




 廣告
廣告





















































首頁(yè) > 汽車測(cè)試技術(shù) > 正文
汽車轉(zhuǎn)向抖動(dòng)問(wèn)題的改進(jìn)方法
2022-01-05 09:07:46· 來(lái)源:時(shí)代汽車

摘要:本文根據(jù)汽車加速測(cè)試發(fā)現(xiàn)汽車轉(zhuǎn)向某轉(zhuǎn)數(shù)下存在抖動(dòng)現(xiàn)象,經(jīng)過(guò)路徑徑查找分析,快速找出由于發(fā)動(dòng)機(jī) Z 向到方向盤(pán)的響應(yīng)傳遞路徑存在問(wèn)題,并找出問(wèn)題根源
摘 要:本文根據(jù)汽車加速測(cè)試發(fā)現(xiàn)汽車轉(zhuǎn)向某轉(zhuǎn)數(shù)下存在抖動(dòng)現(xiàn)象,經(jīng)過(guò)路徑徑查找分析,快速找出由于發(fā)動(dòng)機(jī) Z 向到方向盤(pán)的響應(yīng)傳遞路徑存在問(wèn)題,并找出問(wèn)題根源?;诜抡媾c試驗(yàn)對(duì)標(biāo)后模型進(jìn)行問(wèn)題改進(jìn),最終轉(zhuǎn)向抖動(dòng)問(wèn)題得到明顯改善。
關(guān)鍵詞:方向盤(pán)抖動(dòng) TPA 對(duì)標(biāo)優(yōu)化
1 引言
汽車轉(zhuǎn)向系統(tǒng)的振動(dòng)的主要表現(xiàn)形式為方向盤(pán)的振動(dòng),是影響整車 NVH 性能的重要因素之一。轉(zhuǎn)向系統(tǒng)的振動(dòng)通過(guò)方向盤(pán)直接被駕駛員所感知,長(zhǎng)時(shí)間處于抖動(dòng)狀態(tài),駕駛員會(huì)產(chǎn)生駕駛疲勞,煩躁,嚴(yán)重會(huì)引起交通事故。因此,對(duì)汽車轉(zhuǎn)向抖動(dòng)問(wèn)題的研究具有極其重要的實(shí)際意義。
2 汽車轉(zhuǎn)向抖動(dòng)問(wèn)題分析
發(fā)動(dòng)機(jī)加速時(shí)在 2196RPM 處超標(biāo)。因此可以通過(guò)路徑貢獻(xiàn)量分析查找路徑貢獻(xiàn)最大的來(lái)源。
2.1 問(wèn)題查找
傳遞路徑分析方法(TPA)即是一個(gè)有效的查找整車 NVH 問(wèn)題的方法。由于傳遞路徑分析中考慮來(lái)自各方向不同路徑的所有貢獻(xiàn)量構(gòu)成的總響應(yīng)。通過(guò) TPA 找出對(duì)車內(nèi)振動(dòng)主導(dǎo)的路徑,通過(guò)優(yōu)化具體路徑,使車內(nèi)振動(dòng)噪聲控制在目標(biāo)之內(nèi)。汽車的振動(dòng)基本是通過(guò)激勵(lì)源、路徑和接受體三部分組成。考慮到汽車受到多個(gè)激勵(lì)力作用,假設(shè)車身結(jié)構(gòu)為線性系統(tǒng),在這系統(tǒng)上所有激勵(lì)力的分量和某接受體形成總的響應(yīng)系統(tǒng)。這個(gè)由結(jié)構(gòu)力產(chǎn)生的響應(yīng)表示為:
根據(jù)公式(1)為Pjtot為系統(tǒng)振動(dòng)總響應(yīng),Pji為激勵(lì)點(diǎn)到響應(yīng)點(diǎn)的傳遞函數(shù)(FRF),Fi為激勵(lì)源載荷[1]。因此找到主要路徑才能快速解決問(wèn)題,直接找到引起抖動(dòng)的根源。
2.2 TPA 貢獻(xiàn)量分析
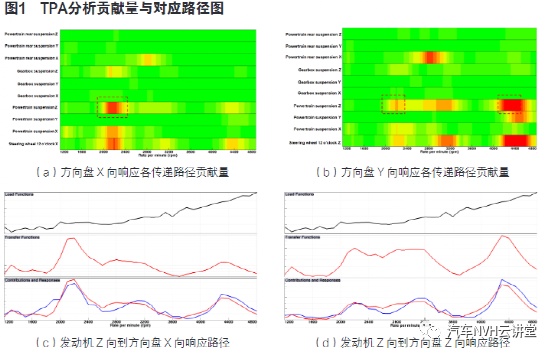
發(fā)動(dòng)機(jī)激勵(lì)共 9 個(gè)分量,每個(gè)分量到方向盤(pán)X或Z向共9條路徑,如圖1所示。影響方向盤(pán)X向主要由發(fā)動(dòng)機(jī)Z向貢獻(xiàn)最大,如圖 1-(a)所示。而對(duì)應(yīng)的發(fā)動(dòng)機(jī) Z 向到方盤(pán) X 向曲線可知傳遞函數(shù)存在峰值與響應(yīng)曲線趨勢(shì)保持一致,如圖 1-(C)所示。證明傳遞函數(shù)是占主要貢獻(xiàn),此激勵(lì)點(diǎn)載荷對(duì)響應(yīng)基本沒(méi)有影響。同理對(duì)應(yīng)方向盤(pán) Z 向曲線也是發(fā)動(dòng)機(jī) Z 向這條路徑傳函其主要貢獻(xiàn)。這樣可以通過(guò)改進(jìn)此傳函的峰值來(lái)降低總響應(yīng)的峰值。
3 轉(zhuǎn)向抖動(dòng)改進(jìn)
3.1 轉(zhuǎn)向系統(tǒng)模態(tài)驗(yàn)證
利用調(diào)整有限元模型保證與實(shí)測(cè)結(jié)果一致,經(jīng)過(guò)有限元仿真結(jié)果查找問(wèn)題根源。表 1為臺(tái)架試驗(yàn)?zāi)B(tài)對(duì)比結(jié)果。轉(zhuǎn)向管柱帶方向盤(pán)本體進(jìn)行的臺(tái)架試驗(yàn)。共做 5 種工況較為極限的工況。分別取方向盤(pán)橫擺(X)與方向盤(pán)垂向擺動(dòng)(Y),仿真結(jié)果與試驗(yàn)結(jié)果基本接近, 因此轉(zhuǎn)向系統(tǒng)的有限元模型可以用于問(wèn)題改進(jìn)應(yīng)用。表 1 為安裝狀態(tài)轉(zhuǎn)向的模態(tài)對(duì)比結(jié)果。

