




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
某越野汽車(chē)磁流變半主動(dòng)懸架變論域模糊控制?
2020-11-04 23:22:39· 來(lái)源:ATC汽車(chē)底盤(pán) 作者:龐 輝等

摘要為了解決半主動(dòng)懸架傳統(tǒng)變論域模糊控制器過(guò)度依賴經(jīng)驗(yàn)規(guī)則的問(wèn)題,提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)的變論域 T-S模糊控制策略。首先,根據(jù)磁流變減振器阻尼特
摘要 為了解決半主動(dòng)懸架傳統(tǒng)變論域模糊控制器過(guò)度依賴經(jīng)驗(yàn)規(guī)則的問(wèn)題,提出了一種基于模糊神經(jīng)網(wǎng)絡(luò)的變論域 T-S模糊控制策略。首先,根據(jù)磁流變減振器阻尼特性的實(shí)驗(yàn)結(jié)果,建立基于自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)的減振器 阻尼力模型及1/2車(chē)輛半主動(dòng)懸架動(dòng)力學(xué)模型;其次,建立懸架系統(tǒng) T-S模糊控制器,同時(shí)為了實(shí)時(shí)調(diào)節(jié) T-S模糊 控制器變量的論域,采用模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)描述伸縮因子的變化。
仿 真 結(jié) 果 表 明,筆者提出的變論域模糊控制策 略能夠有效提高車(chē)輛行駛平順性和操作穩(wěn)定性。
關(guān)鍵詞 半主動(dòng)懸架;磁流變減振器;變論域;T-S模糊控制;模糊神經(jīng)網(wǎng)絡(luò)
1.基于實(shí)驗(yàn)數(shù)據(jù)的MR減振器阻尼特性建模
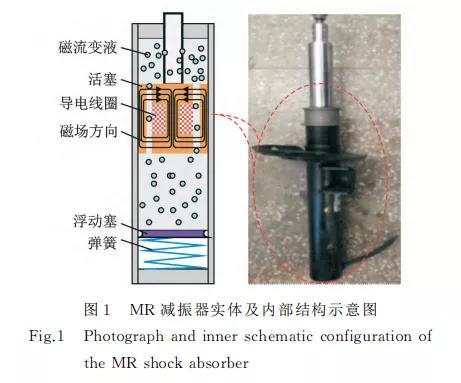
文 中選 取 路 虎 極 光2016款 SUV 車(chē) 所搭 載 的 MagneRide減振器作為研究對(duì)象,其內(nèi)部簡(jiǎn)化結(jié)構(gòu) 如圖1左圖 所 示,圖1右 圖 為 筆 者 所 采 用 的 Mag- neRide減振器實(shí)體。內(nèi)部結(jié)構(gòu)主要包括磁流變液、 活塞、導(dǎo)電線圈、浮動(dòng)塞以及彈簧。通過(guò)調(diào)整導(dǎo)電線 圈電流大小改變磁流變液中磁性分子排列方式,進(jìn) 而實(shí)現(xiàn)減振器阻尼力連續(xù)可調(diào)。
