz向耦合程度較高,在第6階模態(tài)中,x,θy,θz出現了3自由度較強的耦合振動現象,在第4階模態(tài)中,x,z,θx, θy出現了4自由度較強的耦合振動現象,證明原車狀態(tài)的設計方案1存在較嚴重的振動耦合現象。從頻率上看,要使懸置系統具有隔振功能,固有頻率的上限是11。78Hz,方案1中5,6階振動模態(tài)的固有頻率均超過了該上限,這對于怠速工況的隔振是相當不利的,需要對懸置系統的剛度和頻率分布重新進行解耦優(yōu)化配置。
表4是經過優(yōu)化匹配的設計方案2中懸置系統的固有頻率與能量解耦率分布情況。
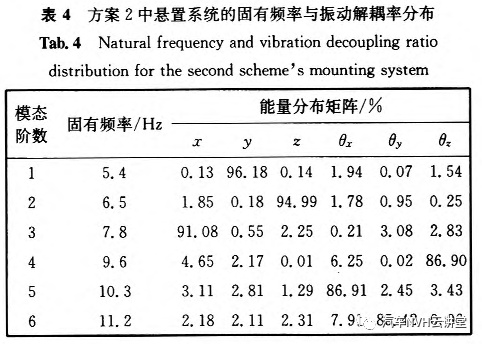
由表4可知,懸置系統的固有頻率與振動解耦率優(yōu)化匹配后,主振動的振動解耦率均高于80%。在第4階模態(tài),以與口:耦合程度較高,在第6階模態(tài),以與口。耦合程度較高,沒有出現3自由度及以上較強的耦合振動現象,證明經過優(yōu)化以后的設計方案2具有較理想的解耦率,從頻率上看,最高階頻率是11。2Hz,小于具有隔振功能的懸置系統固有頻率的上限值11。78Hz,這對于怠速工況的隔振相當有利。
3 增程式電動車的NVH性能測試
將方案2設計的懸置系統安裝在奇瑞某款增程式電動車上進行實車隔振測試和振動頻譜分析,考查優(yōu)化以后的懸置系統對整車實際隔振效果和提高整車NVH性能方面的指導作用。
3.1 懸置系統怠速隔振測試
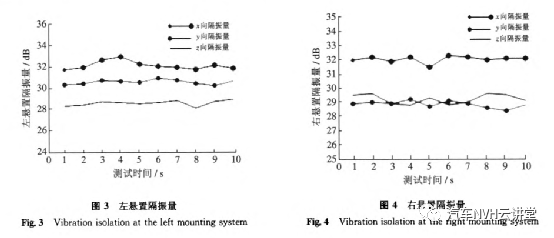
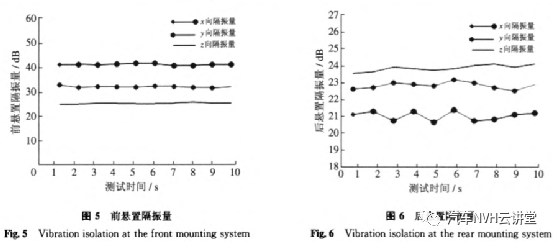
為了更加全面的考查經過優(yōu)化以后懸置系統的隔振效果,振動試驗采集系統采用北京波譜的Vib’SYS振動信號采集儀。在動力總成懸置左右前后四個位置上各放一個壓電式加速度傳感器,用來測量隔振前后的加速度響應。在怠速工況下,分別測試了左右前后四個懸置z,y,z三個方向的隔振效果,隔振測試結果分別如圖3~圖6所示,left—engine+孔left—body+z分別表示在左懸置發(fā)動機側和車身側的z方向隔振測試結果,兩者的差值就是左懸置的z方向隔振量,其他方向依次類推。
由圖3可知,左懸置z方向隔振31。7dB,y方向隔振30dB,z方向隔振28dB;由圖4可知,右懸置z方向隔振31dB,y方向隔振28dB,z方向隔振28dB;由圖4可知,前懸置。27方向隔振36dB,y方向隔振28dB,z方向隔振22dB。由圖4可知,后懸置z方向隔振20dB,Y方向隔振23dB,z方向隔振23dB。根據測試結果可知,前、后、左、右四個懸置在三個方向的隔振量都在20dB以上,滿足增程式電動車對隔振量的基本要求。
3.2 方向盤的振動測試
通過振動信息采集儀對駕駛員座椅處的振動頻譜進行分析,根據工程實際需要,探索增程式電動車在發(fā)動機不同轉速運轉時噪聲形成的根本原因,特別需要研究中高速運轉的工況,進而為下一步降低噪聲提供基礎。
3.2.1 方向盤怠速時振動頻譜分析
圖7是怠速時方向盤振動的加速度圖。
