




 廣告
廣告





















































底盤開發(fā)之CAE -整車虛擬仿真
2021-09-13 21:53:07· 來源:Vehicle 作者:Pirate Jack

基于車輛作為一個(gè)系統(tǒng)的結(jié)構(gòu)表示,以下傳輸方程可用于各種工作范圍和激勵(lì):
傳遞矩陣G(s)包含關(guān)于系統(tǒng)輸入和輸出之間傳遞路徑的信息,因此可用于描述系統(tǒng)在目標(biāo)操作條件下的傳遞行為。傳遞矩陣為分析車輛的操縱和動(dòng)態(tài)行為奠定了基礎(chǔ)。
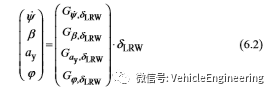
下面幾段著重介紹橫向動(dòng)力學(xué)。橫向動(dòng)力學(xué)研究中最重要的輸出值是橫擺角速度(橫擺角速度)ψ、車輛側(cè)滑角β、橫向加速度av和側(cè)傾角Ψ。系統(tǒng)由方向盤轉(zhuǎn)角輸入δLRW激勵(lì)。因此,用于描述系統(tǒng)行為的簡化傳遞方程變?yōu)椋?/span>
車輛的橫向動(dòng)力學(xué)行為隨車輛的速度和橫向加速度而變化。因此,橫向動(dòng)力行為域被定義為由這兩個(gè)軸組成的圖。在此范圍內(nèi),選擇操作點(diǎn),以便研究整個(gè)線性操作條件范圍(圖6-37)。
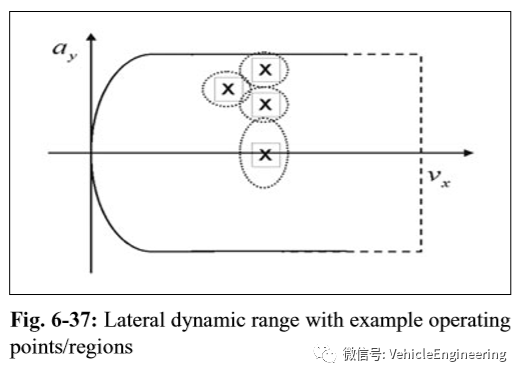
對(duì)于這些操作點(diǎn)中的每一個(gè),可以使用二階線性傳遞函數(shù)來描述四個(gè)輸入和輸出路徑的傳遞行為。這些傳遞函數(shù)表示系統(tǒng)在選定操作點(diǎn)的小信號(hào)行為。為了確定特定工作點(diǎn)的小信號(hào)行為,系統(tǒng)在選定的工作點(diǎn)內(nèi)和周圍受到激勵(lì)。對(duì)激勵(lì)信號(hào)的要求部分取決于工作點(diǎn)的線性極限,以及由此產(chǎn)生的傳輸行為的預(yù)期相關(guān)頻率范圍。
隨機(jī)或正弦輸入信號(hào)最適合用作測(cè)試信號(hào)。這些測(cè)試信號(hào)疊加在選定操作點(diǎn)所需的固定方向盤角度上。正弦掃頻信號(hào)在車輛試驗(yàn)中得到了很好的應(yīng)用。
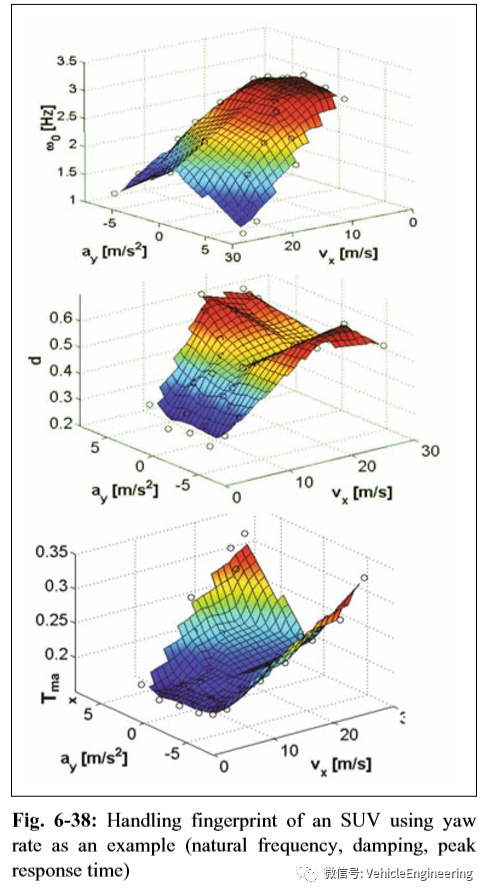
識(shí)別方法用于根據(jù)記錄的頻率響應(yīng)值確定二階傳遞函數(shù)。然后,這些傳遞函數(shù)可用于計(jì)算表征車輛操縱性的各種動(dòng)態(tài)參數(shù)。這些特征值可以在橫向動(dòng)態(tài)范圍內(nèi)繪制,即作為車速和橫向加速度的函數(shù),以獲得車輛的操縱指紋(圖6-38)。
除了車輛操縱性的標(biāo)準(zhǔn)評(píng)估外,本文所述的指紋法為工程師提供了描述和評(píng)估整個(gè)橫向動(dòng)態(tài)特性范圍內(nèi)的操縱性的可能性,包括車輛附著力的物理極限。
指紋法不僅可以用于伴隨客觀和比較的車輛評(píng)估,還可以作為車輛開發(fā)過程中處理行為的連續(xù)描述,從最初的需求規(guī)范開始
最終確認(rèn)。雖然指紋識(shí)別方法是針對(duì)橫向動(dòng)態(tài)領(lǐng)域發(fā)展起來的,但也可以擴(kuò)展到縱向和縱向動(dòng)態(tài)領(lǐng)域。有關(guān)指紋方法的詳細(xì)說明,請(qǐng)參見[21]。
用控制系統(tǒng)方法描述彈性運(yùn)動(dòng)學(xué)
在確定新懸架系統(tǒng)的彈性運(yùn)動(dòng)特性時(shí),采用基于新型模型的控制系統(tǒng)設(shè)計(jì)方法來描述彈性運(yùn)動(dòng)效應(yīng)。該彈性運(yùn)動(dòng)學(xué)模型的基礎(chǔ)是根據(jù)[22]中的轉(zhuǎn)向模型,添加彈性運(yùn)動(dòng)學(xué)和運(yùn)動(dòng)前束差角。
轉(zhuǎn)向模型的輸入值對(duì)應(yīng)于已知車型的不同條件值和輸出值。轉(zhuǎn)向模型的輸出值是車輛模型的輸入值。側(cè)向力引起的彈性運(yùn)動(dòng)前束角差(由轉(zhuǎn)向模型輸出)可以作為側(cè)向力對(duì)車輪切割角影響的反饋函數(shù)集成到車輛模型中(圖6-39)。
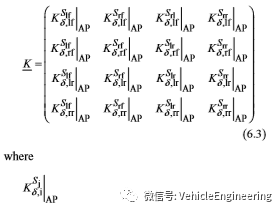
側(cè)向力引起的二次效應(yīng)用以下反饋矩陣表示:
是第i個(gè)車輪前束角變化的量度,用于測(cè)量在所選工作點(diǎn)AP處第j個(gè)車輪上橫向力的變化。反饋矩陣的各個(gè)分量對(duì)應(yīng)于各種前束力-位移曲線Y Y-XXK G=-的負(fù)梯度Y XG。負(fù)號(hào)源于前束差角(作為正值添加到車輪切割角中)的定義,源于輸出反饋(要求輸入負(fù)反饋值)的定義。預(yù)濾波矩陣

