




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
FAST-LIO2: 快速直接的激光雷達(dá)-慣性里程計(jì)
2021-09-12 21:53:49· 來(lái)源:同濟(jì)智能汽車(chē)研究所

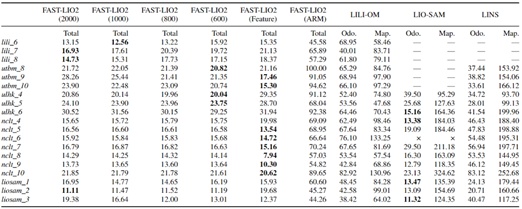
表4 有良好的地面實(shí)況序列的絕對(duì)平移誤差
數(shù)據(jù)集utbm不產(chǎn)生LIO-SAM所需的姿態(tài)四元數(shù)數(shù)據(jù),因此LIO-SAM不適用于所有序列在utbm數(shù)據(jù)集中,表示為—。
×表示系統(tǒng)完全失效
2)漂移基準(zhǔn):表5展示了端到端誤差??傮w趨勢(shì)與RMSE基準(zhǔn)結(jié)果相似。FAST-LIO2或其變體在總共7個(gè)序列中的5個(gè)序列中實(shí)現(xiàn)了最低的漂移。我們?cè)趆ttps://youtu.be/2OvjGnxszf8上的視頻中展示了ulhk_6序列的例子。應(yīng)該注意的是,LILI-OM已經(jīng)為他們自己的每個(gè)序列l(wèi)ili調(diào)整了參數(shù),而FAST-LIO2的參數(shù)在所有序列中保持相同。LIO-SAM在其自己的序列l(wèi)iosam2和liosam3中表現(xiàn)出良好的性能,但無(wú)法在其他序列(如ulhk)上保持它。LINS在liosam和ulhk數(shù)據(jù)集上的表現(xiàn)比LIO-SAM差,在liosam2(來(lái)自[30]的花園序列)中失效,因?yàn)檫@兩個(gè)序列是以很大的旋轉(zhuǎn)速度記錄的,而LINS使用的特征點(diǎn)太少。此外,在大多數(shù)序列中,基于特征的FAST-LIO表現(xiàn)類似于直接方法,除了序列l(wèi)ili_7,它包含許多樹(shù)木和大的開(kāi)放區(qū)域,而特征提取將從樹(shù)木和遠(yuǎn)處建筑物中去除了許多的有效點(diǎn)。
表5 端到端誤差(米)
由于LIO-SAM和LINS都是專為旋轉(zhuǎn)激光雷達(dá)開(kāi)發(fā)的,它們不適用于由固態(tài)激光雷達(dá)Livox Horizon記錄的lili數(shù)據(jù)集。
表示系統(tǒng)完全失效。
D.處理時(shí)間評(píng)估
表6展示了具有不同配置的FAST-LIO2、LILI-OM、LIO-SAM和LINS在所有序列中的處理時(shí)間。FAST-LIO2是一個(gè)集成的里程計(jì)和建圖架構(gòu),在每一步,地圖都會(huì)在里程計(jì)更新后立即更新。因此,總時(shí)間(表6中的“總計(jì)”)包括里程計(jì)中發(fā)生的所有可能過(guò)程,包括特征提?。ɡ?,對(duì)于基于特征的變體)、運(yùn)動(dòng)補(bǔ)償、kNN搜索和狀態(tài)估計(jì),以及建圖。需要注意的是,建圖包括點(diǎn)插入、框式刪除和樹(shù)重新平衡。另一方面,LILI-OM、LIO-SAM和LINS都有單獨(dú)的里程計(jì)(包括特征提取和粗略姿態(tài)估計(jì))和建圖(例如LILI-OM[17]中的后端融合、增量平滑和在LIO-SAM[30]中的建圖以及在LINS[31]中的建圖優(yōu)化),在每次激光雷達(dá)掃描過(guò)程中它們的平均處理時(shí)間在表6中分別用“Odo”和“Map”表示。我們,將兩次處理時(shí)間相加與FAST-LIO2進(jìn)行比較。
從表6中,我們可以看到FAST-LIO2比其他LIO方法消耗的時(shí)間少得多,比LILI-OM快8倍,比LIO-SAM快10倍,比LINS快6倍。即使只考慮其他方法對(duì)里程計(jì)的處理時(shí)間,F(xiàn)AST-LIO2在除了四個(gè)序列之外的大多數(shù)序列中仍然更快。FAST-LIO2的整體處理時(shí)間,包括里程計(jì)和建圖,幾乎與LIO-SAM的里程計(jì)部分相同,比LILI-OM快3倍,比LINS快2倍以上。比較FAST-LIO2的不同變體,不同地圖大小的處理時(shí)間非常相似,這意味著使用我們的ikd-樹(shù)進(jìn)行映射和kNN搜索對(duì)地圖大小不敏感。此外,基于特征的變體和使用直接方法的FAST-LIO2的處理時(shí)間大致相似。盡管特征提取需要額外的處理時(shí)間來(lái)提取特征點(diǎn),但它會(huì)為后續(xù)的kNN搜索和狀態(tài)估計(jì)帶來(lái)更少的點(diǎn)(因此時(shí)間更少)。另一方面,直接方法節(jié)省了點(diǎn)配準(zhǔn)的特征提取時(shí)間。考慮到FAST-LIO2卓越的計(jì)算效率,我們?cè)贙hadasVIM3(ARM)嵌入式計(jì)算機(jī)上使用默認(rèn)地圖大小(1000m,參見(jiàn)VI-C)進(jìn)一步實(shí)現(xiàn)了它。運(yùn)行時(shí)結(jié)果表明,F(xiàn)AST-LIO2還可以實(shí)現(xiàn)10Hz的實(shí)時(shí)性能,這是任何之前的工作都沒(méi)有在基于ARM的平臺(tái)上實(shí)現(xiàn)過(guò)的。
表6 每個(gè)掃描基準(zhǔn)的平均處理時(shí)間(以毫秒為單位)
7 真實(shí)場(chǎng)景實(shí)驗(yàn)
A.平臺(tái)
除了對(duì)主要是在地面上收集到的數(shù)據(jù)集進(jìn)行基準(zhǔn)評(píng)估,我們也用由其他平臺(tái)收集到的各種各樣的富有挑戰(zhàn)性的數(shù)據(jù)來(lái)測(cè)試我們的FAST-LIO2(如圖6所示),這些平臺(tái)包括用于開(kāi)發(fā)無(wú)人機(jī)導(dǎo)航技術(shù)的280mm軸距四旋翼無(wú)人機(jī),用于移動(dòng)制圖的手持平臺(tái)以及用于航空測(cè)繪的GPS導(dǎo)航750mm軸距四旋翼無(wú)人機(jī)。280mm軸距四旋翼無(wú)人機(jī)被用于室內(nèi)劇烈飛行試驗(yàn),參見(jiàn)VII-B2部分,因此其激光雷達(dá)面向前方安裝。由Ambit-Geospatial公司開(kāi)發(fā)的750mm軸距四旋翼無(wú)人機(jī)用于空中掃描,參見(jiàn)VII-C部分,因此其激光雷達(dá)面向地面。在所有平臺(tái)中,我們均采用固態(tài)3D激光雷達(dá)LivoxAvia,它具有內(nèi)置IMU單元(型號(hào)BMI088),橫向70.4°縱向77.2°的圓形視場(chǎng),以及一種不同于之前在VI部分中使用的LivoxHorizon和Velodyne激光雷達(dá)那樣的非常規(guī)的非重復(fù)掃描模式。由于FAST-LIO2并不需要提取特征,自然地它適合這種新型激光雷達(dá)。在以下所有實(shí)驗(yàn)中,F(xiàn)AST-LIO2使用默認(rèn)配置(即地圖大小為1000m的直接法)。除非另有說(shuō)明,掃描速率均設(shè)置為100Hz,計(jì)算平臺(tái)為之前部分中使用過(guò)的DJImanifold2-C。