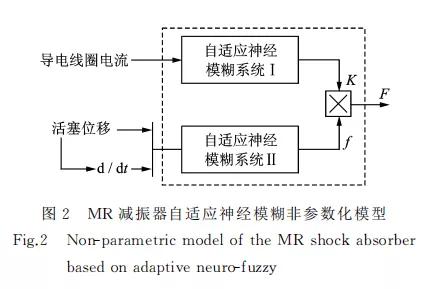
為了精確描述 MR減振器的非線性磁滯特性,學(xué) 者們研究了多種力學(xué)模型。其中自適應(yīng)神經(jīng)網(wǎng)絡(luò)模 糊非參數(shù)化模型在避免大量參數(shù)識(shí)別的同時(shí),能夠較 為精確描述 MR減振器阻尼特性[23]。其結(jié)構(gòu)如圖2 所示,其中,系 統(tǒng)Ⅰ確 定 不 同 電 壓 下 阻 尼 力 輸 出 等 級(jí) K;系統(tǒng)Ⅱ描述特定電壓下阻尼力與活塞位移和速度 之間的非線性關(guān)系,F=K×f 為減振器輸出阻尼力。
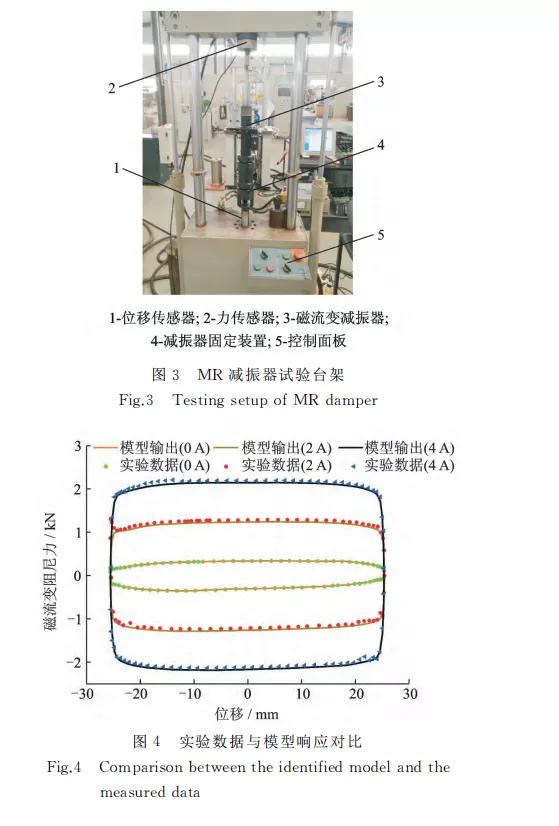
采用如圖3所示的最大輸出力為20kN 的電液 伺服疲勞試驗(yàn)機(jī)對(duì)筆者所采用的 MagneRide減 振 器進(jìn)行實(shí)驗(yàn)測(cè)試,通過(guò)分析實(shí)驗(yàn)數(shù)據(jù)并基于 Matlab \Anfis工具箱對(duì)實(shí)驗(yàn)數(shù)據(jù)訓(xùn)練建立如圖3所 示 的 MR減振器自適應(yīng)神經(jīng)模糊模型。
圖 4 為 頻 率 2Hz、振幅25 mm 時(shí) MR減振器輸出阻尼力 與活塞位移關(guān)系曲線以及對(duì)應(yīng)模型仿真結(jié)果。
2.半主動(dòng)懸架系統(tǒng)動(dòng)力學(xué)模型
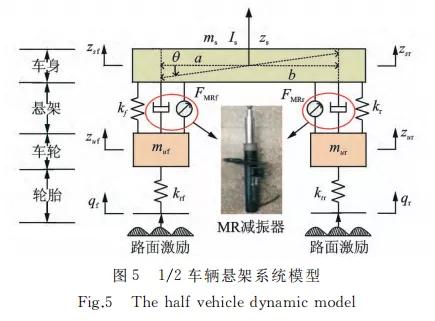
1/2車(chē)輛懸架模型包含了車(chē)輛動(dòng)力學(xué)分析的主 要特征,且結(jié)構(gòu)簡(jiǎn)單,所以在懸架控制策略的研究中 被廣泛應(yīng)用。圖5為4自由度1/2車(chē)輛懸架系統(tǒng)模 型,其中:Is 為轉(zhuǎn)動(dòng)慣量;a,b 為前后軸到質(zhì)心的距 離;θ為車(chē)身俯 仰 角;ms 為折算到半車(chē)模型上的簧 載質(zhì)量;muf,mur?yàn)榉腔奢d質(zhì)量;ktf,ktr?yàn)檩喬偠?系數(shù);zs,zuf,zur,qf,qr 分別為簧載質(zhì)量、非簧載質(zhì) 量和路面的 絕 對(duì) 位 移;kf,kr 為 懸 架的 剛 度。模 型 中用線性彈簧代替彈性輪胎,忽略輪胎阻尼;減振器 固有阻尼及可變阻尼力代替磁流變減振器,因此前 后磁流變減振器阻尼力可表示為

其中:Δyf,Δyr 為前后輪懸架速度;uf,ur 為磁流變 減振器可變阻尼力;cf,cr 為減振器固有阻尼。
