




 廣告
廣告





















































智能汽車區(qū)域控制器PDC功能及架構(gòu)設(shè)計(jì)解決方案
2021-12-28 20:20:08· 來(lái)源:焉知 作者:Jessie

從市場(chǎng)趨勢(shì)而言,隨著中國(guó)乘用車市場(chǎng)發(fā)展趨于飽和以及終端消費(fèi)群體年齡結(jié)構(gòu)的變化,如何以新穎且差異化的用戶體驗(yàn),實(shí)用且高端的先進(jìn)技術(shù),打造出有市場(chǎng)競(jìng)爭(zhēng)力的
從市場(chǎng)趨勢(shì)而言,隨著中國(guó)乘用車市場(chǎng)發(fā)展趨于飽和以及終端消費(fèi)群體年齡結(jié)構(gòu)的變化,如何以新穎且差異化的用戶體驗(yàn),實(shí)用且高端的先進(jìn)技術(shù),打造出有市場(chǎng)競(jìng)爭(zhēng)力的產(chǎn)品,是OEM關(guān)心的重中之重;從技術(shù)趨勢(shì)而言,自動(dòng)駕駛行業(yè)內(nèi)都在尋求一個(gè)能滿足以下需求的全新架構(gòu):包括降低電子電氣復(fù)雜度,提高電子電氣架構(gòu)效率,提升總裝生產(chǎn)線效率,實(shí)現(xiàn)更快速的開(kāi)發(fā)和迭代,軟硬件解耦和提升終端用戶體驗(yàn)等等。從這個(gè)角度上講,下一代自動(dòng)駕駛系統(tǒng)趨向于從分布式過(guò)程向集中式過(guò)程實(shí)現(xiàn)統(tǒng)一架構(gòu)。
1、軟件層面:整車的算法控制單元、算力需求單元要求進(jìn)一步集中,功能域控制器將進(jìn)一步發(fā)展形成集中式中央車載計(jì)算中心(平臺(tái));
2、硬件層面:為了增強(qiáng)可擴(kuò)展性、提高通信效率、減少線束長(zhǎng)度、減少硬件實(shí)體重量,包含算法、算力、通信、功能模塊、I/O、電源等硬件資源將被重新規(guī)劃。
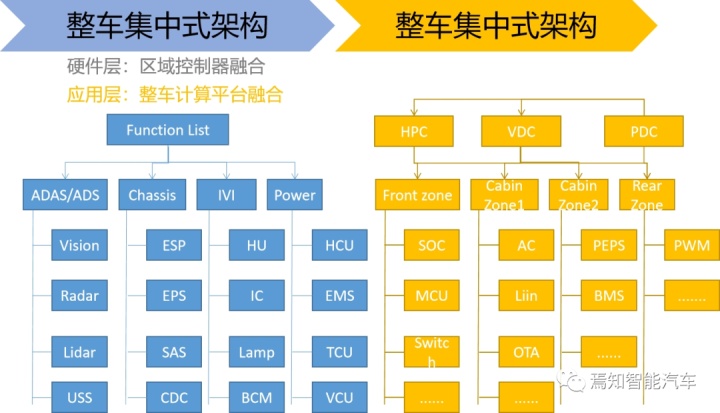
如上提到的集中式域控制器方案的實(shí)現(xiàn)并不是一蹴而就的,主要體現(xiàn)在車身單元本身具備較多的執(zhí)行器單元。包含自動(dòng)駕駛域本身、智能座艙方向、智能底盤方向、原車身控制單元(統(tǒng)稱iBCM)。因此,在真正實(shí)現(xiàn)大域控的中央控制方案之前,自動(dòng)駕駛系統(tǒng)會(huì)階段性的引入諸如智能座艙域控制器,智能底盤域控制器等等。如上的劃分其目的在于打破原有功能邊界,可按照區(qū)域劃分,形成區(qū)域控制器,完成功集能域架構(gòu)漸進(jìn)性的向整車集中式架構(gòu)進(jìn)化。
我們知道面向智能車輛的終極解決方案是實(shí)現(xiàn)面向服務(wù)的自動(dòng)駕駛控制系統(tǒng)SOA。整體來(lái)說(shuō),車輛總體方案偏向于選用中央計(jì)算平臺(tái)+區(qū)域控制的拓?fù)湫问剑钶d車-云一體化的整車級(jí)SOA 軟件架構(gòu)。而階段性的自動(dòng)駕駛控制系統(tǒng)需要一種區(qū)域控制單元PDC(power data centers)對(duì)周圍的電子系統(tǒng)分配電源,收集并分發(fā)大量原始傳感器數(shù)據(jù),并對(duì)這些數(shù)據(jù)進(jìn)行處理以實(shí)現(xiàn)自動(dòng)駕駛命令等。區(qū)域控制器PDC中主要集成以下幾部分功能,包含車身舒適、底盤、動(dòng)力、熱管理、智能駕駛、大數(shù)據(jù)、電源模式、能源消耗數(shù)據(jù)服務(wù)、功能降級(jí)及異常處理、整車標(biāo)定、SOA 服務(wù)等功能。
