




 廣告
廣告





















































首頁(yè) > 汽車測(cè)試技術(shù) > 正文
某 SUV 整車虛擬迭代的方法研究
2021-12-23 20:20:13· 來源:汽車測(cè)試網(wǎng) 作者:黃小征 米 磊 劉艷華 王 海

本文采集道路載荷譜,搭建多體動(dòng)力學(xué)模型,應(yīng)用虛擬迭代方法,反求出輪心處的四個(gè)垂向位移激勵(lì),最后對(duì)比分析,表明仿真結(jié)果與試驗(yàn)數(shù)據(jù)對(duì)標(biāo)良好,再現(xiàn)了試驗(yàn)車的
本文采集道路載荷譜,搭建多體動(dòng)力學(xué)模型,應(yīng)用虛擬迭代方法,反求出輪心處的四個(gè)垂向位移激勵(lì),最后對(duì)比分析,表明仿真結(jié)果與試驗(yàn)數(shù)據(jù)對(duì)標(biāo)良好,再現(xiàn)了試驗(yàn)車的路譜采集過程,獲得了車身與底盤零部件安裝點(diǎn)的載荷譜數(shù)據(jù),為疲勞耐久性分析提供數(shù)據(jù)支持。
近年來,汽車結(jié)構(gòu)疲勞耐久性能的開發(fā),越來越受到各大主機(jī)廠的關(guān)注,在新車型研發(fā)之前就會(huì)對(duì)其進(jìn)行CAE分析和結(jié)構(gòu)改進(jìn)。然而,如何獲得精確的連接點(diǎn)受力譜成為疲勞分析的前提和關(guān)鍵。
基于六分力儀的載荷分解技術(shù)把路譜采集、信號(hào)處理、多體動(dòng)力學(xué)仿真和虛擬迭代技術(shù)有機(jī)地結(jié)合在一起,共同形成了一個(gè)多學(xué)科的載荷分解技術(shù)。要獲得底盤和車身各個(gè)零部件的疲勞載荷譜,就需要將六分力儀采集的路譜信號(hào)施加到整車多體動(dòng)力學(xué)模型中,經(jīng)多體仿真分析重現(xiàn)路譜采集過程,然后在多體動(dòng)力學(xué)軟件中將連接點(diǎn)載荷輸出,得到各零部件疲勞載荷譜。而實(shí)際上直接采集到的六分力是不能直接加載到虛擬樣機(jī)模型上的,主要是因?yàn)槁纷V信號(hào)采集誤差使虛擬樣機(jī)各個(gè)方向的受力并不能時(shí)刻保持平衡,就導(dǎo)致在虛擬環(huán)境中整車模型會(huì)出現(xiàn)垂向翻轉(zhuǎn)或水平漂移的現(xiàn)象,而且隨著誤差積累,整車狀態(tài)愈加偏離真實(shí)行駛狀態(tài),導(dǎo)致仿真分析無法進(jìn)行。