如圖5所示的1/2車(chē)輛振動(dòng)模型中,要求車(chē)輛 相對(duì)于縱垂面完全對(duì)稱,而且左右車(chē)輪下的路面不 平度完全一樣,即認(rèn)為車(chē)輛是在縱垂面上的振動(dòng),對(duì) 其受力分析如下。對(duì)于前后軸上方的垂直位移有如下關(guān)系

則懸架系統(tǒng)動(dòng)力學(xué)方程為
3 變論域模糊控制系統(tǒng)設(shè)計(jì)
3.1 變論域模糊控制基本思想
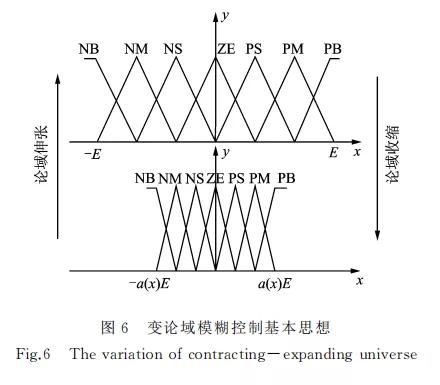
變論域模糊控制的思想可以描述為:假定 Xi= [-Ei,Ei](I =1,2,…,n)代 表 輸入 變 量xi(i= 1,2,…,n)的模糊論域,Y=[-U,U]代表輸出變 量y 的模糊論域。同時(shí){Ail}分別表示模糊語(yǔ)言變 量 Xi,Y 的模糊集合[24]。具體描述如下。1)在 規(guī) 則 不 變 的 前 提 下,論域隨初始論域 [-E,E]通過(guò) 伸縮 因 子α(x)變 換 為 [-a(x)E, a(x)E],如圖6所 示,a(x)為 誤 差變 量 x 的 連 續(xù) 函數(shù)。2)變論域的思想意味著變量 Xi,Y 的 模 糊論 域隨著 輸 入 輸 出 變 量xi,y 而 變 化,具體 表 達(dá) 形 式 如式(4),(5)所示。Xi(xi)=[-αi(xi)Ei,αi(xi)Ei] (4) Y(y)=[-β(y)U,β(y)U] (5) 其中:變量αi(xi)(i=1,2,…,n),β(y)分 別 表示 Xi,Y 的伸縮因子。另外,Xi,Y 的初始論域定義為原始論域,且采 用7個(gè)語(yǔ) 言 模 糊 子 集{NB(負(fù) 大),NM(負(fù) 中),NS (負(fù)?。?,ZE(零),PS(正 ?。校?(正 中),PB(正 大)}。輸入輸出模糊論域伸縮變化如圖6所示。
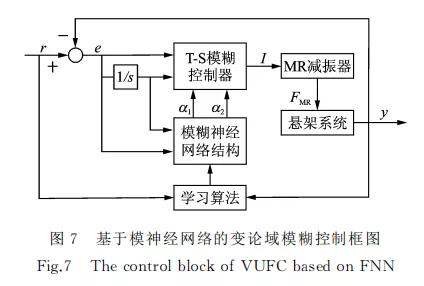
文獻(xiàn)[25]采 用 模糊 推 理 來(lái) 描 述 伸 縮 因 子 的 變 化,其仿真結(jié)果表明,基于模糊推理的變論域模糊控 制(variable-universefuzzycontrolbasedonfuzzy reasoning,簡(jiǎn)稱 VUFC-FR)算法能夠有效地提高收 斂速度和控制精度,但是這種控制算法伸縮因子的 模糊論域劃分不夠精確,從而導(dǎo)致控制結(jié)果存在誤差。