




 廣告
廣告





















































首頁 > 汽車測試技術(shù) > 正文
汽車試驗(yàn):電動(dòng)汽車電驅(qū)動(dòng)總成噪聲品質(zhì)測試評(píng)價(jià)規(guī)范
2022-01-04 20:53:02· 來源:汽車測試網(wǎng)

前 言本文件按照GB/T 1.1—2020《標(biāo)準(zhǔn)化工作導(dǎo)則 第1部分:標(biāo)準(zhǔn)化文件的結(jié)構(gòu)和起草規(guī)則》的規(guī)定起草。請注意本文件的某些內(nèi)容可能涉及專利,本文件的發(fā)布機(jī)構(gòu)不
前 言
本文件按照GB/T 1.1—2020《標(biāo)準(zhǔn)化工作導(dǎo)則 第1部分:標(biāo)準(zhǔn)化文件的結(jié)構(gòu)和起草規(guī)則》的規(guī)定起草。
請注意本文件的某些內(nèi)容可能涉及專利,本文件的發(fā)布機(jī)構(gòu)不承擔(dān)識(shí)別這些專利的責(zé)任。
本文件由電動(dòng)汽車產(chǎn)業(yè)技術(shù)創(chuàng)新戰(zhàn)略聯(lián)盟組織提出。
本文件起草單位:中國汽車工程研究院股份有限公司、上海汽車集團(tuán)股份有限公司、華域汽車電動(dòng)系統(tǒng)有限公司、東風(fēng)汽車集團(tuán)股份有限公司技術(shù)中心、華為技術(shù)有限公司、吉利汽車研究院(寧波)有限公司、西門子電動(dòng)汽車動(dòng)力總成系統(tǒng)(上海)有限公司、蜂巢電驅(qū)動(dòng)科技河北有限公司、舍弗勒(中國)有限公司、尼得科(蘇州)有限公司、青山工業(yè)有限責(zé)任公司、鄭州宇通客車股份有限公司。
本文件起草人:李沛然、顧彥、宋志環(huán)、劉浩、錢新、趙彤航、劉輝、余雷、李文杰、張?jiān)趶?qiáng)、姜艷軍、馬英。
1 范圍
本文件規(guī)定了電動(dòng)汽車電驅(qū)動(dòng)總成及其子系統(tǒng)噪聲品質(zhì)的測試評(píng)價(jià)方法。
本文件適用于電動(dòng)汽車電驅(qū)動(dòng)總成及其子系統(tǒng)。
2 規(guī)范性引用文件
下列文件中的內(nèi)容通過文中的規(guī)范性引用而構(gòu)成本文件必不可少的條款。其中,注日期的引用文件,僅該日期對(duì)應(yīng)的版本適用于本文件;不注日期的引用文件,其最新版本(包括所有的修改單)適用于本文件。
GB 755—2008 旋轉(zhuǎn)電機(jī) 定額和性能
GB/T 1859.3—2015 往復(fù)式內(nèi)燃機(jī)聲壓法聲功率級(jí)的測定 第3部分:半消聲室精密法
GB/T 3241—2010 電聲學(xué)倍頻程和分倍頻程濾波器
GB/T 3767—2016 聲學(xué)聲壓級(jí)測定噪聲聲功率級(jí)和聲能量級(jí)反射面上方近似自由場的工程法
GB/T 3785.1—2010 電聲學(xué)聲級(jí)計(jì) 第1部分:規(guī)范
GB/T 6882—2013 聲學(xué)聲壓法測定噪聲聲功率級(jí)消聲室和半消聲室精密法
GB/T 8170—2008 數(shù)值修約規(guī)則與極限數(shù)值的表示和判定
GB 10069.1—1988 旋轉(zhuǎn)電機(jī)噪聲測定方法及限值 噪聲工程測定方法
GB/T 14097—2018 往復(fù)式內(nèi)燃機(jī)噪聲限值
GB/T 15173—2010 電聲學(xué)聲校準(zhǔn)器
GB/T 18488.1 電動(dòng)汽車用電機(jī)及其控制器 第1部分:技術(shù)要求
GB/T 19596—2017 電動(dòng)汽車術(shù)語
ISO-7779—2010 聲學(xué).信息技術(shù)和通信設(shè)備發(fā)出空氣噪聲的測量(Acoustics—Measurement of airborne noise emitted by information technology and telecommunications equipment)
3 術(shù)語和定義
GB/T 18488.1、GB/T 19596—2017、GB/T 6882—2016界定的以及下列術(shù)語和定義適用于本文件。
3.1 電驅(qū)動(dòng)系統(tǒng) electric drive
由驅(qū)動(dòng)電機(jī)、動(dòng)力電子裝置和將電能轉(zhuǎn)換到機(jī)械能的相關(guān)操縱裝置組成的系統(tǒng)。
3.2 電驅(qū)動(dòng)總成 electric drive system
電動(dòng)汽車動(dòng)力驅(qū)動(dòng)總成單元,包括但不限于以下部分:驅(qū)動(dòng)電機(jī)、變速裝置、電機(jī)控制器等。
3.3 電驅(qū)動(dòng)車橋 electric drive axle
電驅(qū)動(dòng)總成的一種,即帶有電驅(qū)動(dòng)系統(tǒng)的車橋。
3.4 聲壓 sound pressure
p :瞬時(shí)壓強(qiáng)與靜壓強(qiáng)之差。
3.5 聲壓級(jí) sound pressure level
Lp :聲壓平方與基準(zhǔn)聲壓平方之比,取以10為底的對(duì)數(shù)的10倍,用分貝(dB)表示。

式中:
p0——基準(zhǔn)值, p0 = 20μPa 。
3.6 時(shí)間平均聲壓級(jí) time-average sound pressure level
LP,T:在指定的持續(xù)時(shí)間段T(起始于t1,終止于t2)內(nèi),聲壓p平方的時(shí)間均值與基準(zhǔn)值p0平方之比,取以10為底的對(duì)數(shù)的10倍,用分貝(dB)表示。