本文將針對(duì)其中不為人熟知的區(qū)域控制器進(jìn)行詳述。
區(qū)域控制器PDC分布解析
如前所述,區(qū)域控制器PDC是整車物理區(qū)域的不同種傳感器采集/執(zhí)行器驅(qū)動(dòng)的中心樞紐以及區(qū)域數(shù)據(jù)中心??捎行У爻薪诱嚨奈锢斫涌冢瑢?duì)區(qū)域分布的電源進(jìn)行分配,平衡不同的輸入輸出控制等,從而支持智能汽車內(nèi)部的跨域融合。
對(duì)于當(dāng)前整個(gè)自動(dòng)駕駛車輛平臺(tái)而言,整個(gè)平臺(tái)預(yù)計(jì)搭載 PDC 3~4 個(gè)。一般情況下,這些區(qū)域控制器布置于車輛的四個(gè)角處,如果對(duì)自動(dòng)駕駛相關(guān)傳感器的密度、電力需求都很高的場(chǎng)合,可以考慮在B柱附近增加兩個(gè)PDC。
可以參照如下布置位置方式進(jìn)行:

如上圖表示了3個(gè)典型位置的區(qū)域控制器。分別是前艙區(qū)域控制器、座艙區(qū)域控制器、尾艙區(qū)域控制器。各區(qū)域控制器的功能如下:
1、前艙P(yáng)DC
動(dòng)力單元驅(qū)動(dòng)控制;
前燈光系統(tǒng)驅(qū)動(dòng)控制;
前艙傳感器(如前艙周邊4-6顆超聲波雷達(dá)原始數(shù)據(jù)處理);
各前艙控制器傳感器的IO 接口輸入;
前艙控制器(動(dòng)力域控、底盤域控、自動(dòng)駕駛域控)電源分配。
2、座艙P(yáng)DC
座艙域控制器輸入(如超聲波傳感器目標(biāo)處理數(shù)據(jù));
座艙輸出控制指令(如車門、車窗、車燈控制指令)轉(zhuǎn)化;
艙內(nèi)燈光、音頻系統(tǒng)驅(qū)動(dòng)控制;
座艙控制器電源分配。
3、后艙P(yáng)DC
智能底盤、車身舒適系統(tǒng)的 IO 接入(如后艙周邊4-6顆超聲波雷達(dá)原始數(shù)據(jù)處理);
后艙控制器(如智能后視攝像頭、側(cè)后角雷達(dá))電源分配。
一般的,由于前艙區(qū)域控制器與座艙區(qū)域控制器分別為自動(dòng)駕駛控制器及智能座艙控制器提供相應(yīng)的電源、接口、傳感器信號(hào)處理能力,因此該處的區(qū)域控制器是必須配置。而后艙P(yáng)DC實(shí)際上可以根據(jù)其處理的功能而作為選配方案。
區(qū)域控制器PDC功能說(shuō)明
1、整車區(qū)域配電中心
PDC的功能之一是負(fù)責(zé)區(qū)域內(nèi)用電器的供電與用電管理,量化用電行為,提高用電效率與安全性。在下一代自動(dòng)駕駛系統(tǒng)的區(qū)域控制架構(gòu)中,由于需要充分考慮各控制器的供電冗余,對(duì)于區(qū)域控制器而言就需要有兩路電源對(duì)整車進(jìn)行獨(dú)立供電。同時(shí)需要作為二級(jí)電源分配節(jié)點(diǎn),給對(duì)應(yīng)區(qū)域內(nèi)下級(jí)控制器、傳感器或執(zhí)行器提供電源供電管理。