針對(duì)這一不足,筆者采用模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)來(lái) 控制伸縮因子的變化,結(jié)合模糊推理的語(yǔ)言邏輯性 和神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)調(diào)整優(yōu)勢(shì),通過(guò)系統(tǒng)誤差分析 以及神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)調(diào)整修正伸縮因子的模糊論 域劃 分?;谀:窠?jīng)網(wǎng)絡(luò)的變論域模糊控制 (variable-universefuzzy control based on fuzzy neuralnetwork,簡(jiǎn) 稱 VUFC-FNN)框 圖 如 圖 7 所 示,r 和y 分別代表理想的輸入和控制信號(hào),I 表示 控制電流,FMR為減振器輸出阻尼力,e 為系統(tǒng)控制 誤差,并表示為e=r-y。
3.2 基于T-S模糊模型的變論域控制器設(shè)計(jì)
T-S型模糊控制器可由如下方程組成:
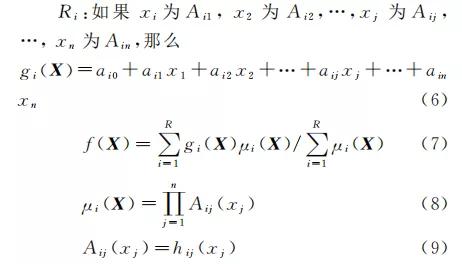
其中:Ri(i=1,2,…,R)為 第i 條 規(guī)則;X =[x1, x2,…,xj,…,xn ]T 為模糊 控制器的輸入矢量;xj(j=1,2,…,R)為第j 個(gè) 輸 入 變 量;Aij為 模 糊 集合;gi(X)為 第i 條 規(guī)則 的 輸 出;f(X)為 模糊 控 制器的輸出,采用中心平均解模糊方法;μi(X)為第 i條規(guī)則的定義為乘積形式的滿足程度;
Aij(xj)為 xj 對(duì)Aij的滿足程度;hij(xj)為定義在輸入論域上 的隸屬度函數(shù)[26]。文中選取車(chē)身加速度¨zs、簧載質(zhì)量與非簧載質(zhì) 量的相對(duì)速度vr 作為控制器的輸入,控制器的輸出 為半主動(dòng)懸架磁流變減振器的控制電流I。對(duì)輸入 變量,論 域 為 {-1,1},采 用 7 個(gè)語(yǔ)言模糊子集 {NB,NM,NS,ZE,PS,PM,PB},采用高斯型隸屬度函數(shù)。
T-S模糊控制器在設(shè)計(jì)過(guò)程中有兩個(gè)關(guān)鍵性問(wèn) 題:a.確 定 控 制 規(guī) 則 數(shù) 目;b.確定規(guī)則后件的系數(shù)。確定規(guī)則數(shù)目的過(guò)程,即對(duì)輸入變量劃分的過(guò)程,它 需要產(chǎn)生合理的子空間。確定控制規(guī)則后件系數(shù)也 就是確定區(qū)域作用量的過(guò)程。