式中:
p0 ——基準(zhǔn)值, p0 = 20μPa 。
3.7 背景噪聲修正 background noise correction
K1:對(duì)被測量表面的每個(gè)被測聲壓級(jí)進(jìn)行背景噪聲影響的修正。
3.8 環(huán)境修正 environmental correction
考慮反射聲對(duì)位于基準(zhǔn)測量面的平均聲壓級(jí)影響的修正。
3.9 聲功率 sound power
P:通過某一測量面的聲壓p與在該測量面上質(zhì)點(diǎn)振速的法向分量n ? 的乘積在整個(gè)測量面上的積分。
3.10 正驅(qū)動(dòng) positive drive
試驗(yàn)時(shí),從電機(jī)或變(減)速器輸入端提供試驗(yàn)動(dòng)力。
3.11 反驅(qū)動(dòng) reverse drive
試驗(yàn)時(shí),從測功機(jī)或變(減)速器輸出端提供試驗(yàn)動(dòng)力。
3.12 蠕行 worm
電驅(qū)動(dòng)系統(tǒng)驅(qū)動(dòng)車輛緩慢運(yùn)動(dòng)。
3.13 突出比 prominence ratio
被研究的以音調(diào)為中心的臨界頻帶的功率和兩相鄰臨界頻帶功率的比值。
3.14 電驅(qū)動(dòng)總成噪聲品質(zhì)等級(jí) electric drive sound quality grade
按電驅(qū)動(dòng)總成測定的噪聲聲功率級(jí)和突出比(Prominence Ratio)大小進(jìn)行的劃分。
4 測試環(huán)境和測量儀器
4.1 背景噪聲準(zhǔn)則
4.1.1 環(huán)境要求
若無特殊要求,所有試驗(yàn)應(yīng)在滿足如下要求的環(huán)境條件中進(jìn)行:
a) 半消聲室環(huán)境溫度:(25±2)℃;
b) 相對(duì)濕度:40%~80%;
c) 海拔:不超過1000 m,若超過1000 m 參照GB 755—2008 相關(guān)規(guī)定執(zhí)行。
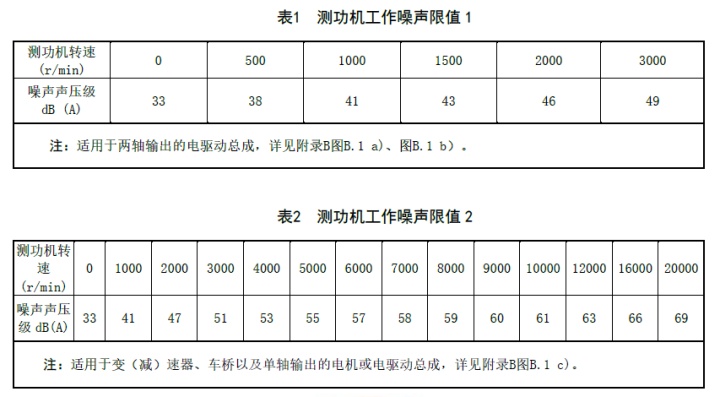
4.1.2 工作背景噪聲
將被測件按照實(shí)際測試時(shí)的布置方式安裝在臺(tái)架上,斷開被測件與測功機(jī)之間的連接,保持測功機(jī)和測量系統(tǒng)正常運(yùn)行,測點(diǎn)布置保持與實(shí)際測試一致,詳細(xì)布置參照附錄A。測功機(jī)空載運(yùn)行,測量各轉(zhuǎn)速的A計(jì)權(quán)噪聲有效值并進(jìn)行平均,針對(duì)不同的類型被測件有不同的限值,但不得高于下表中所限定的數(shù)值。
4.2 測試環(huán)境聲學(xué)合適性原則
半消聲室的聲學(xué)環(huán)境應(yīng)符合GB/T 6882附錄A的規(guī)定。
半消聲室內(nèi)除地面外應(yīng)沒有其他聲反射物,對(duì)于必要的工裝(支架、連接法蘭等)、線束、冷卻管路有較大反射面的部件應(yīng)做聲學(xué)處理。反射面(地面)應(yīng)超出測量表面投影0.75 m,反射面的吸聲系數(shù)在測試頻率范圍內(nèi)應(yīng)小于0.06。
4.3 測量儀器
傳聲器、記錄儀、線纜等聲學(xué)測試設(shè)備應(yīng)滿足GB/T 3785.1中1級(jí)的要求,濾波器應(yīng)滿足IEC 61260中1級(jí)的要求。
聲校準(zhǔn)器應(yīng)滿足GB/T 15173規(guī)定的1級(jí)儀器的要求。在每次測量前后,每個(gè)測量系統(tǒng)應(yīng)在測試頻率范圍內(nèi)一個(gè)或多個(gè)頻率上用聲校準(zhǔn)器進(jìn)行校準(zhǔn),每次系列測量前后測量系統(tǒng)不做調(diào)整的校準(zhǔn)讀數(shù)的差值應(yīng)小于或等于0.3 dB,否則系列測量無效。
4.4 測試準(zhǔn)備
4.4.1 樣件檢查
驅(qū)動(dòng)電機(jī)、車橋、減(變)速器等樣件應(yīng)結(jié)構(gòu)完整,空轉(zhuǎn)靈活且無異響、卡滯,緊固件完整且無損并按整車使用狀態(tài)要求緊固力矩?cái)Q緊并安裝。樣件表面應(yīng)無破損、變形、銹蝕等目測可見的異常。樣件各結(jié)合面和密封處應(yīng)密封良好,不應(yīng)有滲漏油液。其他應(yīng)滿足GB/T 18488.1要求。
4.4.2 試驗(yàn)前準(zhǔn)備
包含齒輪傳動(dòng)的樣件在進(jìn)行噪聲品質(zhì)測試時(shí),應(yīng)對(duì)樣件進(jìn)行磨合處理,其要求如下:
a) 以電機(jī)最高轉(zhuǎn)速50%為輸入轉(zhuǎn)速,±10 r/min;
b) 以電機(jī)最大轉(zhuǎn)矩50%為輸入轉(zhuǎn)矩,±5 Nm;
c) 正驅(qū)動(dòng)磨合時(shí)間不少于2 小時(shí),反驅(qū)動(dòng)磨合時(shí)間不小于1 小時(shí);
d) 潤滑油的油品和油量按測試對(duì)象設(shè)計(jì)規(guī)定添加。
試驗(yàn)過程中,潤滑油油溫不應(yīng)超過最高許用溫度,且溫度-時(shí)間曲線平滑無突變。
5 測試對(duì)象
5.1 概述
本文件使用的電驅(qū)動(dòng)總成及電機(jī)典型結(jié)構(gòu)參見附錄B。
5.2 安裝條件
5.2.1 電動(dòng)動(dòng)力系統(tǒng)
包括以下要求:
a) 安裝方式應(yīng)與正常使用時(shí)相同,宜采用原車懸置系統(tǒng)和傳動(dòng)軸。若不能使用原車懸置系統(tǒng)可使用專用橡膠塊(推薦使用三塊厚度為12 mm、含膠量為70%的普通橡膠塊,在電驅(qū)動(dòng)力系懸置安裝處與其連接)代替原車懸置系統(tǒng),但應(yīng)保證安裝后姿態(tài)與原車安裝狀態(tài)一致;
b) 應(yīng)保證樣件與負(fù)載測功機(jī)之間的連接不為剛性。傳動(dòng)軸宜按照整車安裝角度安裝,無法按整車安裝角度安裝的采用水平位置安裝;
c) 對(duì)于考慮電機(jī)控制器產(chǎn)生的噪聲或電機(jī)控制器與驅(qū)動(dòng)電機(jī)集成為一體的驅(qū)動(dòng)電機(jī)系統(tǒng),應(yīng)直接按原車狀態(tài)安裝。對(duì)于非集成式驅(qū)動(dòng)電機(jī)系統(tǒng),且電機(jī)控制器與驅(qū)動(dòng)電機(jī)可分離,應(yīng)將電機(jī)控制器進(jìn)行聲學(xué)處理或可裝在試驗(yàn)環(huán)境之外。
5.2.2 驅(qū)動(dòng)電機(jī)系統(tǒng)
包括以下要求:
a) 驅(qū)動(dòng)電機(jī)與負(fù)載測功機(jī)之間連接應(yīng)采用柔性連接;
b) 驅(qū)動(dòng)電機(jī)安裝狀態(tài)應(yīng)與原車安裝狀態(tài)保持一致。對(duì)于帶懸置系統(tǒng)的驅(qū)動(dòng)電機(jī),安裝方式參照5.2.1;
c) 電機(jī)控制器安裝方式參照5.2.3。
5.2.3 電機(jī)控制器
若單獨(dú)測量電機(jī)控制器噪聲,宜將其平穩(wěn)安置于半消聲室內(nèi)反射面上測量。
5.2.4 車橋
包括以下要求:
a) 車橋宜使安裝姿態(tài)保持與原車狀態(tài)一致;
b) 車橋與負(fù)載測功機(jī)之間應(yīng)采用柔性連接。
5.2.5 變(減)速器
變(減)速器應(yīng)使用剛性安裝支撐方式,安裝姿態(tài)與原車狀態(tài)保持一致。通過原車傳動(dòng)軸與負(fù)載測功機(jī)連接。傳動(dòng)軸與驅(qū)動(dòng)測功機(jī)之間應(yīng)確保柔性連接。傳動(dòng)軸宜與原車狀態(tài)相同安裝角安裝,或采用水平安裝。(傳動(dòng)軸安裝角度宜與原車狀態(tài)保持一致)。
6 表面聲壓級(jí)的測量與計(jì)算
6.1 概述
根據(jù)被測件結(jié)構(gòu),在附錄A中選擇一個(gè)合適的測量方法進(jìn)行聲壓級(jí)的測定。
6.2 運(yùn)行工況
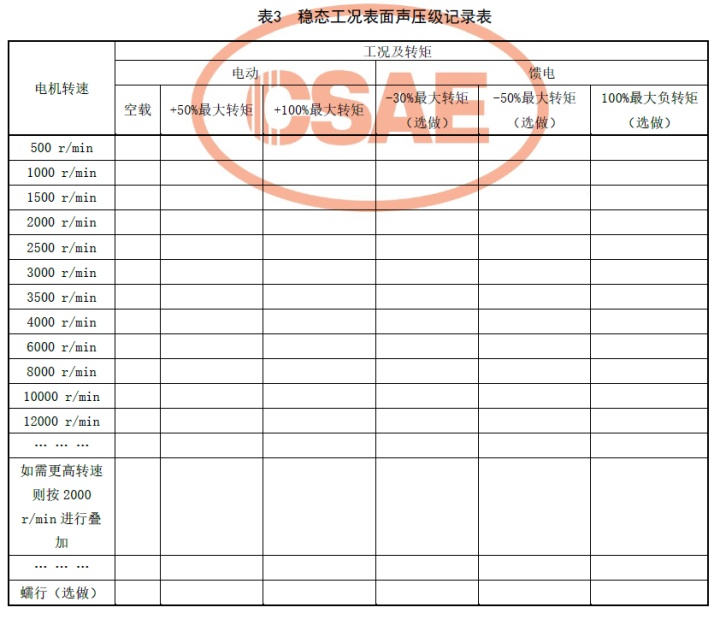
6.2.1 穩(wěn)態(tài)工況
以正驅(qū)動(dòng)為主要運(yùn)行工況,正驅(qū)動(dòng)工況包括電動(dòng)和饋電兩種狀態(tài)。反驅(qū)動(dòng)可參考正驅(qū)動(dòng)選做。參考表3所規(guī)定的電機(jī)(或減速器、變速器輸入端)轉(zhuǎn)速和轉(zhuǎn)矩進(jìn)行測量,其中最高轉(zhuǎn)速不得超過電機(jī)最高工作轉(zhuǎn)速。(可根據(jù)實(shí)車工況依據(jù)傳動(dòng)比和輪胎規(guī)格進(jìn)行換算,不得超過該車型最高限速的1.17倍)。表中轉(zhuǎn)速間隔為2000 r/min,或者可自定義轉(zhuǎn)速間隔。
針對(duì)多電機(jī)電驅(qū)動(dòng)總成或兩檔及多檔位變速器進(jìn)行試驗(yàn)時(shí),各電機(jī)工作狀態(tài)、各個(gè)檔位應(yīng)根據(jù)實(shí)車實(shí)際使用車速和標(biāo)定工況確定得到的對(duì)應(yīng)電機(jī)轉(zhuǎn)速,如額定工作點(diǎn)、常用工作點(diǎn)和特殊工作點(diǎn)等;若無法得到對(duì)應(yīng)的電機(jī)轉(zhuǎn)速信息,則對(duì)各個(gè)檔位的所有電機(jī)轉(zhuǎn)速范圍(建議所有電機(jī)轉(zhuǎn)速范圍內(nèi)至少選取5個(gè)等分的轉(zhuǎn)速測點(diǎn))進(jìn)行試驗(yàn)。
注:以P215/50R17型輪胎為例:限速140 km/h,令常用速度系數(shù)1.17,即最高車速140 km/h;傳動(dòng)比為10;則最高
轉(zhuǎn)速取整為:12000 r/min。
6.2.2 動(dòng)態(tài)工況
以正驅(qū)動(dòng)為主要運(yùn)行工況,正驅(qū)動(dòng)工況包括電動(dòng)和饋電兩種狀態(tài)。反驅(qū)動(dòng)可參考正驅(qū)動(dòng)選做。,參考表4所所規(guī)定的電機(jī)(或減速器、變速器輸入端)轉(zhuǎn)速和轉(zhuǎn)矩進(jìn)行測量,最高轉(zhuǎn)速按穩(wěn)態(tài)工況最高轉(zhuǎn)速確定。記錄整個(gè)電機(jī)轉(zhuǎn)速變化范圍內(nèi)各轉(zhuǎn)速點(diǎn)和對(duì)應(yīng)轉(zhuǎn)矩工況下的表面聲壓級(jí)和噪聲頻譜。轉(zhuǎn)矩包含
但不限于空載、+50%最大轉(zhuǎn)矩、+100%最大轉(zhuǎn)矩、-30%最大轉(zhuǎn)矩、-50%最大轉(zhuǎn)矩(選做)、-100%最大轉(zhuǎn)矩(選做)。轉(zhuǎn)速上升/下降速率宜為200 r/min。
針對(duì)多電機(jī)電驅(qū)動(dòng)總成或兩檔及多檔位變速器進(jìn)行試驗(yàn)時(shí),與穩(wěn)態(tài)工況時(shí)系統(tǒng),轉(zhuǎn)速上升/下降速率宜為200 r/min。

