




 廣告
廣告





















































基于場景識別的電動(dòng)汽車喚醒、休眠策略設(shè)計(jì)
2020-04-14 23:53:10· 來源:電動(dòng)學(xué)堂

作者單位:北京新能源汽車股份有限公司DOI:10.16638/j.cnki.1671-7988.2020.05.0091前言隨著汽車智能化、網(wǎng)聯(lián)化、電動(dòng)化、共享化,車載電控單元數(shù)量不斷增多。電
作者單位:北京新能源汽車股份有限公司
DOI:10.16638/j.cnki.1671-7988.2020.05.009
1前言
隨著汽車智能化、網(wǎng)聯(lián)化、電動(dòng)化、共享化,車載電控單元數(shù)量不斷增多。電控單元應(yīng)按照用戶需求及時(shí)喚醒,以執(zhí)行電控功能;同時(shí),應(yīng)在無功能需求時(shí)盡快進(jìn)入掉電或休眠狀態(tài),以防止蓄電池虧電。當(dāng)前,文獻(xiàn)多圍繞通過設(shè)計(jì)局部網(wǎng)絡(luò),開展喚醒、休眠機(jī)制設(shè)計(jì)的研究,但未考慮設(shè)計(jì)機(jī)制以避免當(dāng)前無關(guān)、未喚醒控制器在下一功能需求出現(xiàn)時(shí)喚醒啟動(dòng)慢、影響用戶體驗(yàn)的問題。此外,現(xiàn)有防虧電研究多聚焦于低壓電源管理策略,而圍繞如何識別無法休眠電控單元、進(jìn)行防虧電主動(dòng)控制的研究也較少。
針對以上問題,本文設(shè)計(jì)了一種基于所識別的應(yīng)用場景同時(shí)考慮用戶意圖預(yù)測的喚醒、休眠的一體化控制機(jī)制,能夠在保證功能響應(yīng)前提下按需進(jìn)行部件差異化喚醒;同時(shí),識別無法休眠部件并進(jìn)行防虧電主動(dòng)控制。
2一體化供電、喚醒及休眠控制系統(tǒng)架構(gòu)
2.1供電、喚醒源的分類及設(shè)計(jì)方法
按照供電電路的結(jié)構(gòu),汽車上典型的低壓供電方式可分為兩類:一類為常電供電,即直接由12V蓄電池正極供電;還有一類為由其它控制器控制繼電器供電,比如ACC繼電器、IG繼電器、充電類控制供電繼電器等。按照喚醒來源,可將喚醒源分為兩類:一類為本功能域外輸入的喚醒,比如動(dòng)力域接收的網(wǎng)聯(lián)模塊發(fā)出的遠(yuǎn)程控制功能喚醒信號;另一類為自身直接接收的傳感器輸入的喚醒信號或本功能域內(nèi)其它控制器輸出的喚醒,比如動(dòng)力域控制器接收到的插槍喚醒信號。本文提出一種場景需求設(shè)計(jì)法,進(jìn)行電控單元供電、喚醒機(jī)制設(shè)計(jì)。首先根據(jù)用戶使用情況進(jìn)行車輛場景劃分,每個(gè)場景下均對應(yīng)一系列電控功能,電控功能又與控制器關(guān)聯(lián),經(jīng)過如此由上至下分析,明確了電控單元需要在哪些用戶場景下工作,最終對應(yīng)得出供電、喚醒機(jī)制可選范圍。
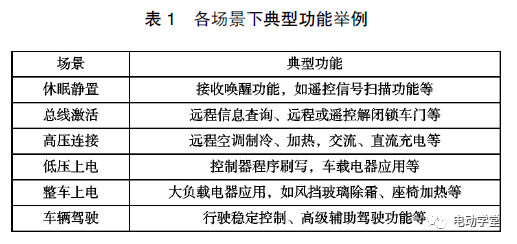
根據(jù)用戶使用場景,將用車場景劃分為靜置休眠、總線激活、高壓上電、低壓上電、整車上電、車輛駕駛共六個(gè)場景,各模式下典型功能如表1所示。在休眠靜置場景下,所有電控單元應(yīng)該處于斷電或休眠狀態(tài)。部分接收車外喚醒的控制器保持喚醒探測狀態(tài),需要連接常電。在總線激活場景下,通常情況下為某接收到車外喚醒的控制器將功能相關(guān)控制器喚醒,以實(shí)現(xiàn)功能運(yùn)轉(zhuǎn),這就要求此類接收車外事件喚醒的控制器具備喚醒輸出能力,比如對外發(fā)送網(wǎng)絡(luò)報(bào)文,或者對外輸出高低電平變化的線路喚醒;與此對應(yīng),與功能相關(guān)的控制器應(yīng)能夠被上述第一個(gè)喚醒控制器喚醒。在高壓上電場景下工作的電控單元,可由動(dòng)力域控制器在進(jìn)行高壓上電引導(dǎo)時(shí)同步喚醒,比如熱管理系統(tǒng)控制單元。僅在低壓上電、整車上電、車輛駕駛場景下有工作需求的控制器,僅需要具備接收IG喚醒,出于節(jié)省IG電連接線束考慮也可具備網(wǎng)絡(luò)喚醒。
當(dāng)電控單元無功能需求時(shí),應(yīng)在供電或喚醒切斷后對應(yīng)進(jìn)入停機(jī)或休眠狀態(tài)。
2.2一體化供電、喚醒及休眠架構(gòu)設(shè)計(jì)
為便于整車喚醒、休眠的統(tǒng)一管理,本文設(shè)計(jì)了具有分層架構(gòu)的一體化供電、喚醒機(jī)制。與分散式喚醒、休眠機(jī)制不同,本架構(gòu)下,各功能域控制器的喚醒、休眠由域控制器全盤管理,包括根據(jù)場景喚醒需要的控制器或引導(dǎo)其休眠,和無法正常休眠控制器的識別與防低壓虧電管理。域控制器即指圖1的動(dòng)力域、車身域、信息娛樂域等的主控制器。

