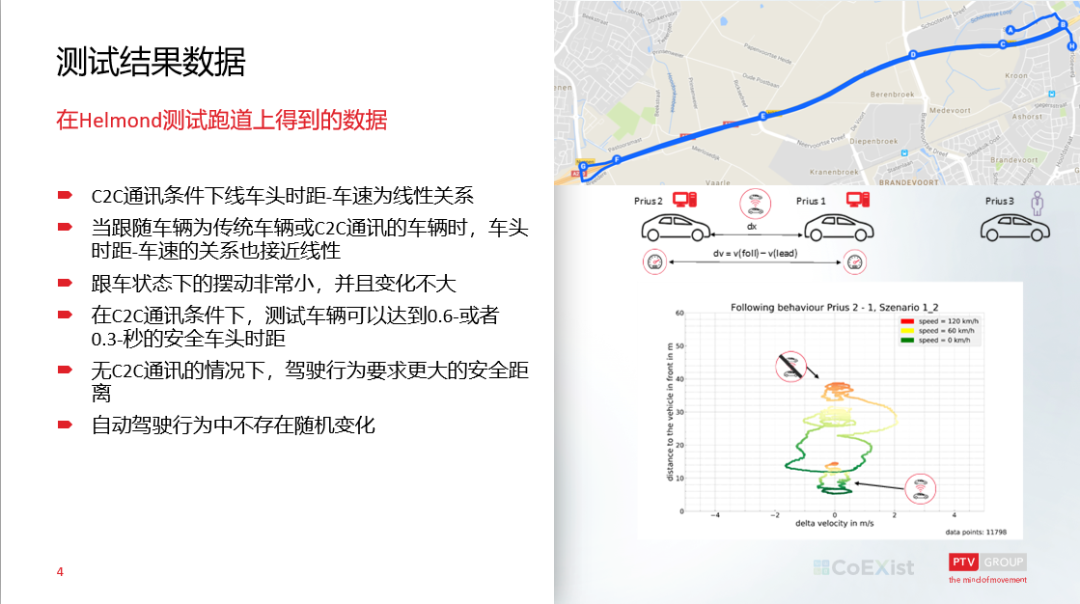
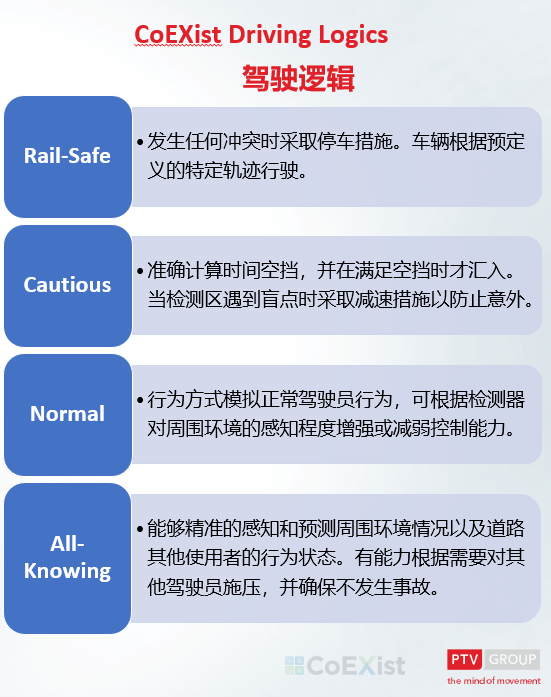
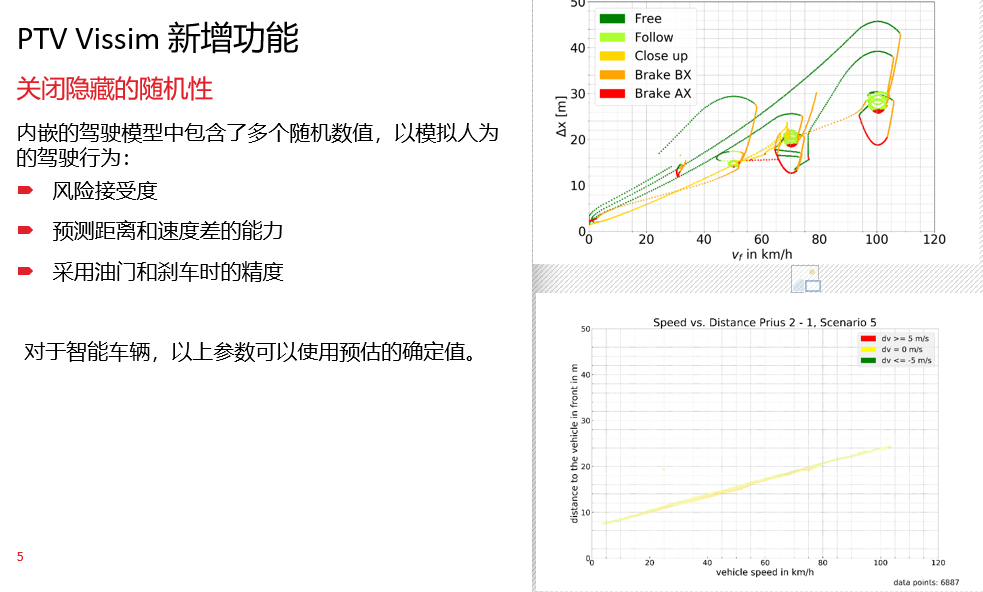
聯(lián)系方式:fei.ju@ptvgroup.com自動駕駛技術的出現(xiàn)和發(fā)展正在改變著我們未來的出行方式���,不久的將來智能網(wǎng)聯(lián)車輛將與傳統(tǒng)車輛共享我們的道路路網(wǎng)�,CoExist項目的設立正是為轉型階段的城市做好前期準備�����。該項目是由歐盟的地平線2020專案資助����,由來自7個國家的15個合作方組成,并于2020年年底結束�,PTV Group作為有著40年交通仿真經驗的專業(yè)軟件公司����,主要負責宏觀及微觀模型中“自動駕駛車輛”的建模工作����,將自動駕駛車輛融入現(xiàn)有的交通模型工具中。在過去的18個月里�,PTV工程師與來自法國研究機構VEDECOM,Renault�,西門子TASS以及斯圖加特大學的合作伙伴保持緊密的合作關系,此外�����,還得到瑞典國家道路和交通研究院�����,荷蘭海爾蒙德市一級佛羅倫薩大學的支持�����。所謂的“聯(lián)合仿真”是一個在VEDECOM控制邏輯�,西門子的Prescan軟件和微觀仿真軟件PTV Vissim之間實現(xiàn)的對接運行�����。其中的場地數(shù)據(jù)是在海爾蒙德市的測試道路上并結合實際交通環(huán)境下采集得到,并進一步分析數(shù)據(jù)和自動駕駛的跟車行為特性����。在此基礎上,PTV公司在Vissim軟件中建立了微觀交通模型��,包括路段����,上下匝道等,并將結果提交給斯圖加特大學的研究人員�����,用于Visum宏觀模型的建立(例如流量延誤函數(shù))�����。CoExist項目中第一個需要解決的問題是�,自動駕駛車輛與傳統(tǒng)車輛在駕駛行為上具有哪些不同的特征?