6.3 表面聲壓級(jí)的計(jì)算
所有傳聲器位置處測得的聲壓級(jí)平均值按式(3)計(jì)算,單位為分貝(dB)。

式中:
Lpi ——第i 個(gè)傳聲器位置的聲壓級(jí);
n ——傳聲器位置個(gè)數(shù)。
7 聲功率級(jí)的測量與計(jì)算
7.1 概述
考慮到不同結(jié)構(gòu)的電驅(qū)動(dòng)總成的布置形式,本文件推薦使用兩種不同聲功率級(jí)測量方式。
測量附錄B中圖B.1 a)、B.1 b)的電驅(qū)動(dòng)總成可按照半消聲室環(huán)境的平行六面體測量面進(jìn)行測量,如附錄A圖A.1所示;附錄B中圖B.1 a)、B.1 b) 、B.1 c)的驅(qū)動(dòng)電機(jī)、變(減)速器、車橋和圖B.1 c)的電驅(qū)動(dòng)總成可按照具有兩個(gè)反射面聲學(xué)環(huán)境的平行六面體測量面進(jìn)行測量,如圖A.3所示。
7.2 聲功率級(jí)的測量與計(jì)算
測量面與傳聲器布置參考GB/T 3767—2016標(biāo)準(zhǔn)執(zhí)行,聲功率的測量與計(jì)算方法參考GB/T 3767—2016的8.2節(jié)。其中,測得聲功率級(jí)的最大允許偏差可參考GB/T 6882—2016規(guī)定的10.4節(jié)標(biāo)準(zhǔn)偏差典型值。復(fù)現(xiàn)性標(biāo)準(zhǔn)偏差的典型上限值如表5所示。