以交流充電功能為例,介紹本文所研究的分層喚醒機(jī)制。在用戶將交流充電槍與車端充電口連接后,充電口控制單元會被充電槍連接這一事件喚醒;接下來,充電口控制單元將整車控制器喚醒,并告知其現(xiàn)在有交流充電槍連接;整車控制器在判定車輛具備充電條件時(shí),將動(dòng)力電池控制器、冷卻控制器等喚醒,以執(zhí)行充電。
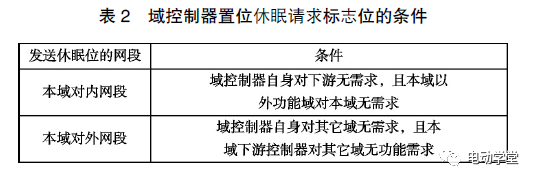
前文中提到,各域控制器根據(jù)當(dāng)前場景判斷及場景預(yù)測,進(jìn)行下游控制器喚醒,當(dāng)本功能域和其它功能域均無相關(guān)功能需求時(shí),域控制器引導(dǎo)下游控制器進(jìn)入休眠。其中,本功能域無功能需求是指域控制器自身無報(bào)文喚醒以外喚醒輸入,域內(nèi)各下游OSEK網(wǎng)絡(luò)管理控制器均置位并發(fā)送休眠請求標(biāo)志位,或不參與OSEK網(wǎng)絡(luò)管理的域內(nèi)控制器停止報(bào)文發(fā)送。
綜上,域控制器發(fā)送休眠請求標(biāo)志位的前提條件如表2所列。
3預(yù)測喚醒與異常防虧電控制
考慮到電控單元由休眠狀態(tài)到喚醒后的可正常工作狀態(tài),大概需要150ms左右的時(shí)長,若喚醒回路中有不止一個(gè)控制器,則整體喚醒時(shí)間將翻倍或更長,最終可能影響用戶需求的響應(yīng)速度。因此,有必要進(jìn)行場景預(yù)測并提前喚醒即將可能用到的控制器,以準(zhǔn)備好響應(yīng)用戶需求。本文主要研究用戶解鎖交流充電槍操作下的預(yù)測喚醒控制。為防止較大電流充電過程中,充電槍被帶載拔出造成設(shè)備損毀,規(guī)定充電功率在6.6kw時(shí)需要配置充電槍鎖止裝置。此外,在充電結(jié)束后,出于防盜考慮,車端充電口控制單元保持充電槍鎖處于閉鎖狀態(tài),當(dāng)用戶下一次用車時(shí),按動(dòng)遙控鑰匙解鎖車門后,再連續(xù)按動(dòng)遙控鑰匙解鎖鍵兩次即打開充電槍鎖,以便于用戶在車外即拔下充電槍,結(jié)束充電。在這一場景下的預(yù)測喚醒控制策略,可表示為流程圖2。