為了獲取可用的研究數(shù)據(jù)���,我們采集了海爾蒙德和埃因霍溫測試跑道上得到的經驗數(shù)據(jù)����,測試中我們使用了三輛車輛,一輛為傳統(tǒng)的駕駛員車輛�����,兩輛為可通訊的自動駕駛車輛���。并且�����,我們在不同的跟車空擋�����,車速,通訊條件下進行了多種方案的測試對比����。此外,在CoExist項目中�����,還對自動駕駛車輛的發(fā)展階段和類型進行了明確的定義。首先����,根據(jù)自動車輛的市場份額,技術能力以及駕駛行為方式將自動駕駛的發(fā)展階段分為了引入階段�,成立階段以及成熟普及階段。同時��,又將自動駕駛車輛的駕駛行為方式根據(jù)駕駛邏輯的精細程度進行了細分�����,分別為Rail-safe, Cautious, Normal以及All-knowing�����,其具體定義為:根據(jù)項目的數(shù)據(jù)分析結果以及駕駛邏輯劃分方式�,我們可以看到,自動駕駛車輛與傳統(tǒng)車輛的行為特性有著較大的不同����,為了使用PTV Vissim軟件實現(xiàn)智能車輛的仿真任務,PTV公司在軟件的原有基礎上�����,開發(fā)了與智能車輛駕駛特性相關的新功能,其中包括:我們知道�,傳統(tǒng)的有人類駕駛員控制的車輛中包含了很多隨機因素�����,這些隨機因素主要反映在車輛在跟車時車速的保持和距離的保持上的擺動較大�,而自動駕駛車輛在跟車時的穩(wěn)定性更高,因此���,Vissim新版本中允許用戶關閉潛在的隨機性算法���。2. 可觀察到的前方的車輛數(shù)/對象數(shù)。自動駕駛車輛由于受到傳感器或檢測器的限制�,往往只能識別到前方一輛車(或兩輛車)的情況,但是同時又能接收到下游信號燈的信號數(shù)據(jù)�。針對這種特性���,Vissim中將車輛可觀察的前方車輛和對象數(shù)進行的區(qū)別考慮����,對象指的是信號燈,停車標識等物理對象�����。3. 根據(jù)前車的車輛類型確定跟車行為參數(shù)�。