8 背景噪聲修正
當(dāng)背景噪聲聲壓級(jí)和測得被測樣件噪聲聲壓級(jí)差距不大時(shí)(<15dB),需對(duì)測得噪聲聲壓級(jí)進(jìn)行背景噪聲修正。通過被測件運(yùn)行時(shí)表面聲壓級(jí)Lps 和背景噪聲聲壓級(jí) LpB 之差△Lp 來確定是否修正。修正系數(shù)K(單位dB)由式(4)得到:
式中:
△Lp=Lps-LpB
當(dāng)△Lp≥15dB時(shí),無需修正;
當(dāng)6dB≤△Lp<15dB時(shí),按K 值修正;
當(dāng)△Lp<6dB時(shí),測試結(jié)果不可用。
9 記錄內(nèi)容
9.1 概述
9.2~9.5的信息和內(nèi)容應(yīng)被收集和記錄。
9.2 被測件信息
9.2.1 基本參數(shù)
包含但不限于型號(hào)、電機(jī)類型、尺寸、所帶附件、工作電壓、驅(qū)動(dòng)電機(jī)額定功率/轉(zhuǎn)速、額定轉(zhuǎn)矩/轉(zhuǎn)速、峰值功率/轉(zhuǎn)速、峰值轉(zhuǎn)矩/轉(zhuǎn)速、最高轉(zhuǎn)速、減(變)速箱齒輪齒數(shù)、電機(jī)極對(duì)數(shù)、定子齒槽數(shù)、轉(zhuǎn)子齒槽數(shù)、制造廠家、出廠日期等。
9.2.2 安裝條件
包含但不限于基座特性及電驅(qū)動(dòng)總成與其聯(lián)接方式、電驅(qū)動(dòng)總成與測功機(jī)的聯(lián)接方式、電驅(qū)動(dòng)總成安裝高度、安裝姿態(tài)、控制器布置等。
9.2.3 監(jiān)控參數(shù)
包括但不限于測試過程中的電流、電壓、轉(zhuǎn)速、轉(zhuǎn)矩、功率、冷卻液溫度、齒輪箱油的溫度等。
9.3 聲學(xué)環(huán)境
9.3.1 測試環(huán)境的描述(包括半消聲室自由場半徑、截止頻率,以及被測聲源的位置草圖)。
9.3.2 噪聲測試時(shí)半消聲室內(nèi)的氣象狀況(包括大氣壓、溫度、相對(duì)濕度)。
9.4 測量儀器
9.4.1 測量儀器的描述,包括名稱、型號(hào)、編號(hào)和制造商。
9.4.2 聲校準(zhǔn)器和測量系統(tǒng)等的檢定方法、日期和結(jié)果。
9.5 聲學(xué)數(shù)據(jù)
9.5.1 測量方法及準(zhǔn)確度等級(jí)。
9.5.2 基準(zhǔn)體尺寸、測量距離、傳聲器位置及其數(shù)目。
9.5.3 表面聲壓級(jí)p L 。
9.5.4 聲功率級(jí)w L 。
9.5.5 突出比。
10 突出比評(píng)價(jià)方法
10.1 確定中間頻帶
設(shè)中間帶寬為△fm,中間頻率為 fm,中間頻帶下限頻率為fm,l ,中間上限頻率為fm,u ,中間頻帶邊界頻率計(jì)算如式(5)~(8):
當(dāng)中心頻率fm≤500Hz 時(shí):

若中心頻率fm>500Hz :

其中△fm按式(9)計(jì)算
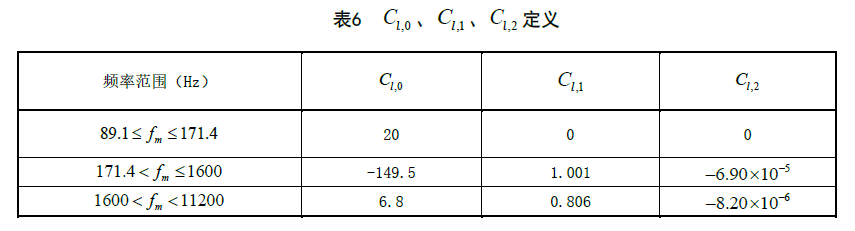
10.2 下臨界頻帶確定
下臨界頻帶與中間頻帶相連,下臨界頻帶上限頻率與中間頻帶下限頻率相同為fm,l,因此只需求解下臨界頻帶下限頻率fl ,l 。

式中:
fm ——所關(guān)注的中心頻率;
Cl ,0、Cl ,1 、Cl ,2 定義如表6所示。
10.3 上臨界頻帶確定
上臨界頻帶與中間頻帶相連,上臨界頻帶下限頻率與中間頻帶上限頻率相同為fm,l,因此只需求解上臨界頻帶上限頻率fu,u。

式中:
fm ——所關(guān)注的中心頻率;
Cu,0 、Cu,1 、Cu,2 定義如表7 所示。

10.4 突出比確定
當(dāng)關(guān)注中心頻率高于171.4 Hz時(shí),突出比△Lp 計(jì)算式(12)和式(13)所示,單位(dB):

式中:
Lp,m ——中間頻帶聲壓級(jí);
Lp,l——下臨界頻帶聲壓級(jí);
Lp,u ——上臨界頻帶聲壓級(jí)。
當(dāng)關(guān)注中心頻率小于等于171.4 Hz時(shí),突出比△Lp 計(jì)算如下,單位(dB):