域控制器能夠根據(jù)場景建立喚醒白名單,此白名單用于休眠異??刂破鞯淖R別。域控制器根據(jù)接收到的報(bào)文情況,對于活躍報(bào)文屬于白名單外電控單元的,標(biāo)記為無法正常休眠,此后域控制器清除對域外網(wǎng)段的功能需求,以使本域內(nèi)的休眠故障控制器不影響其它網(wǎng)段正常休眠。
4工況仿真與策略驗(yàn)證
4.1仿真環(huán)境介紹
本文應(yīng)用CANOE進(jìn)行了總線仿真,所搭建的網(wǎng)絡(luò)分為三個(gè)網(wǎng)段,分別為車身域網(wǎng)段、動(dòng)力域網(wǎng)段、動(dòng)力域內(nèi)部網(wǎng)段。所搭建網(wǎng)絡(luò)模型中的4個(gè)控制器均具備OSEK網(wǎng)絡(luò)管理機(jī)制,且均連接常電。GW為網(wǎng)關(guān)控制器,負(fù)責(zé)根據(jù)域控制器跨網(wǎng)段路由需求進(jìn)行信號跨網(wǎng)段路由;PDCU、BDCU分別為動(dòng)力域控制器、車身域控制器,負(fù)責(zé)根據(jù)本域內(nèi)及整車其它功能域的功能需求,進(jìn)行下游控制器喚醒、休眠引導(dǎo)控制;CCU為充電口控制單元,負(fù)責(zé)根據(jù)PDCU命令進(jìn)行電磁鎖閉鎖、解鎖,負(fù)責(zé)接收充電設(shè)備信號并首先被喚醒。
4.2充電后用戶遠(yuǎn)程解鎖場景仿真
4.2.1未采用預(yù)測喚醒控制策略時(shí)解充電槍鎖