在原有的Vissim軟件中,只能定義一種跟車行為參數(shù)�����,但是當路網(wǎng)中同時存在自動駕駛車輛和傳統(tǒng)車輛時��,且當不同的車輛互相跟車行駛時����,跟車所采取的駕駛行為也會有很大的區(qū)別,舉個簡單的例子來說�,當互相通訊的自動駕駛車輛相互跟車時,其保持的前后車距肯定大大小于兩輛傳統(tǒng)車輛的跟車距離���。自動形成車隊是智能車輛的一個特有性能���,因此Vissim根據(jù)車隊形成的各種前提條件�,將滿足車輛類型和駕駛行為的車輛在路網(wǎng)中相遇時能夠自動形成車隊�����,保持穩(wěn)定行駛的狀態(tài)����,這一新功能的實現(xiàn)使得Vissim的用戶可以簡單的在軟件中直接實現(xiàn)智能互聯(lián)車輛自動編隊行駛的運行效果。5. 自動駕駛車輛的默認參數(shù)定義�����。根據(jù)CoExist項目中定義的自動駕駛車輛的四種駕駛邏輯����,以及在測試場地上實測得到的數(shù)據(jù),Vissim軟件中新增了適用于自動駕駛車輛的駕駛行為參數(shù)���,用戶可以直接采用定義好的默認參數(shù)值�,也可以根據(jù)自己的實測數(shù)據(jù)在默認參數(shù)的基礎上進行參數(shù)調整�����,這一推薦值對于自動駕駛的研究者來說是很好的建?����;A���。通過以上對微觀仿真軟件Vissim的改進��,這個建模工具以及為自動駕駛車輛做好了準備�,四大參與CoExist項目的道路研究機構將會使用PTV Vissim微觀軟件和PTV Visum宏觀軟件模擬他們的應用場景�,以上也是CoExist項目的三大任務之一。現(xiàn)在�,項目組將著手致力于道路基礎設施和邁入自動駕駛時代的準備工作,來增強地方政府和其他出行利益相關方的應對能力����,迎接一個服務于未來共享出行的城市轉型。
VISSIM 交通流仿真軟件���,自動駕駛技術的訓練場





 廣告
廣告





























































 廣告
廣告 