式中:
Lp,m ——中間頻帶聲壓級(jí);
Lp,l ——下臨界頻帶聲壓級(jí);
Lp,u ——上臨界頻帶聲壓級(jí);
△fl ——下臨界頻帶帶寬。
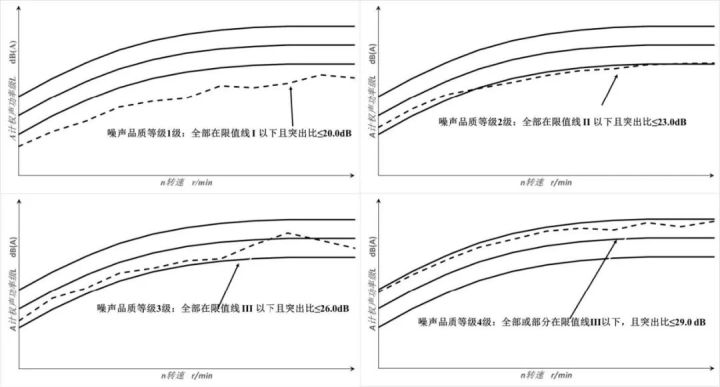
10.5 電驅(qū)動(dòng)總成噪聲品質(zhì)等級(jí)評(píng)定及標(biāo)識(shí)
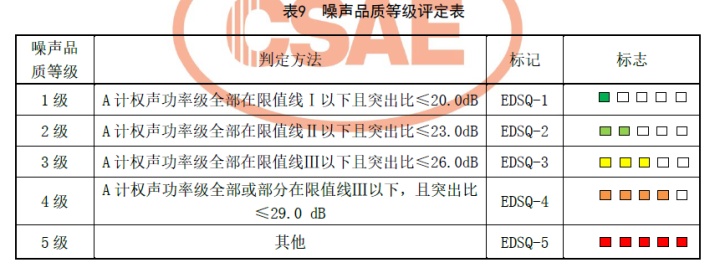
根據(jù)6.2中所有運(yùn)行工況下電驅(qū)動(dòng)總成的A計(jì)權(quán)聲功率級(jí)、突出比測定值和計(jì)算得到的對(duì)應(yīng)工況的A計(jì)權(quán)聲功率級(jí)、突出比限值,來評(píng)定電驅(qū)動(dòng)總成噪聲品質(zhì)等級(jí)及標(biāo)識(shí)。其中,A計(jì)權(quán)聲功率級(jí)測定值為五個(gè)測點(diǎn)得到的A計(jì)權(quán)聲功率級(jí)的平均值,突出比測定值為五個(gè)測點(diǎn)中突出比的最大值。按照GB/T 8170規(guī)定的修約值比較法判定電驅(qū)動(dòng)總成噪聲品質(zhì)測定值是否滿足相應(yīng)等級(jí)的限值要求。其中,A計(jì)權(quán)聲功率級(jí)限值線Ⅰ、Ⅱ、Ⅲ如圖1所示;A計(jì)權(quán)聲功率級(jí)限值線公式如表8所示。噪聲等級(jí)評(píng)定典型示例如圖2所示;噪聲品質(zhì)等級(jí)評(píng)定表如表9所示。
電驅(qū)動(dòng)總成分為1級(jí)噪聲品質(zhì)電驅(qū)動(dòng)總成、2級(jí)噪聲品質(zhì)電驅(qū)動(dòng)總成、3級(jí)噪聲品質(zhì)電驅(qū)動(dòng)總成、4級(jí)噪聲品質(zhì)電驅(qū)動(dòng)總成、5級(jí)噪聲品質(zhì)電驅(qū)動(dòng)總成,1級(jí)噪聲品質(zhì)最好,5級(jí)噪聲品質(zhì)最差。
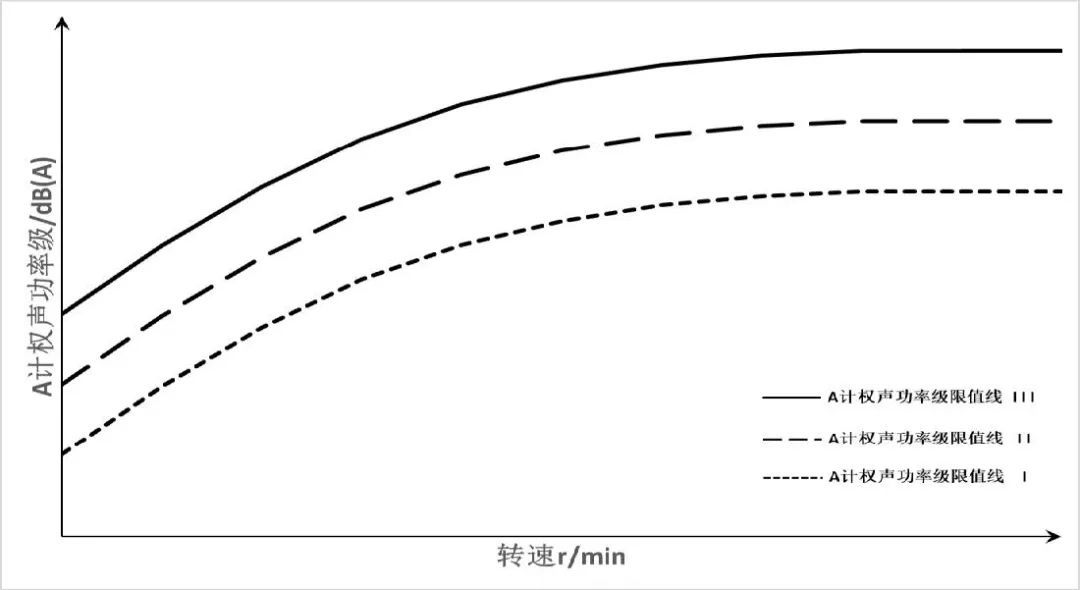
圖1 A 計(jì)權(quán)聲功率級(jí)限值線Ⅰ、Ⅱ、Ⅲ圖示