圖6.三種不同的平臺(tái):(a)280毫米軸距小型四旋翼無(wú)人機(jī)搭載前視LivoxAvia激光雷達(dá),(b)手持平臺(tái),(c)750毫米軸距四旋翼無(wú)人機(jī)搭載下視LivoxAvia激光雷達(dá)。所有三個(gè)平臺(tái)都搭載相同的DJIManifold-2C機(jī)載計(jì)算機(jī)。真實(shí)世界實(shí)驗(yàn)的視頻可在https://youtu.be/2OvjGnxszf8獲得。
B. 私有數(shù)據(jù)集
1)處理時(shí)間的詳細(xì)評(píng)估:為了驗(yàn)證FAST-LIO2的實(shí)時(shí)性能,我們使用手持平臺(tái)在大型室外-室內(nèi)混合場(chǎng)景中以100Hz的掃描速率收集序列。傳感器在前進(jìn)約650m后返回起始位置。應(yīng)該注意的是,LILI-OM也支持固態(tài)激光雷達(dá),但它在此數(shù)據(jù)中效果不理想,因?yàn)槠涮卣魈崛∧K在100Hz掃描速率下產(chǎn)生的特征太少。FAST-LIO2實(shí)時(shí)構(gòu)建的地圖如圖7所示,其漂移?。▋H0.14m),與衛(wèi)星地圖吻合良好。