對(duì)于上述問題,常用的解決方案有以下三種:①固定車身,將六分力施加于輪心處,這種方法直接約束車身剛度,很大程度改變了車輛狀態(tài),獲得的載荷較真實(shí)值偏大;②車身柔性連接約束,通常使用低剛度彈簧將車輛固定于地面上,將六分力加載到輪心驅(qū)動(dòng)整車進(jìn)行分析,這種方式會(huì)引入外界約束條件,整車狀態(tài)及仿真誤差直接取決于連接彈簧剛度是否合理,對(duì)技術(shù)經(jīng)驗(yàn)要求較高且偏差較大;③采用虛擬迭代的方法進(jìn)行載荷分解。將六分力中的垂向力等效轉(zhuǎn)換成垂向位移,然后與其他五個(gè)方向的六分力信號(hào)一同施加到輪心處,并且保證多體動(dòng)力學(xué)模型輪心處的垂向力、懸架處響應(yīng)(如位移、力)與實(shí)測(cè)道路譜一致。這種方法不會(huì)引入額外約束或載荷,能夠真實(shí)地再現(xiàn)路譜采集過程,從而提高載荷分解的精度。本文就利用虛擬迭代技術(shù),進(jìn)行車身無約束狀態(tài)下的載荷迭代,獲取車身與懸架安裝點(diǎn)的載荷數(shù)據(jù),為后期的疲勞耐久性預(yù)測(cè)提供數(shù)據(jù)支持。
道路載荷譜采集及數(shù)據(jù)處理
為了獲得精確的疲勞載荷,并分析底盤零部件的耐久性能,對(duì)某公司內(nèi)部試驗(yàn)場(chǎng)強(qiáng)化路面的車輪六分力、彈簧位移、軸頭加速度及轉(zhuǎn)向拉桿力進(jìn)行數(shù)據(jù)采集。
1.道路載荷譜采集
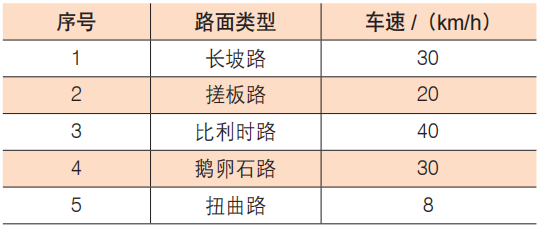
采集信號(hào)類型及通道數(shù)分配見表1,測(cè)量工況及具體要求見表2。
表 1 采集信號(hào)類型及通道數(shù)分配
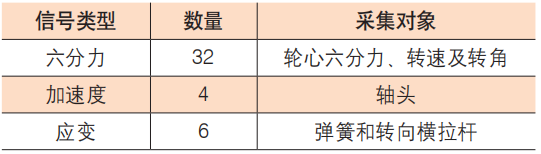
表 2 測(cè)量工況
各類信號(hào)的測(cè)量如圖1~4所示。

2.數(shù)據(jù)處理
在虛擬迭代前,需對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行如下處理:①路譜數(shù)據(jù)檢查:檢查路譜信號(hào)中有沒有異常的峰值,如果存在需要進(jìn)行剔除;②單位轉(zhuǎn)換:有時(shí)根據(jù)需要,需對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行單位變換,比如將試驗(yàn)數(shù)據(jù)中的m轉(zhuǎn)化成mm/s2,加速度由g轉(zhuǎn)化成mm/s2等;③重采樣:試驗(yàn)數(shù)據(jù)采集時(shí)采樣頻率一般采用512Hz,而進(jìn)行虛擬迭代時(shí)為提高計(jì)算效率,通常采用256Hz,因此需進(jìn)行重采樣處理,將試驗(yàn)數(shù)據(jù)采樣頻率由512Hz轉(zhuǎn)化成256Hz;④濾波:試驗(yàn)信號(hào)在進(jìn)行迭代前要進(jìn)行濾波處理,路面一般使用1~40Hz帶通濾波,同時(shí)生成濾波文件,供后續(xù)選擇使用。
整車多體模型搭建及校核
模型的精度直接影響傳遞函數(shù)的質(zhì)量,決定著載荷分解的準(zhǔn)確性。為得到精準(zhǔn)的疲勞載荷,我們必須保證整車多體動(dòng)力學(xué)模型與實(shí)際樣車高度一致。
1.整車多體模型搭建
虛擬迭代所用的多體模型包括前后懸架系統(tǒng)、車身系統(tǒng)、動(dòng)力總成、轉(zhuǎn)向系統(tǒng)、前后穩(wěn)定桿組件以及前后輪試驗(yàn)臺(tái),如圖5所示。其中動(dòng)力總成和前后輪試驗(yàn)臺(tái)模板需要進(jìn)行簡(jiǎn)化處理。需要注意的是,必須要使用樣車實(shí)測(cè)的減振器阻尼特性曲線、彈簧剛度特性曲線、限位塊剛度及間隙、襯套特性曲線、動(dòng)力總成的質(zhì)量特性、整車質(zhì)量特性及整車質(zhì)心坐標(biāo)等參數(shù),只有保證了這些參數(shù)正確,才能保證整車虛擬樣機(jī)的靜、動(dòng)態(tài)特性能夠與樣車一致。又由于試驗(yàn)測(cè)試的范圍達(dá)不到車輛在惡劣工況下的工作范圍,所以需要將緩沖塊、減振器以及襯套的特性曲線進(jìn)行擬合延伸,緩沖塊的擬合曲線如圖6所示。
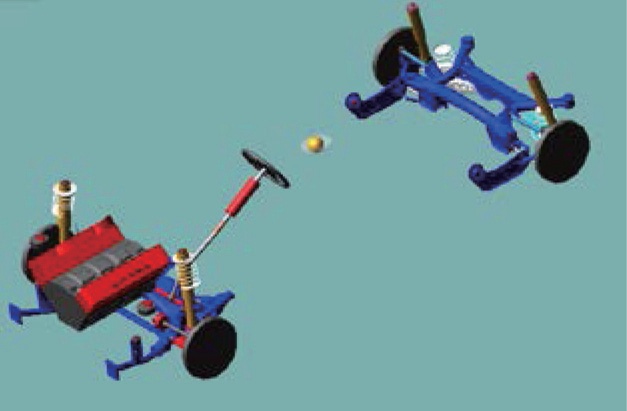
圖 5 整車多體動(dòng)力學(xué)模型
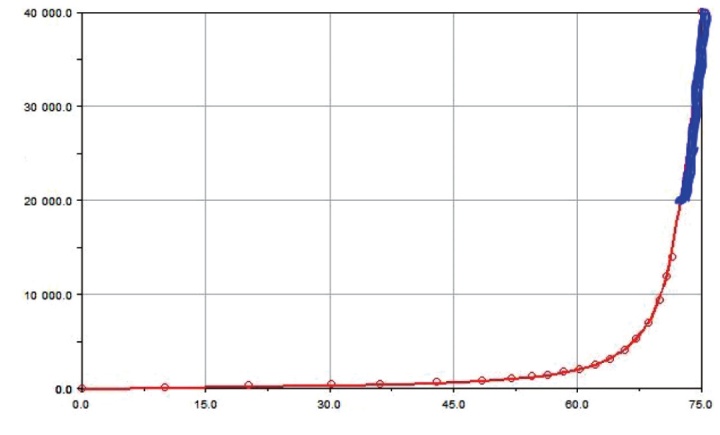
圖 6 藍(lán)色為緩沖塊曲線的擬合延伸部分
2.模型校核
為了驗(yàn)證搭建模型的準(zhǔn)確性,將前后懸架模型的K&C仿真結(jié)果與試驗(yàn)數(shù)據(jù)進(jìn)行了對(duì)比,前后懸架垂向剛度的對(duì)比如圖7和圖8所示(紅色為試驗(yàn)值,藍(lán)色為仿真值)。通過校核垂向剛度,對(duì)多體模型的彈簧預(yù)載、懸架剛度、上下緩沖塊和剛度曲線進(jìn)行驗(yàn)證并調(diào)整。
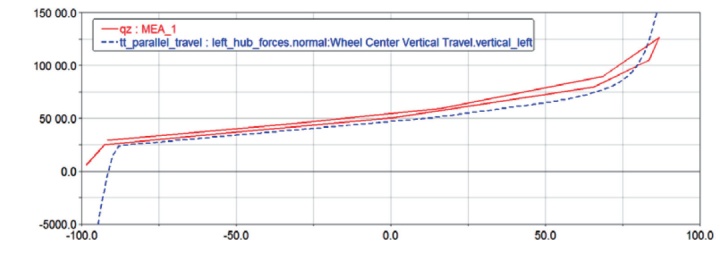
圖 7 左前輪垂向剛度