對(duì)于如上提到的冗余供電模型,需要充分考慮與智能電網(wǎng)管理模塊產(chǎn)品的配合設(shè)計(jì)來(lái)完成相應(yīng)的供電架構(gòu),其結(jié)果是完成一套完整的可以適應(yīng)不同自動(dòng)駕駛等級(jí)的靈活的供電方案。如圖所示:

以自動(dòng)駕駛分級(jí)為電源管理分割階段可實(shí)現(xiàn)如下電源能力配置:
基本電源架構(gòu)階段:實(shí)現(xiàn)功能安全的獨(dú)立供電、負(fù)載用電情況記錄與分析,并實(shí)現(xiàn)用電故障診斷與隔離。
L2.5電源架構(gòu)階段:加入智能電網(wǎng)管理模塊產(chǎn)品,針對(duì)ESP、EPS等功能安全要求高的控制器進(jìn)行隔離處理,滿足用電安全,確保功能安全目標(biāo)的完成。
L3+電源架構(gòu)階段:可以在原供電基礎(chǔ)上,增加智能電網(wǎng)管理模塊進(jìn)行控制器冗余供電的隔離,滿足用電安全,確保更高要求的功能安全目標(biāo)的實(shí)現(xiàn)。
對(duì)于區(qū)域控制器的供電需求,需滿足同步供電類型配的電要求為非常電 ECU 供電考慮 PDC 供電或驅(qū)動(dòng)的必要性,30A,45A 為一般配電的經(jīng)驗(yàn)值,后續(xù)可根據(jù)實(shí)際情況調(diào)整,對(duì)于為常電ECU供電時(shí)需要考慮整車睡眠狀態(tài)下還需要繼續(xù)供電,因此需要采用自動(dòng)喚醒的電源供電方式進(jìn)行驅(qū)動(dòng)。此外,需要考慮單路要求的電流消耗不超過(guò)額定最大值,當(dāng)特殊控制器需要保留硬線喚醒時(shí),PDC 需提供喚醒供電。
2、整車區(qū)域通信中心
區(qū)域控制器承擔(dān)了區(qū)域信息中心或網(wǎng)關(guān)部分功能。PDC作為區(qū)域控制單元需要對(duì)其所負(fù)責(zé)的區(qū)域內(nèi)節(jié)控制節(jié)點(diǎn)進(jìn)行通信管理與信息轉(zhuǎn)發(fā),縮短信息通路,提高通信效率與安全性。
目前主流車型的總線帶寬,短期內(nèi)使用一般使用2-5M的CAN-FD或100M以太網(wǎng)就能充分滿足現(xiàn)有通信需求。為了提升系統(tǒng)級(jí)功能安全,則通過(guò)預(yù)留雙路CAN或以太網(wǎng)通信進(jìn)行數(shù)據(jù)備份。考慮到下一代產(chǎn)品中需要面向服務(wù)進(jìn)行開(kāi)發(fā)的SOA需求,區(qū)域控制器通信能力則需要至少預(yù)留一路CAN或以太網(wǎng),并進(jìn)行大帶寬通信,也能夠支持服務(wù)協(xié)議與服務(wù)本身的實(shí)現(xiàn),網(wǎng)絡(luò)拓?fù)浜?jiǎn)圖如下:

PDC 總體可實(shí)現(xiàn)不同類別的傳感器采集以及控制器驅(qū)動(dòng)。根據(jù)不同類型的傳感器,提供不同的采集策略;根據(jù)不同類型的執(zhí)行器,在控制器驅(qū)動(dòng)過(guò)程中,提供不同的驅(qū)動(dòng)策略、驅(qū)動(dòng)斷開(kāi)策略、驅(qū)動(dòng)過(guò)載保護(hù)等。