解決這兩個(gè)關(guān)鍵問(wèn)題 步驟如下。1)最優(yōu)參 數(shù)。行駛平順性和操縱穩(wěn)定性是汽 車(chē)動(dòng)力學(xué)研究的兩個(gè)重要領(lǐng)域,懸架系統(tǒng)在協(xié)調(diào)這 兩大使用性能方面起著非常重要的作用。在分析懸 架諸多影響因子中,選取3個(gè)基本參數(shù)對(duì)懸架性能 作評(píng)價(jià),分別為車(chē)身加速度、懸架動(dòng)撓度和輪胎動(dòng)載 荷。為了同時(shí)滿足車(chē)輛行駛平順性和操縱穩(wěn)定性的 要求,建立如式(10)所示的目標(biāo)函數(shù)J。
2)仿真過(guò)程中,以目標(biāo)函數(shù)J 作為評(píng)價(jià)函數(shù), 仿真時(shí)間3s,步長(zhǎng)0.01,獲取一組以車(chē)身加速度¨zs 和懸架相對(duì)速度vr 為輸入,理想控制電流I 為輸出 數(shù)據(jù)。將數(shù)據(jù)導(dǎo)入 Matlab工具箱中,用自適應(yīng)神經(jīng) 模糊推理系統(tǒng)對(duì)數(shù)據(jù)進(jìn)行訓(xùn)練,得到所需的基于 T- S模糊模型的磁流變半主動(dòng)懸架控制系統(tǒng)。
3.3 模糊神經(jīng)網(wǎng)絡(luò)伸縮因子設(shè)計(jì)
決定論域伸縮因子大小的模糊神經(jīng)網(wǎng)絡(luò)采用二 輸入二輸出的5層前向神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),網(wǎng)絡(luò)的輸入 節(jié)點(diǎn)為車(chē)身加速度¨zs 以及簧載與非簧載質(zhì)量的相 對(duì)速度vr,輸出節(jié)點(diǎn)為系統(tǒng)模糊控制器輸入變量的 伸縮因 子α1,α2。模糊子空間均分為7個(gè) 子集,即 {PB,PM,PS,ZE,NS,NM,NB}。伸 縮因 子 模 糊神經(jīng)網(wǎng)絡(luò) FNN 的結(jié)構(gòu)如圖8所示。
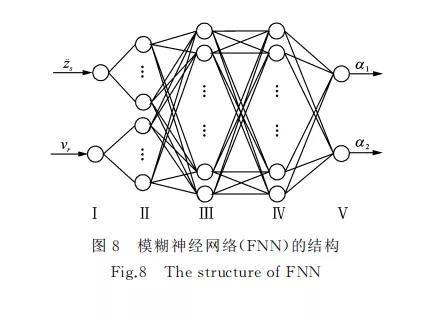
網(wǎng)格的Ⅰ,Ⅱ?qū)訉?duì)應(yīng)于模糊規(guī)則“if”前提,采用 高斯型函數(shù)作為隸屬函數(shù)。
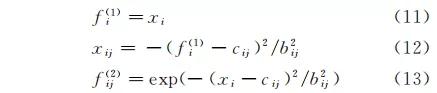
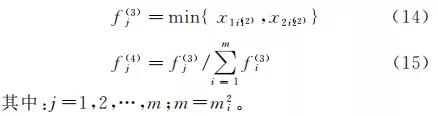
其中:f(1) i 代表Ⅰ層第i 個(gè)節(jié)點(diǎn)的輸出 變 量;f(2) ij 表 示Ⅱ?qū)?第i 個(gè) 輸入 變 量 對(duì) 第j 個(gè) 模糊 子 集 的 激 活 度;i=1,2;x1 =¨zs,x2 =vr;j=1,2,…,mi;cij和 bij分別為第i個(gè)輸入變量第j 個(gè)模糊集合的隸屬度 函數(shù)的中心值和寬度。網(wǎng)格的Ⅲ,Ⅳ層采用 Mamdani推理法實(shí)現(xiàn)模糊 推理。在該推 理 運(yùn) 算 中,f(3) j 為 節(jié)點(diǎn)j 所 有輸 入 信 號(hào)的最小值,歸一化運(yùn)算結(jié)果用f(4) j 表 示。具體 計(jì) 算式如式(14),(15)所示。