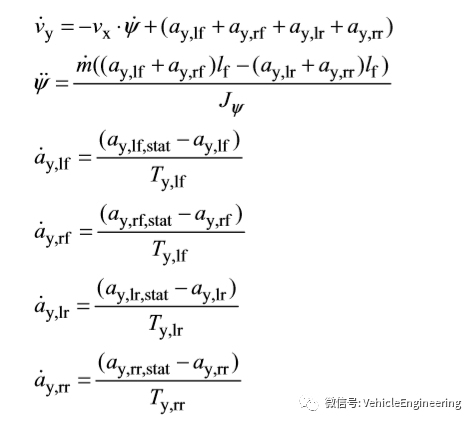
主要考慮轉(zhuǎn)向比iL。作為描述彈性運(yùn)動(dòng)特性的仿真模型,使用包括輪胎磨合行為的線性化車輛模型來描述橫向和偏航運(yùn)動(dòng):
使用極點(diǎn)規(guī)范[23]確定輸出反饋的直接方法用于指定反饋矩陣。這種方法允許在合成軸系時(shí)考慮許多不同的特性。該模型提供的可能性在[21]中描述。
設(shè)計(jì)過程應(yīng)在幾個(gè)不同的操作點(diǎn)進(jìn)行。結(jié)果值是趾力-位移曲線的梯度。通過對(duì)輪胎力進(jìn)行積分,可以將其轉(zhuǎn)化為力-位移曲線。這些力-位移曲線不一定能用被動(dòng)系統(tǒng)來實(shí)現(xiàn)。因此,該設(shè)計(jì)過程非常適合確定主動(dòng)軸系統(tǒng)的要求。實(shí)現(xiàn)所需的力-位移曲線是車軸開發(fā)人員的責(zé)任。
目標(biāo)趾力-位移曲線的形狀是以客觀準(zhǔn)則的形式根據(jù)操縱要求確定的。這些準(zhǔn)則被轉(zhuǎn)化為控制系統(tǒng)準(zhǔn)則,即極點(diǎn)和零點(diǎn)。參考車輛動(dòng)態(tài)特性的“操縱指紋”描述可作為新軸系開發(fā)和優(yōu)化的基礎(chǔ)。新車軸所需操縱性能的極點(diǎn)和零點(diǎn)可直接從參考車軸的傳遞函數(shù)中獲取。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 114



 廣告
廣告 編輯推薦




最新資訊
-
“汽車爬坡試驗(yàn)方法”將有國家標(biāo)準(zhǔn)
2026-03-03 12:44
-
十年耐久監(jiān)管時(shí)代:電池系統(tǒng)開發(fā)策略將如何
2026-03-03 12:44
-
聯(lián)合國法規(guī)R59對(duì)機(jī)動(dòng)車備用消聲系統(tǒng)的工程
2026-03-03 12:08
-
聯(lián)合國法規(guī)R58對(duì)后下部防護(hù)裝置的工程化約
2026-03-03 12:07
-
聯(lián)合國法規(guī)R57對(duì)摩托車前照燈配光性能的工
2026-03-03 12:07