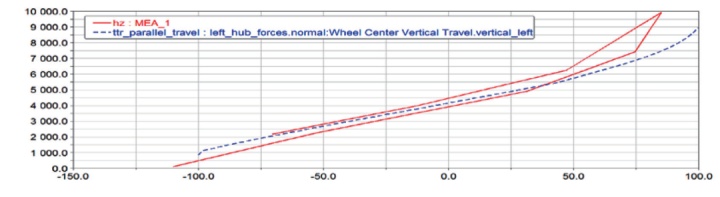
圖 8 左后輪垂向剛度
同時(shí)模型中各部件根據(jù)采譜車的狀態(tài)進(jìn)行配重,并賦予正確的整車質(zhì)量和轉(zhuǎn)動(dòng)慣量,最終虛擬迭代模型靜平衡仿真與采譜車的輪荷對(duì)比見表3。
表 3 輪荷對(duì)比

左前輪輪荷相差12.7N,右前輪輪荷相差11.5N,左后輪輪荷相差20.4N,右后輪輪荷相差6.9N,誤差在可接受范圍內(nèi),說明虛擬迭代模型和采譜車參數(shù)的一致性很高,可以進(jìn)行后續(xù)的仿真分析工作。
整車虛擬迭代及計(jì)算結(jié)果
1.虛擬迭代原理
虛擬迭代是用已知量求解未知量的過程,我們選擇的已知量通常是簡(jiǎn)單的容易測(cè)量的信號(hào),而需要迭代的量是通過試驗(yàn)難以獲得的而又十分重要的信號(hào)。一般來說,我們會(huì)利用低成本的傳感器(應(yīng)變片、加速度傳感器、位移傳感器)和低成本的測(cè)量方法測(cè)得輪心加速度、彈簧相對(duì)位移、減振器力、減振塔加速度等內(nèi)部信號(hào),通過FEMFATLab軟件將其轉(zhuǎn)化成外部驅(qū)動(dòng),即輪心垂向位移。當(dāng)利用輪心垂向位移替代輪心垂向力進(jìn)行車身無約束條件下的載荷計(jì)算時(shí),可以避免車身翻轉(zhuǎn)、側(cè)傾等問題的出現(xiàn)。同時(shí)通過監(jiān)控信號(hào)對(duì)模型進(jìn)行標(biāo)定和檢查,使得軟件的響應(yīng)值和實(shí)測(cè)值一致,因此能夠真實(shí)地再現(xiàn)試驗(yàn)車路譜采集過程,保證載荷分解的精度,傳遞函數(shù)生成如圖9所示。
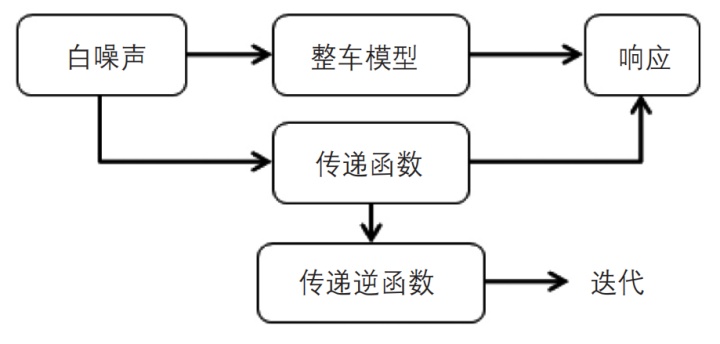
圖 9 傳遞函數(shù)生成
2.目標(biāo)信號(hào)選取
整車迭代最重要的是目標(biāo)信號(hào)的選取,針對(duì)不同的情況應(yīng)選擇不同的目標(biāo)信號(hào)。一般情況下如果只考慮垂向激勵(lì)時(shí),選擇軸頭加速度和彈簧位移;提高迭代結(jié)果的精度可以增加目標(biāo)信號(hào)如六分力數(shù)據(jù)、二力桿標(biāo)定載荷等。
3.整車迭代計(jì)算