網(wǎng)格的Ⅴ對(duì)應(yīng)解模糊層,采用面積重心法實(shí)現(xiàn) 解模糊化。該 層 的 輸 出 節(jié) 點(diǎn)f (5)為調(diào)節(jié)系統(tǒng)模糊 論域的伸縮因子α1,α2,即

其中:ωij為f(5) i 的第j個(gè)語(yǔ)言變量值隸屬函數(shù)的中 心值;i=1,2;f1(5)=α1;f2(5)=α2。在實(shí)現(xiàn)伸縮因子調(diào)整的模糊神經(jīng)網(wǎng)絡(luò) FNN 結(jié) 構(gòu)中,輸入分量的模糊劃分個(gè)數(shù) mi 是預(yù)先確定的, 則需要學(xué)習(xí)的參數(shù)包括最后一層的連接權(quán)ωij(該層 對(duì)應(yīng)于伸縮因子模糊控制器的輸出論域的中心值, i=1,2;j=1,2,…,m)和Ⅱ?qū)与`屬度函數(shù)的中心值 cij和寬度bij(i=1,2;j=1,2,…,mi)[27]。
上述伸縮因子模糊神經(jīng)網(wǎng)絡(luò)是一種多層前饋網(wǎng) 絡(luò),因此可以采用誤差反轉(zhuǎn)的方法設(shè)計(jì)調(diào)整參數(shù)的 學(xué)習(xí)算法,從而使系統(tǒng)的實(shí)際輸出逼近期望輸出。設(shè)yr 和y 分別表示期望輸出和實(shí)際輸出,定義誤差 能量函數(shù)E=1/2(yr -y)2,則模糊神經(jīng)網(wǎng)絡(luò)的調(diào) 整參數(shù)的自學(xué)習(xí)算法如式(17)所示。
其中:η>0為模糊神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)速率。為了驗(yàn)證筆者提出的基于模糊神經(jīng)網(wǎng)絡(luò)的變論域模糊控制算法的有效性和穩(wěn)定性,使 用 Matlab/Simulink工具箱建立該控制算法的仿真 模型,在隨機(jī)不平路面激勵(lì)下,選 擇 車(chē) 身 加 速 度、 俯 仰 角 加 速 度、懸架動(dòng)行程及輪胎動(dòng)載荷作為輸 出 測(cè) 量 變 量。
4 仿真分析
4.1 隨機(jī)不平路面模型
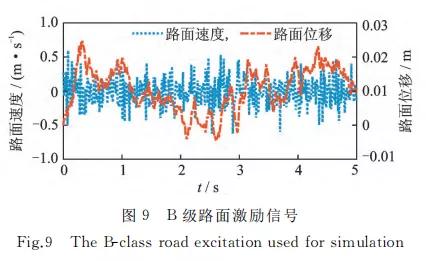