3.2 結(jié)構(gòu)優(yōu)化
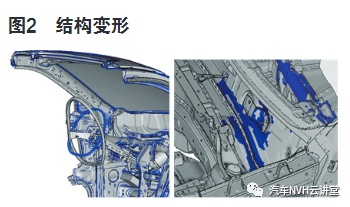
由于電機(jī)的位置布置已定,管柱本體結(jié)構(gòu)基本無(wú)法更改, 僅能通過(guò)更改車身結(jié)構(gòu)或方向盤(pán)本體進(jìn)行優(yōu)化?;谟邢拊P驮诎l(fā)動(dòng)機(jī)懸置安裝點(diǎn)處加載實(shí)際載荷并輸出2196RPM下的整車模型的振型動(dòng)畫(huà),方向盤(pán)本體沿著輪輻擺動(dòng)劇烈。并且玻璃下橫梁處與儀表板橫梁相連的加強(qiáng)件有局部應(yīng)變能集中,并且變形嚴(yán)重。因此可以著重對(duì)方向盤(pán)的輪輻和玻璃下橫梁進(jìn)行加強(qiáng)。
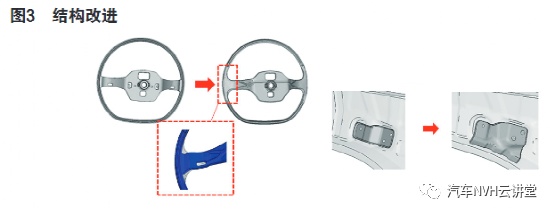
由于本車型選用兩幅方向盤(pán),輪輻與輪緣的接觸面積較小, 支撐能力較弱并且輪輻較薄弱。并且輪輻沒(méi)有任何特征剛度較弱。優(yōu)化方案是在輪輻邊緣與輪緣增加了較大的過(guò)渡,起到支撐兩端的作用。并且在輪輻的背面做了些加強(qiáng)筋。但為了控制重量加強(qiáng)筋和過(guò)渡區(qū)域不能做的過(guò)大。由于車身玻璃下橫梁與儀表板橫梁的連接板接觸面積較小,需要更改較大的支撐,以提高局部剛度。修改方案如圖3 所示。
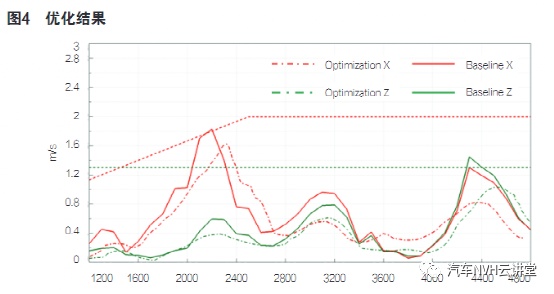
最終經(jīng)過(guò)驗(yàn)證實(shí)際加速激勵(lì)仿真分析,方向盤(pán) X 向和 Z 向峰值有所下降并低于目標(biāo)線。顯然通過(guò)增加以上方案是有效的, 如圖 4優(yōu)化結(jié)果。
4 結(jié)論
針對(duì)本文中的某車型計(jì)算轉(zhuǎn)向系統(tǒng)抖動(dòng)的問(wèn)題發(fā)現(xiàn), 采用 TPA 分析的方法,能夠快速地找出轉(zhuǎn)向抖動(dòng)的具體路徑, 并對(duì)其進(jìn)行優(yōu)化。雖然本文未對(duì)轉(zhuǎn)向進(jìn)行自身進(jìn)行更改,但轉(zhuǎn)向自身模態(tài)也可通過(guò)更改自身結(jié)構(gòu)進(jìn)行優(yōu)化, 但需要在開(kāi)發(fā)前期對(duì)供應(yīng)商進(jìn)行轉(zhuǎn)向?qū)Φ啬B(tài)的要求,并結(jié)合轉(zhuǎn)向的結(jié)構(gòu)特點(diǎn),配合好L 與 D 的尺寸。
作者:李京福 王吉祥 鄂世國(guó)
作者單位:華晨汽車工程研究院CAE工程室 遼寧省沈陽(yáng)市 110141
來(lái)源:時(shí)代汽車
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 65



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國(guó)家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開(kāi)發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國(guó)法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國(guó)法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國(guó)法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