虛擬迭代的結(jié)果評(píng)價(jià)主要從時(shí)域、相對(duì)損傷值、幅值和頻域等方面對(duì)迭代響應(yīng)信號(hào)和路譜實(shí)測(cè)值進(jìn)行比較,本文以搓板路為例進(jìn)行說明,左前彈簧位移仿真與試驗(yàn)的時(shí)域?qū)Ρ冉Y(jié)果和局部放大圖如圖10和圖11所示(紅色為仿真值,藍(lán)色為試驗(yàn)值)。我們發(fā)現(xiàn),仿真結(jié)果與試驗(yàn)數(shù)據(jù)幾乎重疊,且相對(duì)損傷為1.1,可見仿真與試驗(yàn)對(duì)比具有良好的相關(guān)性,模型精度較高,獲得的載荷譜能夠滿足疲勞分析的要求。
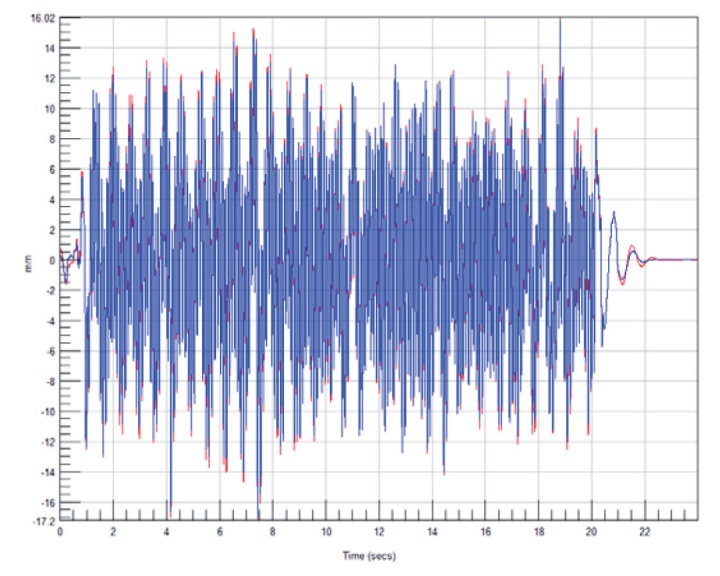
圖 10 左前彈簧位移時(shí)域?qū)Ρ?/span>
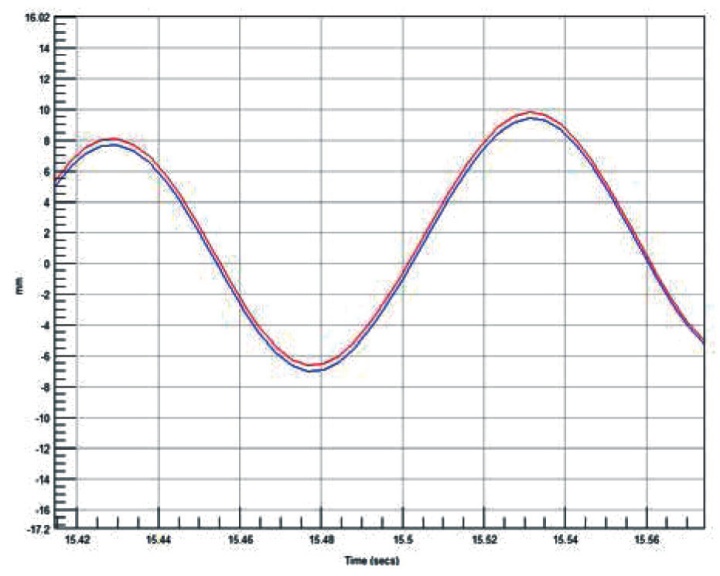
圖 11 時(shí)域?qū)Ρ鹊木植糠糯?/span>
從虛擬迭代34個(gè)通道(六分力、彈簧位移、軸頭加速度和轉(zhuǎn)向橫拉桿)的輸出響應(yīng)信號(hào)與試驗(yàn)數(shù)據(jù)的相對(duì)損傷結(jié)果來看,相對(duì)損傷比(除了六分力信號(hào)My)均在0.5~2之間,對(duì)比精度較高。
左前軸頭加速度仿真與試驗(yàn)的頻域?qū)Ρ冉Y(jié)果如圖12所示(紅色為仿真值,藍(lán)色為試驗(yàn)值)。我們發(fā)現(xiàn),損傷大部分集中在8~12Hz范圍內(nèi),曲線的吻合程度較高。綜上所述,利用虛擬迭代技術(shù),完全再現(xiàn)了試驗(yàn)車的路譜采集過程,能夠獲取車身與懸架安裝點(diǎn)的載荷譜數(shù)據(jù),支持后續(xù)的疲勞耐久性分析工作。

圖 12 左前軸頭加速度頻域?qū)Ρ?/span>
結(jié)論
本文結(jié)合實(shí)測(cè)試驗(yàn)場(chǎng)的相關(guān)規(guī)范,采集了公司試驗(yàn)場(chǎng)的道路載荷譜,并搭建了可用于虛擬迭代的整車多體動(dòng)力學(xué)模型,其中模型的K&C仿真結(jié)果、四個(gè)輪荷與試驗(yàn)數(shù)據(jù)對(duì)標(biāo)良好。應(yīng)用虛擬迭代方法,完全再現(xiàn)了試驗(yàn)車的路譜采集過程,獲得了車身與底盤零部件安裝點(diǎn)的載荷譜數(shù)據(jù),為后期的疲勞耐久性分析提供數(shù)據(jù)支持。
作者:黃小征 米 磊 劉艷華 王 海
工作單位:華晨汽車工程研究院
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 66



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