PDC 中,對(duì)所有感知和驅(qū)動(dòng) IO 涉及終端ECU驅(qū)動(dòng)能力和原始數(shù)據(jù)處理的能力,且對(duì)所有 IO 都需要進(jìn)行接口匹配、信號(hào)濾波等處理。原始數(shù)據(jù)處理采用 CAN 或以太網(wǎng)進(jìn)行傳輸,非實(shí)時(shí)要求的采用以太網(wǎng)傳輸(如顯示交互類),實(shí)時(shí)性要求高的采用 CAN 傳輸(如底盤制動(dòng)、轉(zhuǎn)向、動(dòng)力等)。
3、整車功能驅(qū)動(dòng)控制
區(qū)域控制器作為整車級(jí)部分區(qū)域I/O輸入輸出及控制中心,將由其處理功能單一的節(jié)點(diǎn),向軟件計(jì)算中心集中,且在其中提供底層服務(wù)。這種集成區(qū)域內(nèi)的功能模塊,標(biāo)準(zhǔn)化硬件I/O的采集與驅(qū)動(dòng),可以提高擴(kuò)展性與通用性。
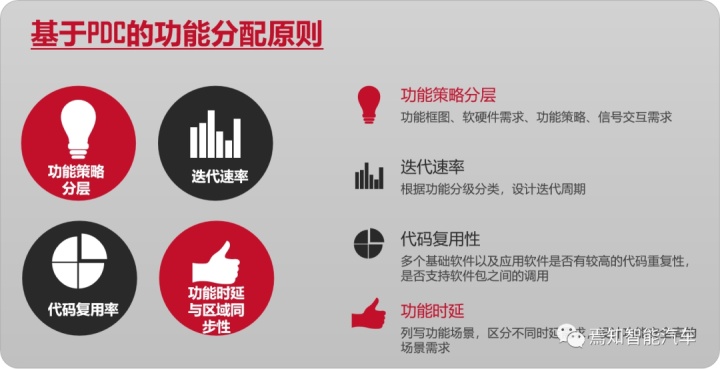
為計(jì)算中心實(shí)現(xiàn)新的復(fù)雜功能或特性提供軟硬件基礎(chǔ),把分配在區(qū)域控制器PDC中的軟件模塊進(jìn)行原子或基礎(chǔ)服務(wù)的封裝,一般在計(jì)算中心中通過(guò)SOME/IP協(xié)議調(diào)用相關(guān)資源,為計(jì)算中心實(shí)現(xiàn)新的復(fù)雜功能或特性提供軟硬件基礎(chǔ)。在新的應(yīng)用軟件中將進(jìn)行功能的重新劃分,劃分原則參照功能策略、分層功能時(shí)延、區(qū)域同步性、代碼復(fù)用率、功能可能的迭代速率、功能安全這幾個(gè)維度進(jìn)行。
對(duì)于如上圖所示針對(duì)整個(gè)車輛功能分配原則包含如下的設(shè)計(jì)性能需求:
①設(shè)計(jì)相關(guān)功能系統(tǒng)框圖,判斷其中硬件需求;
②制定功能策略,列出信號(hào)交互需求;
③分析不同UseCase,判斷是否設(shè)計(jì)跨域交互;
④策略(感知、仲裁、控制、執(zhí)行)分層建模;
⑤根據(jù)不同層級(jí)分配不同的策略到相應(yīng)的控制器中;
⑥對(duì)于時(shí)延要求高的場(chǎng)景,分析分配結(jié)果是否滿足性能要求;
⑦對(duì)于功能安全較高的場(chǎng)景,分析分配結(jié)果是否滿足功能安全要求。
基于SOA服務(wù)的智能汽車功能
下一代智能駕駛汽車需要進(jìn)行面向服務(wù)的SOA設(shè)計(jì),這一過(guò)程需要控制單元參照其所承擔(dān)的服務(wù)功能(車身舒適、AC、底盤、HCU 等)層面進(jìn)行接口統(tǒng)一、服務(wù)轉(zhuǎn)化和封裝管理。用于其計(jì)算平臺(tái)功能調(diào)用,如功能激活、解閉鎖服務(wù)、車窗控制服務(wù)等。

如下將圍繞智能汽車駕駛域進(jìn)行相關(guān)功能控制說(shuō)明。當(dāng)前,PDC 中 ADAS 功能主要集中在簡(jiǎn)單的傳感信息處理上,也即對(duì)其中的12個(gè)超聲波雷達(dá)信號(hào)處理。包含提供如基礎(chǔ)服務(wù)或增強(qiáng)服務(wù)等。12個(gè)超聲波雷達(dá)USS 對(duì)應(yīng)自動(dòng)泊車、代客泊車配置。同時(shí),對(duì)于如上的12個(gè)超聲波雷達(dá),需要根據(jù)其安裝位置分別布置于車身不同的機(jī)艙內(nèi)。如果是前后各一個(gè)PDC的模式,則是分別分配前后六個(gè)USS到兩個(gè)不同的PDC中,如果是4個(gè)PDC模式,則是區(qū)分前左、前右、后左、后右分別各掛3個(gè)USS的方式進(jìn)行信息處理。
