




 廣告
廣告





















































自動駕駛之激光雷達
2020-05-14 00:19:13· 來源:汽車學堂Automooc

激光雷達因分辨率高、抗干擾能力強、體積小質量輕的優(yōu)點,廣泛應用在距離測量和定位,三維激光雷達憑借動態(tài)三維建模功能廣泛應用在機器人環(huán)境識別、自動駕駛、高
激光雷達因分辨率高、抗干擾能力強、體積小質量輕的優(yōu)點,廣泛應用在距離測量和定位,三維激光雷達憑借動態(tài)三維建模功能廣泛應用在機器人環(huán)境識別、自動駕駛、高精度地圖測繪等領域。
1.在無人駕駛中的應用
L3以下階段,毫米波雷達甚至攝像頭都能夠滿足汽車的視覺需求。但要想發(fā)展到高級別自動駕駛階段,受測距、分辨率、精度、信息全面性的影響,激光雷達不可替代。
激光雷達(LiDAR),是一種用于精確獲得三維位置信息的傳感器。它通過測量激光信號的時間差、相位差確定距離,通過水平旋轉掃描或者相控掃描測量角度,再通過不同俯仰角度信號獲得高度信息,從而獲取整體的三維信息。相比傳統(tǒng)的3D信號傳感器,激光雷達的探測距離更遠,測量精度更高,響應速度也更快。
2.工作原理
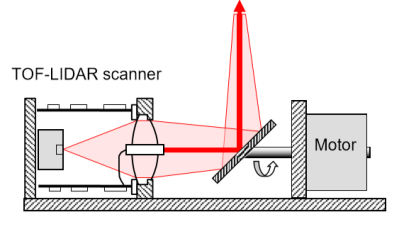
Lidar基本結構
包括發(fā)射器、反射鏡、電機、聚焦透鏡和接收器。粗紅線為發(fā)射光路,淺紅色區(qū)域為接收光路。電機通過旋轉使得發(fā)射、接受光束照射到不同的位置,從而形成 360° 掃描。
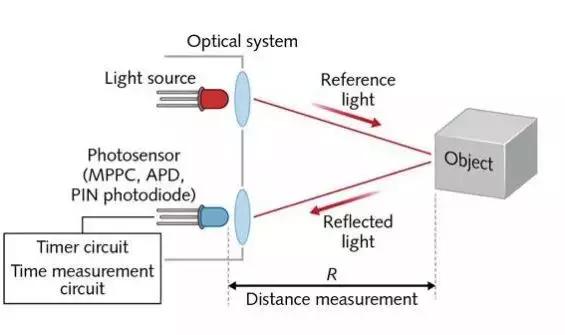
激光雷達最基本的掃描原理是飛行時間測量法——激光雷達中的激光器首先發(fā)射出一束激光脈沖,在投射到目標物體上后發(fā)生漫反射,之后傳感器再接收漫反射激光。激光雷達通過激光光束在空中的飛行時間來計算得出目標物體到傳感器間的距離。
激光雷達是一種采用非接觸激光測距技術的掃描式傳感器,其工作原理與一般的雷達系統(tǒng)類似,通過發(fā)射激光光束來探測目標,并通過搜集反射回來的光束來形成點云和獲取數(shù)據(jù),這些數(shù)據(jù)經(jīng)光電處理后可生成為精確的三維立體圖像。
采用這項技術,可以準確的獲取高精度的物理空間環(huán)境信息,測距精度可達厘米級,這使得激光雷達成為汽車自動駕駛、無人駕駛、定位導航、空間測繪、安保安防等領域最為核心的傳感器設備。
3.分類
不同的分類方法:
機械式激光雷達、固態(tài)激光雷達