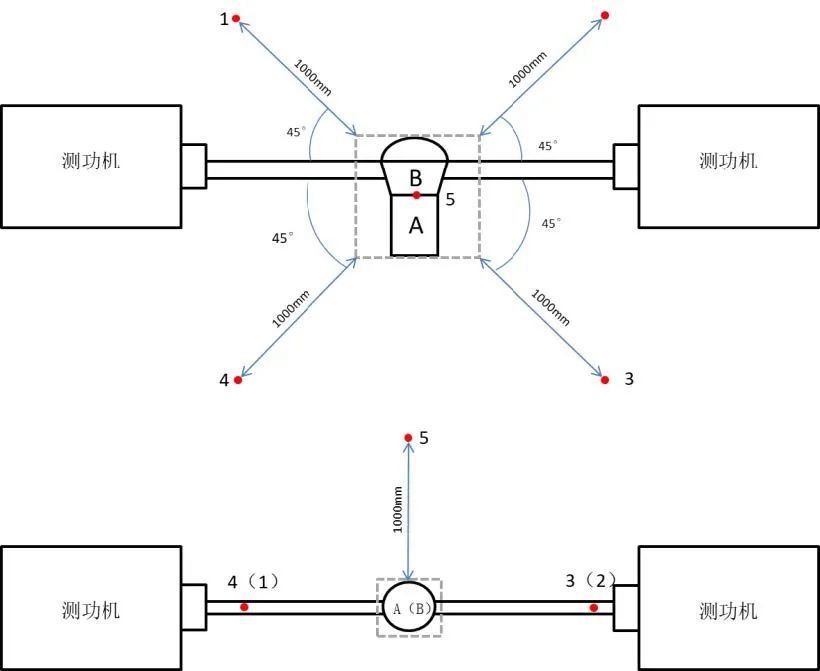
圖2 噪聲等級(jí)評(píng)定典型示例圖
附 錄 A
(規(guī)范性)
電驅(qū)動(dòng)總成參考測點(diǎn)布置
根據(jù)不同的被測件形式,應(yīng)該選用不同的測點(diǎn)布置方案,測點(diǎn)布置距離被測件測量面均為1000 mm。
注:測量面為包含整個(gè)聲源的最小假想矩形六面體的外表面。
附錄B中圖B.1 a)所示的結(jié)構(gòu)應(yīng)采用方案一(推薦)或方案二進(jìn)行測點(diǎn)布置。
a) 方案一測點(diǎn)布置俯視圖及主視圖
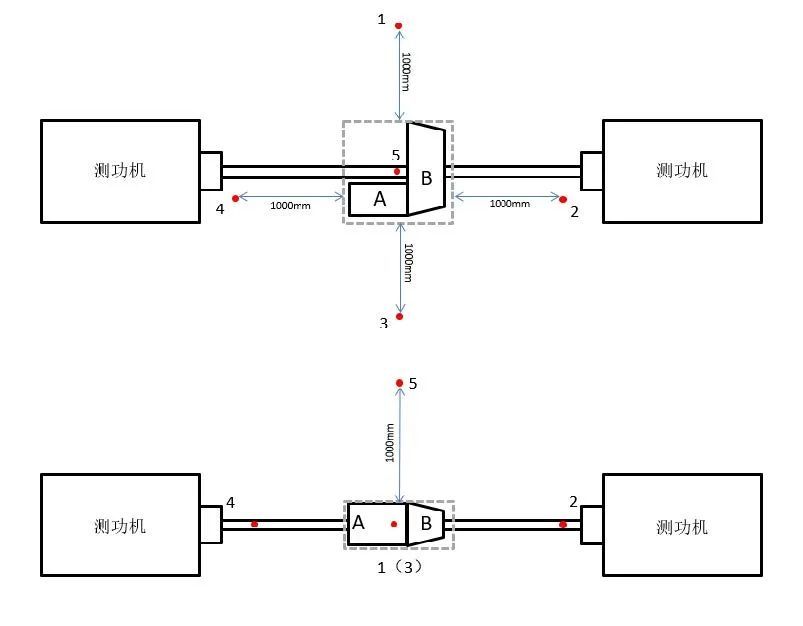
b) 方案二測點(diǎn)布置俯視圖及主視圖
圖A.1 方案一、方案二測點(diǎn)布置俯視圖及主視圖
說明:該測點(diǎn)布置共使用5個(gè)傳聲器,其中1、2、3、4號(hào)傳聲器距離被測件測量面1000 mm,與驅(qū)動(dòng)半軸呈45°夾角,且高度與驅(qū)動(dòng)半軸高度相同;5號(hào)傳聲器位于被測件測量面中心正上方,距離為1000 mm。
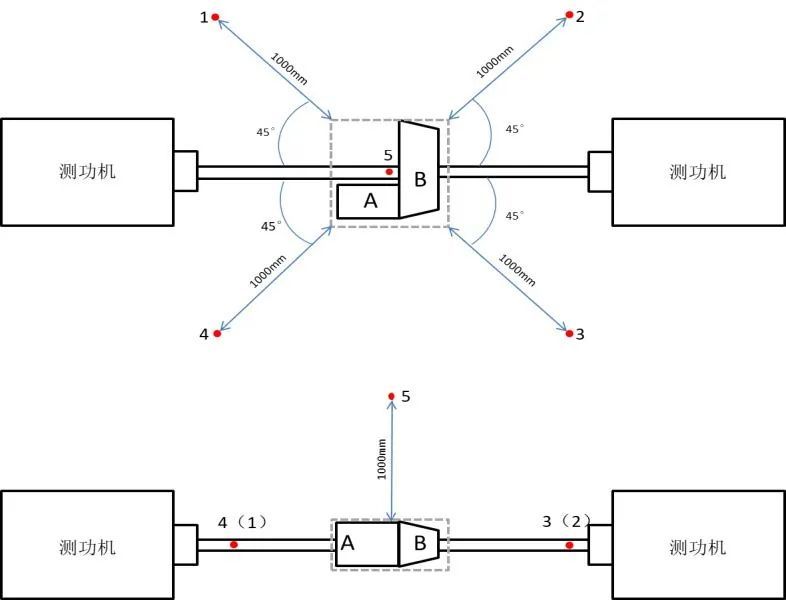
附錄B中圖B.1 b)所示的結(jié)構(gòu)應(yīng)采用方案三(推薦)或方案四進(jìn)行測點(diǎn)布置。
a) 方案三測點(diǎn)布置俯視圖及主視圖
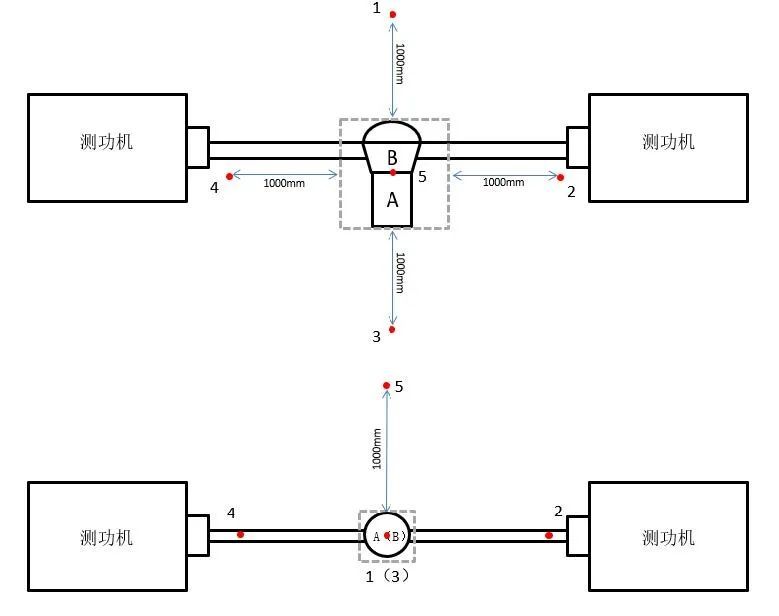
b) 方案四測點(diǎn)布置俯視圖及主視圖
圖A.2 方案三、方案四測點(diǎn)布置俯視圖及主視圖
說明:該測點(diǎn)布置共使用5個(gè)傳聲器,其中1、2、3、4號(hào)傳聲器距離被測件測量面1000 mm,與驅(qū)動(dòng)半軸呈45°夾角,且高度與驅(qū)動(dòng)半軸高度相同;5號(hào)傳聲器位于被測件測量面中心正上方,距離為1000 mm。
附錄B中圖B.1 a)所示結(jié)構(gòu)的變(減)速器應(yīng)采用方案三進(jìn)行測點(diǎn)布置。