PDC 處理超聲波雷達(dá)信息包含如下:
1、原始目標(biāo)位置、速度、加速度等探測(cè)信息;
2、目標(biāo)及報(bào)警信息;
3、車位實(shí)際可用信息;
如上探測(cè)的目標(biāo)、報(bào)警、車位信息需要發(fā)送到泊車控制器、行車控制器、座艙域控制器等用于控制自動(dòng)泊車、低速行車、倒車 AEB 、報(bào)警提示等。
對(duì)于智能汽車來(lái)講,其重點(diǎn)關(guān)注車身舒適及底盤的相關(guān)控制邏輯。以上兩者中,前者對(duì)于實(shí)時(shí)性要求不高,因此,適用于譬如像智能啟動(dòng)、內(nèi)部燈光、電動(dòng)車窗、電腦車門、胎壓監(jiān)測(cè)、電動(dòng)轉(zhuǎn)向柱調(diào)節(jié)等。以上后者中,由于其功能安全要求較高,則需要適配更高的實(shí)時(shí)性和準(zhǔn)確性。當(dāng)然,一般情況下,制動(dòng)相關(guān)的控制會(huì)單獨(dú)放到另外一個(gè)功能安全和控制性能更高的控制器(如車身控制單元VDC)中,但是部分制動(dòng)功能也會(huì)不可避免的放到區(qū)域控制器中,如智能懸架控制中的空氣懸架就會(huì)將傳感器你和執(zhí)行器介入PDC中,并根據(jù)PDC反饋的傳感器狀態(tài)愛(ài)和整車狀態(tài),發(fā)送高度調(diào)節(jié)指令給PDC調(diào)整空氣懸架高度,且通常境況搞下,空氣懸架高度檢測(cè)功能集成到PDC中,定期喚醒監(jiān)測(cè)車身高度。此外,通常前PDC保留EPB控制,集成EPB控制模塊。
同時(shí)為了滿足更高級(jí)別的功能安全需求,PDC 可單獨(dú)搭載 功能安全較高的MCU,向上支持功能安全到 ASILD級(jí)別。算力可支撐基本的傳感器原始信號(hào)處理需求和控制器邏輯運(yùn)算需求,一般會(huì)預(yù)留 50%以上算力。
總結(jié)
下一代自動(dòng)駕駛系統(tǒng)為了實(shí)現(xiàn)SOA架構(gòu)服務(wù)能力,通常采用了AUTOSAR 軟件架構(gòu)、服務(wù)中間件來(lái)支持具有高安全高確定性的軟件部署。中央計(jì)算平臺(tái)上要求底層軟件、底層硬件、應(yīng)用層軟件、應(yīng)用層硬件解耦。作為實(shí)現(xiàn)這一智能服務(wù)平臺(tái)的區(qū)域控制單元,PDC需要進(jìn)行有效的設(shè)備管理及配置管理,盡可能多的幫助中央域控制單元實(shí)現(xiàn)階段性解耦和接口封裝。實(shí)現(xiàn)設(shè)備即插即用,軟硬件隨時(shí)適配。通過(guò)執(zhí)行更簡(jiǎn)單的控制功能,例如燈光、音頻系統(tǒng),從而進(jìn)一步減少控制單元的數(shù)量。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 88



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