1機械式激光雷達
通過機械式旋轉來實現(xiàn)激光掃描;多束激光豎列而排,縱向疊加后呈現(xiàn)出三維立體圖形。
2固態(tài)激光雷達
固態(tài)激光雷達,其技術路線主要分MEMS、光學相控陣技術(OPA)或FLASH三種。
相比于傳統(tǒng)的機械式激光雷達,固態(tài)激光雷達主要具備的技術優(yōu)勢有——分辨率高、裝調效率高、測距遠以及成本低。分辨率高主要是因為固態(tài)激光雷達采用了連續(xù)掃描的方式,固態(tài)激光雷達的垂直和水平角分辨率在低幀率下可以達到0.03°。
OPA(optical phased array)光學相控陣技術
采用多個光源組成陣列,通過控制各光源發(fā)光時間差,就可以合成能夠靈活控制角度方向的主光束。然后再加以控制,主光束便可以實現(xiàn)對不同方向的掃描。相比于MEMS激光雷達,OPA激光雷達完全取消了機械結構,結構上更加簡單,體積更小,但難點在于如何把單位時間內(nèi)測量的點云數(shù)據(jù)提高以及投入成本巨大等問題。
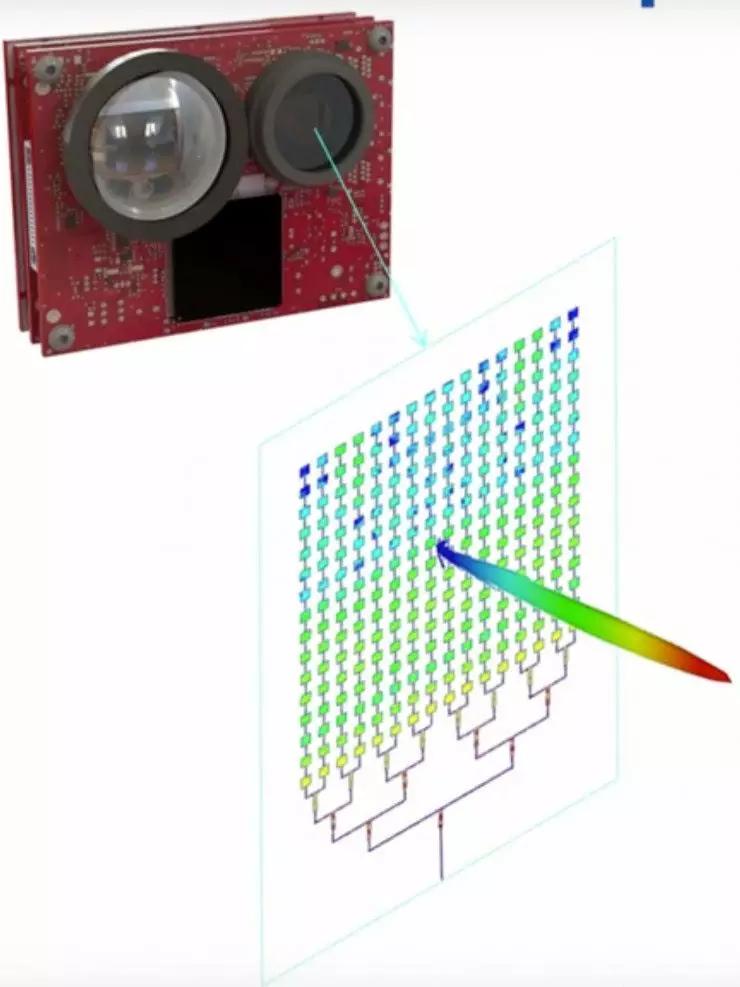
OPA激光雷達技術原理圖
MEMS(Micro-Electro-MechanicalSystem)激光雷達
實際上是將機械機構微型化、電子化,通過微電子工藝在硅芯片上集成MEMS微振鏡以替代傳統(tǒng)的機械式選準裝置,并進行大規(guī)模量產(chǎn)。主要是通過MEMS微鏡來實現(xiàn)垂直方面的一維掃描,整機360度水平旋轉來完成水平掃描,而其光源是采用光纖激光器。
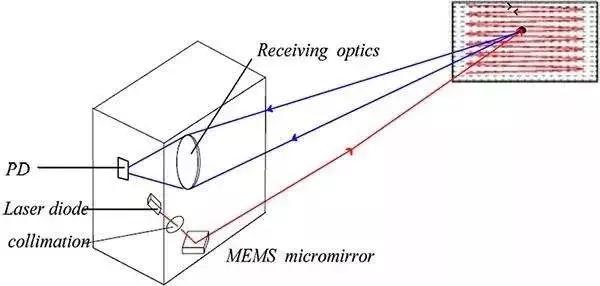
MEMS固態(tài)激光雷達原理示意
Flash固態(tài)激光雷達
原理是快閃,在短時間發(fā)射出一大片覆蓋探測區(qū)域的激光(即面陣光),再以高度靈敏的接收器,來完成對環(huán)境周圍圖像的繪制。雖然穩(wěn)定性和成本不錯,但問題在于探測距離較小,在技術的可靠性方面仍有待突破。
Flash(閃光)激光雷達基本原理
單線束激光雷達、多線束激光雷達
單線束激光雷達一次掃描只產(chǎn)生一條掃描線, 其所獲得的數(shù)據(jù)為2D數(shù)據(jù)。數(shù)據(jù)處理量較小且速度快,單線束激光雷達多被應用于安全防護、地形測繪等領域。
在自動駕駛汽車上應用多線束激光雷達是為了實現(xiàn)360°掃描,多線束激光雷達一次掃描可產(chǎn)生多條掃描線,目前市場上多線束產(chǎn)品包括4線束、8線束、16線束、32線束、64線束等。