圖7 大型場(chǎng)景實(shí)驗(yàn)
至于計(jì)算效率,我們將FAST-LIO2與其前身FAST-LIO[22]在Intel(Manifold2-C)計(jì)算機(jī)上比較。對(duì)于FAST-LIO2,我們還會(huì)在機(jī)載計(jì)算機(jī)上的ARM(KhadasVIM3)上進(jìn)行測(cè)試。這兩種方法的區(qū)別在于,F(xiàn)AST-LIO是一種基于特征的方法,它在每一步都會(huì)檢索當(dāng)前視場(chǎng)中的地圖點(diǎn),為kNN搜索構(gòu)建一個(gè)新的靜態(tài)k-d樹(shù)。用于處理掃描的各個(gè)組件的詳細(xì)時(shí)間消耗顯示在表7中。預(yù)處理是指數(shù)據(jù)的接收和格式化,對(duì)于FAST-LIO和FAST-LIO2預(yù)處理是相同的,用時(shí)都低于0.1ms。FAST-LIO的特征提取每次掃描用時(shí)0.9ms,這是FAST-LIO2節(jié)省的。特征提取導(dǎo)致Fast-LIO比FAST-LIO2產(chǎn)生更少的點(diǎn)數(shù)(447對(duì)756),因此在狀態(tài)估計(jì)上花費(fèi)的時(shí)間更少(0.99毫秒對(duì)1.66毫秒)。因此,兩種方法的總里程計(jì)時(shí)間非常接近(FAST-LIO為1.92毫秒,而FAST-LIO2為1.69毫秒)。這兩種方法在制圖模塊呈現(xiàn)巨大差異,模塊包括FAST-LIO的地圖點(diǎn)檢索和k-d樹(shù)構(gòu)建,以及FAST-LIO2的點(diǎn)插入和由于地圖移動(dòng)和樹(shù)重新平衡而導(dǎo)致的框式刪除。可以看出,F(xiàn)AST-LIO每次掃描的平均制圖時(shí)間超過(guò)10毫秒,因此無(wú)法實(shí)時(shí)處理這個(gè)大場(chǎng)景。另一方面,F(xiàn)AST-LIO2的制圖時(shí)間遠(yuǎn)低于采樣周期。FAST-LIO2每次掃描處理756個(gè)點(diǎn)(包括里程計(jì)和制圖)的總時(shí)間對(duì)于Intel處理器僅為1.82ms,對(duì)于ARM處理器為5.23ms。
表7 處理激光雷達(dá)掃描時(shí)各個(gè)組件的平均時(shí)間消耗(以毫秒為單位)

