




 廣告
廣告





















































駕駛域計算平臺架構(gòu)核心軟件和底層硬件梳理
2021-09-15 20:40:05· 來源:智駕最前沿

隨著智能網(wǎng)聯(lián)汽車的發(fā)展,車載傳感器的數(shù)量日益增加,日趨完善的性能對車載計算平臺算力的需求更高。相較于低級別的自動駕駛,高等自動駕駛系統(tǒng)從傳感器獲取的數(shù)
隨著智能網(wǎng)聯(lián)汽車的發(fā)展,車載傳感器的數(shù)量日益增加,日趨完善的性能對車載計算平臺算力的需求更高。相較于低級別的自動駕駛,高等自動駕駛系統(tǒng)從傳感器獲取的數(shù)據(jù)量大大增加,而自動駕駛系統(tǒng)的良好運行需要車載計算平臺對這些數(shù)據(jù)進行準確、高效的處理,高級別自動駕駛中車載計算平臺的芯片算力需求還將持續(xù)提升。
智能網(wǎng)聯(lián)汽車計算平臺架構(gòu)核心構(gòu)成:硬件平臺+系統(tǒng)軟件+功能軟件。
一、核心軟件梳理
(一)核心軟件產(chǎn)業(yè)格局總覽
駕駛域計算平臺涉及的軟件,從底層往上,主要包括系統(tǒng)軟件、功能軟件、應用軟件。

駕駛域軟件層分類:系統(tǒng)軟件-功能軟件-應用軟件
系統(tǒng)軟件層面,主要包括BSP(板級支持包)、hypervisor(虛擬化)、狹義OS內(nèi)核、中間件組件等。
功能軟件層面,主要為自動駕駛的核心共性功能模塊,包括自動駕駛通用框架、網(wǎng)聯(lián)模塊、運控模塊等,功能軟件結(jié)合系統(tǒng)軟件,共同構(gòu)成宏觀意義上給的自動駕駛操作系統(tǒng)。
應用軟件層面,應用軟件主要包括場景算法(涵蓋數(shù)據(jù)感知、多元融合、決策規(guī)劃、控制執(zhí)行等)、數(shù)據(jù)地圖等。
針對不同軟件層,我們從傳統(tǒng)tier1、OEM及其子公司、科技巨頭、第三方軟件供應商四個維度對產(chǎn)業(yè)主要參與方進行了梳理。

駕駛域不同軟件層具備業(yè)務布局的公司梳理
(二)系統(tǒng)軟件1:硬件抽象層—Hypervisor 與 BSP
1. Hypervisor
管理并虛擬化底層硬件Hypervisor 虛擬化技術可以有效實現(xiàn)資源整合和隔離。自動駕駛操作系統(tǒng)是基于異構(gòu)分布硬件,應用程序如 AI 計算和實時安全功能可能分別依賴不同的內(nèi)核環(huán)境和驅(qū)動,但在物理層面共享 CPU 等。