905nm、1559nm
目前應用于自動駕駛領域的激光雷達選用的激光器大多圍繞905nm和1559nm兩種類型。
相比于價格高昂的1559nm激光器,905nm激光器成本低、產(chǎn)業(yè)鏈成熟,能夠順應固態(tài)激光雷達大規(guī)模量產(chǎn)的趨勢。
但毫無疑問,1550nm的人類視覺安全度更高,可以使用單脈沖更大輻射能量的激光,這就意味著探測距離會更遠。目前來看,國內(nèi)外產(chǎn)品主要還是以905nm激光器為主。
4.激光雷達物體檢測算法
激光雷達具有不受光照影響和直接獲得準確三維信息的特點,因此常被用于彌補攝像頭傳感器的不足。激光雷達采集到的三維數(shù)據(jù)通常被稱為點云。

一個32線激光雷達的一幀數(shù)據(jù)的三維可視化圖
在深度學習流行之前主要用傳統(tǒng)的機器學習方法對點云進行分類和檢測。
在這個領域對于這些學習方法本身的研究并不多,研究者更傾向于直接把理論上較為成熟的方法應用到激光點云數(shù)據(jù)中。研究者將研究重點主要放在對數(shù)據(jù)本身特性的理解上,從而設計出適合點云的算法流程。
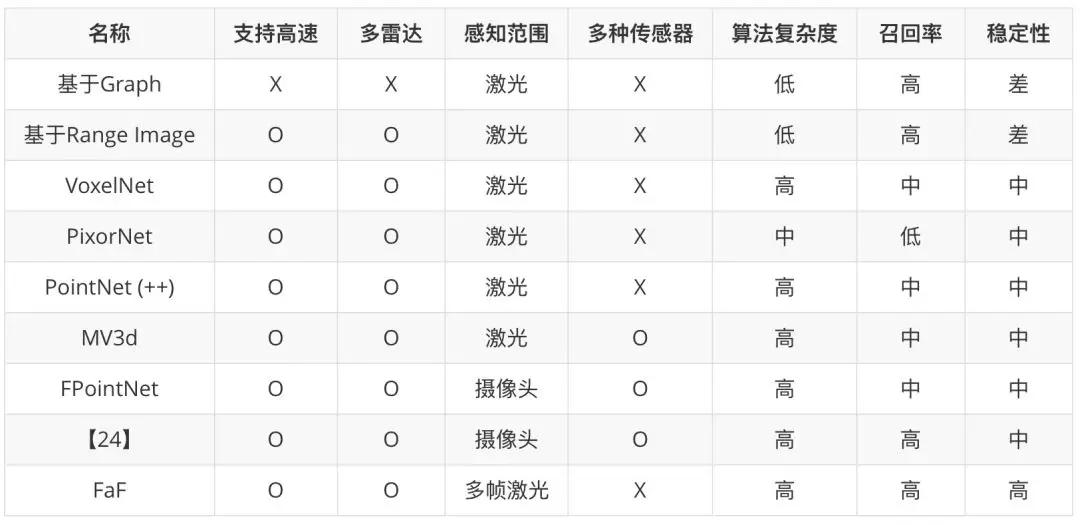
相關的目標檢測的數(shù)據(jù)結構和算法?;诩す饫走_數(shù)據(jù)的目標檢測不是一個很新的領域,但是隨著在深度學習的廣泛運用以及自動駕駛的興起,這個領域在這幾年不斷出現(xiàn)更好的方法。下表是對分類檢測方法的簡單的總結。表中感知范圍一欄表示約束算法檢測范圍的最主要的傳感器。
5.產(chǎn)業(yè)
全球激光雷達主流廠商

激光雷達產(chǎn)業(yè)構成
激光雷達系統(tǒng)復雜,涉及的核心元器件眾多:光電探測器、激光器、準直鏡頭、掃描鏡、數(shù)模轉換器等等。核心元器件目前主要是國外廠商壟斷,國內(nèi)很少有企業(yè)有能力自主量產(chǎn)。

- 下一篇:自動調節(jié)亮度的汽車車內(nèi)頂燈設計
- 上一篇:自動駕駛之毫米波雷達



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價開始從“電池單體性能指標”轉
2026-03-04 11:38