仿真結(jié)果圖3所示,首先,遙控鑰匙解鎖信號將BDCU喚醒,BDCU開始在車身域網(wǎng)段發(fā)送報(bào)文,GW隨后被喚醒并在車身域網(wǎng)段發(fā)送報(bào)文。可見,由于未采用預(yù)測喚醒策略,用戶第一次按下解鎖車門按鍵,BDCU僅根據(jù)當(dāng)前功能需求未將動(dòng)力域喚醒。隨后3.2s時(shí)BDCU接收到用戶連續(xù)兩次按下遙控鑰匙解鎖鍵后,才開始要求GW喚醒動(dòng)力域,并向PDCU發(fā)送解鎖信號,后者再將CCU喚醒,在3.7s時(shí)解鎖充電槍的電磁鎖。從用戶在開始發(fā)出解充電槍鎖信息,到CCU將充電槍鎖解開,中間需要依次喚醒PDCU及CCU,大概耗時(shí)500ms。
根據(jù)用戶調(diào)查,發(fā)現(xiàn)部分用戶在連續(xù)兩次按下遙控鑰匙解鎖鍵后,會同步進(jìn)行拔槍操作,若有上述500ms響應(yīng)延時(shí),會導(dǎo)致第一次拔槍失敗。
4.2.2采用預(yù)測喚醒控制策略時(shí)解充電槍鎖
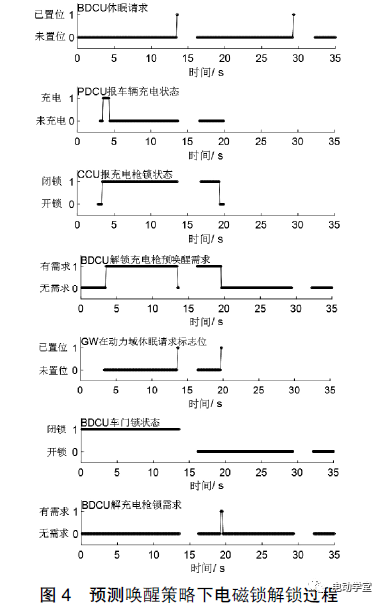
當(dāng)采用預(yù)測喚醒控制策略時(shí),仿真結(jié)果如圖4所示。根據(jù)結(jié)果發(fā)現(xiàn),在車輛進(jìn)入充電前,3.3s時(shí)電磁鎖已經(jīng)閉鎖,CCU經(jīng)過PDCU、GW的信號傳遞,向BDCU發(fā)送了電磁鎖閉鎖狀態(tài),后者開始置位預(yù)測喚醒需求位。充電結(jié)束后,整車進(jìn)入休眠狀態(tài),用戶第一次按下遙控解鎖按鍵,16.2s時(shí)BDCU醒來即開始向GW提出喚醒動(dòng)力域的需求,并通知PDCU有預(yù)測充電槍解鎖需求,后者將CCU喚醒。至此,BDCU、PDCU、CCU均進(jìn)入喚醒狀態(tài),準(zhǔn)備好執(zhí)行用戶的解充電槍鎖命令。19.3s時(shí)BDCU收到上述命令傳遞到CCU后,充電槍鎖隨后打開,間隔100ms。用戶拔下充電槍,由于無功能需求,車輛進(jìn)入休眠。32.2s時(shí),當(dāng)用戶再次按下遙控鑰匙解鎖車門按鍵,車上僅BDCU被喚醒,PDCU、CCU均未喚醒。
結(jié)果表明,在采用了預(yù)測喚醒策略后,BDCU能夠根據(jù)充電槍電磁鎖閉鎖狀態(tài),置位充電槍解鎖預(yù)測喚醒需求位,并在下一次被遙控解車門鎖信號喚醒時(shí),要求將PDCU、CCU喚醒,便于收到進(jìn)一步命令后將充電槍迅速解開。
4.3整車下電后CMU無法休眠場景及防虧電控制

本節(jié)進(jìn)行異常休眠故障仿真。在充電槍未連接的前提下,CCU持續(xù)發(fā)送休眠請求指示位為0,導(dǎo)致動(dòng)力域內(nèi)網(wǎng)段無法休眠,且PDCU無法向GW發(fā)送休眠請求;1.1s時(shí),PDCU根據(jù)收到的報(bào)文發(fā)現(xiàn),車輛未插槍條件下,CCU仍無法休眠,從而識別出CCU有異常休眠情況,PDCU標(biāo)記“休眠異常標(biāo)志位”;此后,PDCU在動(dòng)力域?qū)ν饩W(wǎng)段發(fā)送休眠請求指示位,在BDCU滿足延時(shí)10s休眠條件后,GW引導(dǎo)整車除動(dòng)力域內(nèi)部網(wǎng)段外,進(jìn)入休眠狀態(tài),最終使休眠異常僅影響動(dòng)力域?qū)?nèi)網(wǎng)段。
5結(jié)論
本文研究了基于應(yīng)用場景識別的電動(dòng)汽車喚醒、休眠一體化控制策略,結(jié)論如下:
(1)分層的一體化喚醒、休眠控制架構(gòu),統(tǒng)一解析車輛的功能需求,基于應(yīng)用場景需求進(jìn)行相關(guān)電控單元喚醒控制,從而最小化喚醒電控單元數(shù)量,并進(jìn)行異常休眠處理;
(2)基于應(yīng)用場景預(yù)測,域控制器可以進(jìn)行下游控制器的預(yù)測喚醒控制,本文探討了遙控解鎖場景下,采用預(yù)測喚醒策略能夠保證充電槍解鎖更迅速;
(3)基于應(yīng)用場景,識別出無法正常休眠的電控單元,進(jìn)行防虧電控制,以降低部件休眠異常帶來的12V蓄電池虧電的風(fēng)險(xiǎn)。



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價(jià)開始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