圖7中x,y,z向分別表示隨著振動頻率變化時方向盤沿著z,Y,z向振動的加速度變化曲線圖,主階次是一階,怠速一階頻率為14Hz左右,38Hz的振動由發(fā)動機冷卻風扇引起。二階振動較大,發(fā)動機冷卻風扇引起的振動也較大,方向盤的振動加速度均小于0.059,半階次無明顯振動。
3.2.2 方向盤高速運轉時振動頻譜分析
圖8是發(fā)動機轉速為3000r/min時方向盤振動加速度圖,主階次是一階。根據式(2),該轉速下的一階激勵頻率是50Hz,由發(fā)動機冷卻風扇引起的38Hz的振動依然存在。一階主振動較小,振動加速度只有0。029,0。5階振動加速度非常大,達到了0。159,1。5階振動也較大,達到了0。1lg,都超過了增程式電動車允許的振動加速度的上限0。059。

當n為整數時,(n+0.5)次振動統稱為半階次振動。由上述分析可知,半階次振動是增程式電動車高速行駛時振動和噪聲產生的主要影響因素,是制約增程式電動汽車產業(yè)化的主要原因。下一階段,將要深入研究如何采取控制措施解決增程式電動車的半階次振動問題。
4 結論
1)從固有頻率匹配與振動解耦率的角度對增程式電動車進行了分析,分析結果表明:原車狀態(tài)的設計方案存在較嚴重的振動耦合現象,并且2個高階振動模態(tài)的固有頻率超過了隔振功能的上限頻率;經過懸置系統固有頻率與振動解耦率的優(yōu)化匹配以后,主振動的振動解耦率均高于萬方數據80%。頻率分布對于怠速工況的隔振有利。
2)對懸置系統優(yōu)化設計以后的增程式電動車進行裝車懸置系統怠速工況隔振測試,測試結果表明:前、后、左、右四個懸置在三個方向的隔振量都在20dB以上,滿足了增程式電動車對隔振量的基本要求。
3)對懸置系統優(yōu)化設計以后的增程式電動車進行振動頻譜分析,測試結果表明:怠速工況下,方向盤的振動加速度均小于0.059,半階次無明顯振動;當發(fā)動機轉速為3000r/min時。方向盤處一階主振動較小,振動加速度只有0.029,半階次振動加速度非常大,達到0.159,超過了增程式電動車允許的振動加速度的上限要求。
4)半階次振動是增程式電動車高速行駛時振動和噪聲產生的主要影響因素,是制約增程式電動汽車產業(yè)化的主要原因。下一階段,將要深入研究如何采取控制措施解決增程式電動車的半階次振動問題。
作者:徐忠四1,王經常2,高立新2,倪紹勇2,杜文建3
作者單位:(1。中北大學機電T程學院,山西太原030051;2。奇瑞新能源汽車技術有限公司,安徽蕪湖241002;3。奇瑞汽車股份有限公司產品開發(fā)管理中心,安徽蕪湖241009)
來源:中北大學學報(自然科學版)



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗方法”將有國家標準
2026-03-03 12:44
-
十年耐久監(jiān)管時代:電池系統開發(fā)策略將如何
2026-03-03 12:44
-
聯合國法規(guī)R59對機動車備用消聲系統的工程
2026-03-03 12:08
-
聯合國法規(guī)R58對后下部防護裝置的工程化約
2026-03-03 12:07
-
聯合國法規(guī)R57對摩托車前照燈配光性能的工
2026-03-03 12:07