文中采用白噪聲法建立路面模型為 q(t)=-2πf0q(t)+2πn0 Gq(n0) 槡 uω(t)(18) 其中:f0 為路面輸入的下截止頻率;n0 為參考空間 的頻率;Gq(n0)為路面不平度系數(shù);u 為車(chē)速;ω(t) 為白噪聲。Matlab/Simulink仿真所得隨機(jī)不平路面[28]如 圖9所示。
4.2 仿真驗(yàn)證
文中仿真采用的車(chē)輛磁流變半主動(dòng)懸架參數(shù)見(jiàn)表1。
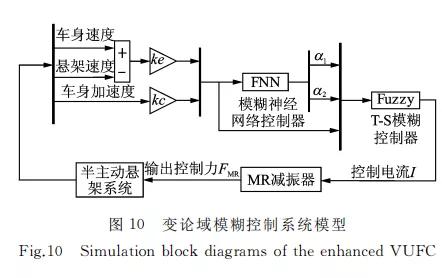
在控制仿真中,采用隨機(jī)路面激勵(lì)作為輸入信 號(hào),基 于 Matlab/Simulink工 具箱 的 改 進(jìn) 變 論 域 模 糊控制器設(shè)計(jì)如圖10所示。
圖中:ke,kc為 T-S模糊控制器比例因子;α1,α2 為 輸入變量伸 縮 因 子。ANFIS采 用模 糊 神 經(jīng) 網(wǎng) 絡(luò) 控 制車(chē)身垂向加速度、車(chē)身相對(duì)速度的論域變化范圍。T-S模糊控制器輸出為控制電流I,同時(shí)I 作為 MR 減振器模型輸入,得到控制阻尼力并作用于半主動(dòng) 懸架系統(tǒng)。仿真條件為 B級(jí)隨機(jī)路面,車(chē)速為20m/s。
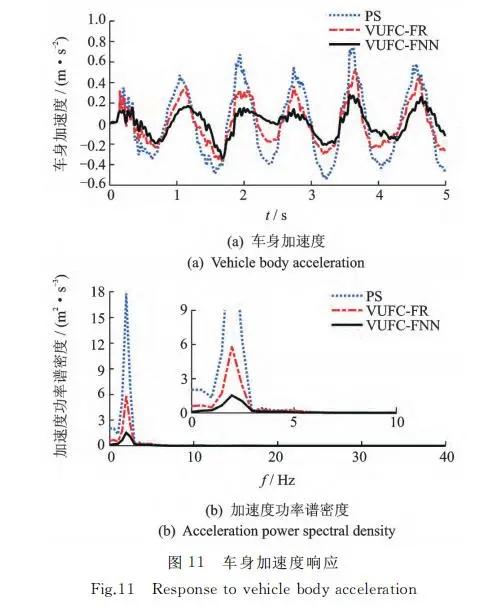
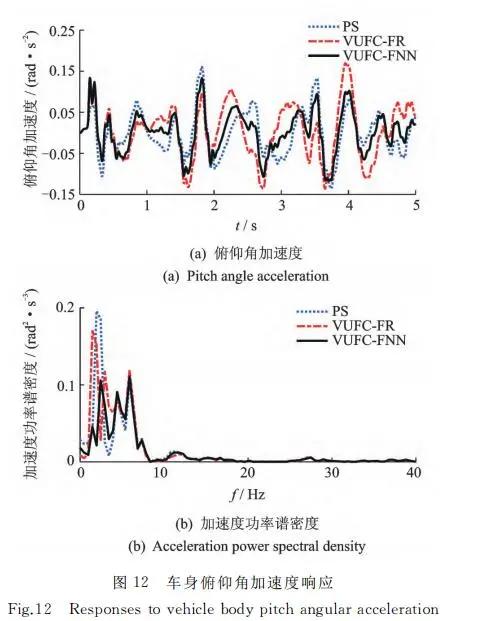
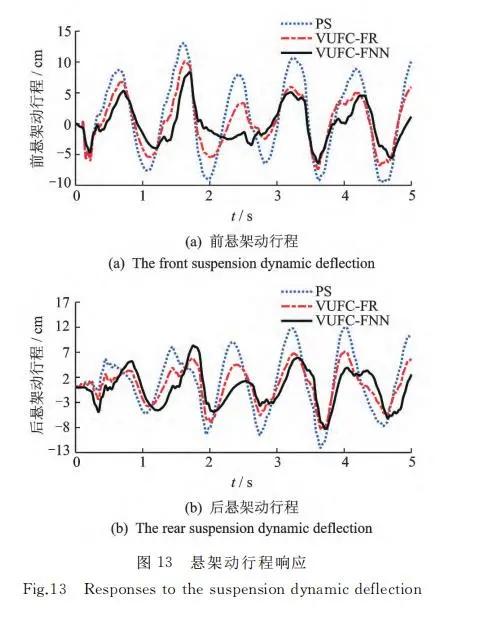
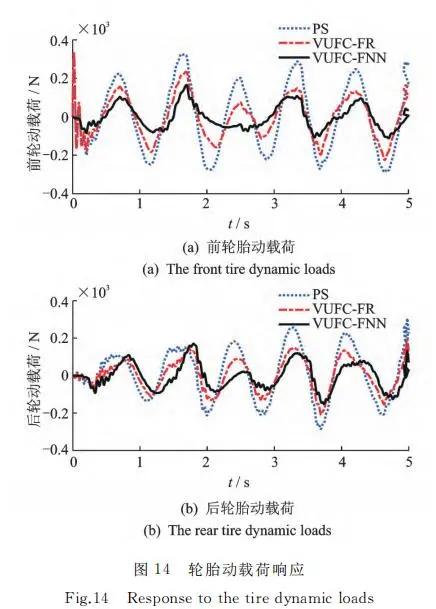
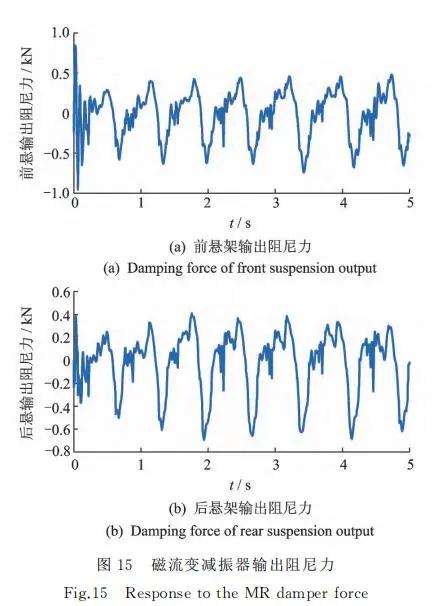
圖11~15分別為隨機(jī)路面激勵(lì)下,車(chē)身加速度 ¨zs、俯仰角加速度¨θ 響應(yīng)曲線及其功率譜密度分析、 懸架動(dòng)行程 Δy、輪胎動(dòng)載荷Ft 以及 MR 減振器輸 出阻尼力FMR。從圖11、圖 12 可 以看 出,相 比 于 被 動(dòng) 和 VU- FU-FR控制懸架,VUFC-FNN 控制的 MR 半主動(dòng) 懸架車(chē)身加速度和俯仰角加速度優(yōu)化效果明顯;同時(shí)在頻域響應(yīng),車(chē)身加速度和俯仰角加速度功率譜 密度也得到了較好改善。
從 圖13可 以 看 出,VUFC-FNN控 制算 法 可 有效減小前后輪懸架動(dòng)行程,防止懸架動(dòng)行程超出限 定范圍而 導(dǎo) 致 懸 架 擊 穿。從 圖 14 可 以 看 出,VU- FU-FNN 控制 MR 半 主動(dòng)懸架可有效改善路面作 用于輪胎的沖擊載荷,提高輪胎壽命同時(shí)保證車(chē)輛 操作穩(wěn)定性。圖15為前后輪 MR 減振器所產(chǎn)生的阻尼力。