每次掃描的時(shí)間消耗和地圖點(diǎn)數(shù)如圖8所示??梢钥闯?,在ARM處理器上運(yùn)行的FAST-LIO2的處理時(shí)間偶爾超過(guò)采樣周期10毫秒,但這種情況很少發(fā)生,平均處理時(shí)間遠(yuǎn)低于采樣周期。偶爾的超時(shí)通常不會(huì)影響后續(xù)的控制器,因?yàn)镮MU傳播的狀態(tài)估計(jì)可以在這個(gè)短時(shí)期內(nèi)使用。在Intel處理器上,F(xiàn)AST-LIO2的處理時(shí)間始終低于采樣周期。另一方面,由于地圖點(diǎn)數(shù)量的增加,F(xiàn)AST-LIO的處理時(shí)間迅速增加到采樣周期以上。注意到,即使面對(duì)大量地圖點(diǎn)的情況下,F(xiàn)AST-LIO2的處理時(shí)間也顯著減少。由于FAST-LIO僅保留其當(dāng)前視場(chǎng)角內(nèi)的地圖點(diǎn),如果LiDAR面對(duì)一個(gè)包含很少先前采樣的地圖點(diǎn)的新區(qū)域,該數(shù)字可能會(huì)下降。如上所述,即使地圖點(diǎn)較少,F(xiàn)AST-LIO的處理時(shí)間仍然要長(zhǎng)得多。此外,由于FAST-LIO在每一步構(gòu)建一個(gè)新的k-d樹(shù),構(gòu)建時(shí)間的時(shí)間復(fù)雜度為O(nlogn)[40],其中n是當(dāng)前視場(chǎng)中的地圖點(diǎn)數(shù)。這就是FAST-LIO的處理時(shí)間幾乎與地圖大小呈線性相關(guān)的原因。相比之下,我們ikd-樹(shù)的增量更新具有O(logn)的時(shí)間復(fù)雜度,導(dǎo)致處理時(shí)間的增長(zhǎng)相對(duì)于地圖大小的增加要慢得多。

圖8 FAST-LIO和FAST-LIO2每次LiDAR掃描的處理時(shí)間。
2)無(wú)人機(jī)劇烈飛行實(shí)驗(yàn):為了展示FAST-LIO2在移動(dòng)機(jī)器人平臺(tái)中的應(yīng)用,我們部署了一個(gè)攜帶LivoxAVIA激光雷達(dá)傳感器的小型四旋翼無(wú)人機(jī),并進(jìn)行了如圖9所示的激烈翻轉(zhuǎn)實(shí)驗(yàn)。本次實(shí)驗(yàn)中,無(wú)人機(jī)先從地面起飛,在1.2m高度懸停一段時(shí)間,然后進(jìn)行快速翻轉(zhuǎn),然后在從FAST-LIO2獲取狀態(tài)反饋的流形模型預(yù)測(cè)控制器[62]的控制下返回懸停飛行。FAST-LIO2估計(jì)的姿態(tài)如圖9(d)所示,與實(shí)際的無(wú)人機(jī)姿態(tài)非常吻合。環(huán)境的實(shí)時(shí)建圖如圖10所示。另外,圖11顯示了實(shí)驗(yàn)過(guò)程中的位置、姿態(tài)、角速度和線速度。翻轉(zhuǎn)期間的平均和最大角速度分別達(dá)到912度/秒和1198度/秒(從50.8秒到51.2秒)。FAST-LIO2平均每次掃描僅需2.01ms,足以滿足控制器的實(shí)時(shí)性要求。通過(guò)提供高精度里程計(jì)和100Hz的高分辨率環(huán)境3D地圖,F(xiàn)AST-LIO2非常適合機(jī)器人的實(shí)時(shí)控制和避障。例如,我們之前的工作[63]展示了FAST-LIO2在自主無(wú)人機(jī)上的應(yīng)用,可在復(fù)雜的室內(nèi)和室外環(huán)境中躲避動(dòng)態(tài)小物體(低至9毫米)。
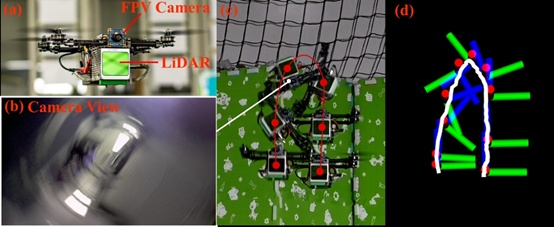
圖9 翻轉(zhuǎn)實(shí)驗(yàn)。(a)小型無(wú)人機(jī);(b)在翻轉(zhuǎn)期間顯示第一人稱視角圖像的車(chē)載攝像頭;(c)無(wú)人機(jī)翻轉(zhuǎn)過(guò)程中的第三人稱視角圖像;(d)使用FAST-LIO2估計(jì)的無(wú)人機(jī)姿態(tài)。

點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 109



 廣告
廣告 編輯推薦




最新資訊
-
開(kāi)年豪擲1.8億搶用戶,又一車(chē)企加入“價(jià)格
2026-03-04 16:05
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車(chē)操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車(chē)異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車(chē)大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車(chē)大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