圖A.3 方案三測點(diǎn)布置俯視圖及主視圖
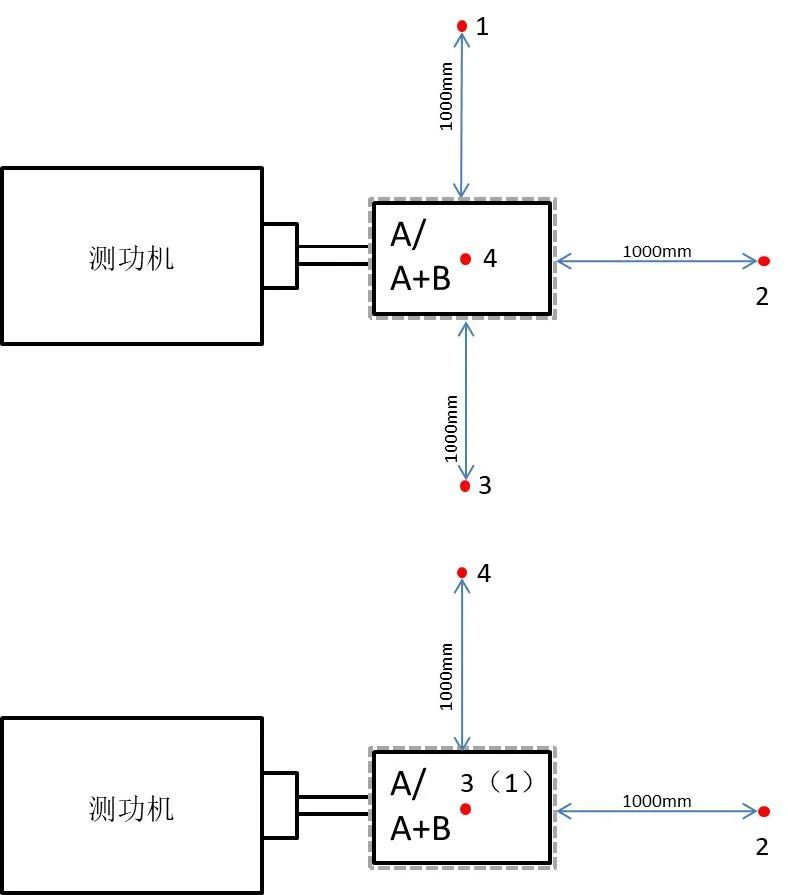
圖A.4 方案四測點(diǎn)布置俯視圖及主視圖
說明:該測點(diǎn)布置共使用4個(gè)傳聲器,其中1、2、3號(hào)傳聲器距離被測件測量面1000 mm,與軸平行或垂直,且高度與軸高度相同;4號(hào)傳聲器位于被測件測量面中心正上方,距離為1000 mm。
附 錄 B
(規(guī)范性)
電驅(qū)動(dòng)總成典型適用結(jié)構(gòu)
電驅(qū)動(dòng)總成在布置形式上有多種結(jié)構(gòu),圖B.1所示的結(jié)構(gòu)適用于本文件,其中A代表驅(qū)動(dòng)電機(jī)系統(tǒng),B代表傳動(dòng)系。對(duì)于含多個(gè)驅(qū)動(dòng)電機(jī)系統(tǒng)和/或多個(gè)傳動(dòng)系的單個(gè)電驅(qū)動(dòng)總成同樣適用于本文件。
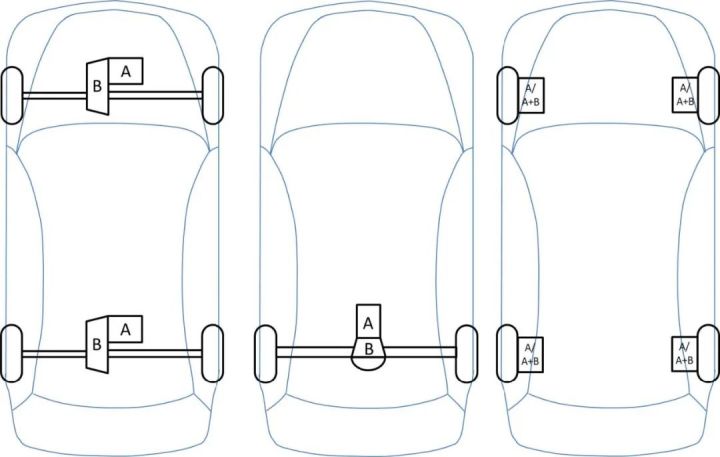
a) 前置前驅(qū)、后置后驅(qū)或四驅(qū) b) 后置后驅(qū) c) 前輪驅(qū)動(dòng)或后輪驅(qū)動(dòng)或四驅(qū)
圖B.1 電驅(qū)動(dòng)總成典型適用結(jié)構(gòu)
說明:
——圖B.1 a)所示結(jié)構(gòu)的驅(qū)動(dòng)形式可能是前置前驅(qū)、后置后驅(qū)或四驅(qū),其中A 和B 方向可以互換;
——圖B.1 b)所示結(jié)構(gòu)的驅(qū)動(dòng)形式是后置后驅(qū),其中A 可以橫置或縱置;
——圖B.1 c)所示結(jié)構(gòu)的驅(qū)動(dòng)形式可能是前輪驅(qū)動(dòng)或后輪驅(qū)動(dòng)或四驅(qū),布置在每個(gè)車輪上的驅(qū)動(dòng)系統(tǒng)是驅(qū)動(dòng)電機(jī)系統(tǒng)或電驅(qū)動(dòng)總成。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 63



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