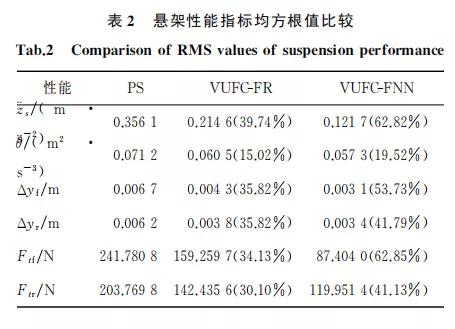
從表2 可以 看 出,VUFC-FNN 控 制 MR 半 主 動(dòng)懸架在隨機(jī)不平路面擾動(dòng)下,各項(xiàng)性能指標(biāo)均有 一定程度 的 提 升,而且優(yōu)化效果明顯優(yōu)于 VUFC- FR控制懸架,說(shuō)明筆者所提出的 VUFC-FNN 控制 算法能夠有效提高車(chē)輛行駛平順性和操作穩(wěn)定性。
5 結(jié)束語(yǔ)
通過(guò)建立1/2 車(chē) 輛 MR 半 主 動(dòng) 懸 架 系 統(tǒng) 動(dòng) 力 學(xué)模型,考慮隨機(jī)路況條件的影響,研究了基于模糊 神經(jīng)網(wǎng)絡(luò)的變論域模糊控制方法,并與被動(dòng)懸架和 基于模糊推理的變論域模糊控制進(jìn)行比較。研究結(jié) 果表明,相比于被動(dòng)懸架,筆者提出的 VUFC-FNN 控制 MR 半主動(dòng)懸架系統(tǒng)各項(xiàng)性能指標(biāo)均有一定 提 升。
車(chē) 身 加 速 度 和 俯 仰 角 加 速 度 分 別 優(yōu) 化 62.82%和19.52%;前后輪懸架動(dòng)行程和輪胎動(dòng)載 荷分別 改 善53.73%,41.79%,62.85%和41.13%。基于模糊神經(jīng)網(wǎng)絡(luò)的變論域模糊控制能適應(yīng)路面工 況的變化,可有效改善車(chē)輛行駛的操作穩(wěn)定性和乘 坐舒適性,且控制效果優(yōu)于基于模糊推理的變論域 模糊控制。
文章選自:《振動(dòng)、測(cè)試與診斷》
作者:龐 輝, 劉 凡, 王 延
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 59



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車(chē)操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車(chē)異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車(chē)大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車(chē)大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評(píng)價(jià)開(kāi)始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