Hypervisor典型架構(gòu)
主流的虛擬機技術提供商包括BlackBerry QNX Hypervisor及Intel與Linux基金會主導的ACRN(開源)。截至目前,只有QNX Hypervisor應用到量產(chǎn)車型,它也是目前市場上唯一被認可功能安全等級達到ASIL D級的虛擬化操作系統(tǒng)。
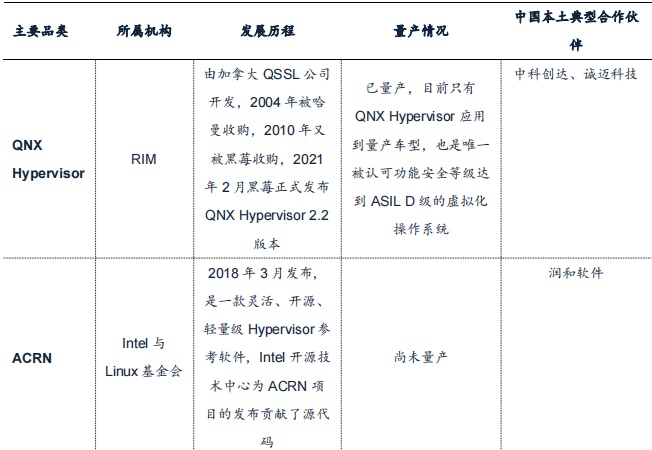
車載Hypervisor 主要供應商
注:(1)RIM 為黑莓母公司;(2)2017 年中科創(chuàng)達、誠邁科技入選黑莓 VAI 計劃,一旦成為 VAI 項目合作伙伴,將可以基于黑莓的嵌入式技術開發(fā)集成服務、安全關鍵型解決方案,包括黑莓 QNX Neutrino 實時操作系統(tǒng)、QNX Momentics 工具套件、QNX 管理程序、應用程序和媒體 QNX SDK、QNX 無線架構(gòu)、QNX 認證操作系統(tǒng)、QNX 醫(yī)用操作系統(tǒng)、Certicom 工具包、Certicom 管理的公鑰基礎設施以及 Certicom 資產(chǎn)管理系統(tǒng),應用包括汽車電子、醫(yī)療器械、智能電網(wǎng)、動力控制和工業(yè)自動化;(3)潤和軟件已開發(fā)出基于IntelApollolake 平臺并采用 ACRN 虛擬化技術方案的智能駕駛艙方案
2. BSP
保證硬件運行的底層軟件,不同的OS對應于不同定義形式的BSP
BSP(Board Support Package),中文即板級支持包。對于一般的嵌入式系統(tǒng),硬件部分需要嵌入式硬件工程師設計硬件電路,新出廠的電路板,需要BSP來保證其能穩(wěn)定工作,在此基礎之上,才能進行下一步的軟件開發(fā)。
BSP是介于主板硬件和操作系統(tǒng)之間的系統(tǒng)軟件之一,主要目的是為了支持操作系統(tǒng),使之能夠更好的運行于硬件主板。BSP是相對于操作系統(tǒng)而言的,不同的操作系統(tǒng)對應于不同定義形式的BSP,例如VxWorks的BSP和Linux的BSP相對于某一CPU來說盡管實現(xiàn)的功能一樣,可是寫法和接口定義是完全不同的,所以寫B(tài)SP一定要按照該系統(tǒng)BSP的定義形式來寫,這樣才能與上層OS保持正確的接口,良好的支持上層OS。
BSP同時具有硬件相關性和操作系統(tǒng)相關性。因此BSP的開發(fā)不僅需要具備一定的硬件知識,例如CPU的控制、中斷控制器的設置、內(nèi)存控制器的設置及有關的總線規(guī)范等,同時還要求掌握操作系統(tǒng)所定義的BSP接口。
嵌入式系統(tǒng)對應的BSP開發(fā)內(nèi)容
車載芯片BSP涉及到的企業(yè)比較多,涵蓋芯片制造商、第三方軟件服務商、整車廠。但是不同類型的開發(fā)商具備不同的特點,比如芯片制造商,最懂底層硬件,但開發(fā)人手有限,整車廠軟件能力積累相對不足,第三方軟件服務商往往具備較好的競爭優(yōu)勢,通常具備豐富的底層開發(fā)經(jīng)驗對底層硬件和上層軟件理解深刻,技術較強,人員規(guī)模擴張性也較好。
車載芯片BSP開發(fā)領域典型參與方梳理
(三)系統(tǒng)軟件2:操作系統(tǒng)標準與 OS 內(nèi)核
1.車載OS分類
車控OS與座艙OS從功能實現(xiàn)角度,車載操作系統(tǒng)可以大致分為車控操作系統(tǒng)和智能座艙操作系統(tǒng):
(1)車控操作系統(tǒng):主要對應自動駕駛域、動力域、底盤域,用于實現(xiàn)車身底盤控制、動力系統(tǒng)和自動駕駛;
(2)智能座艙操作系統(tǒng):主要對應于座艙域,用于實現(xiàn)車載娛樂信息系統(tǒng)功能以及實現(xiàn)HMI相應功能。
在前述基礎上,我們可以進一步劃分車控操作系統(tǒng):
(1)嵌入式實時操作系統(tǒng)RTOS:用于傳統(tǒng)的車輛控制,適用于動力系統(tǒng)與底盤控制等領域;
(2)基于POSIX標準的操作系統(tǒng),適用于自動駕駛所需要的高性能計算和高寬帶通信。

車控操作系統(tǒng)分類
傳統(tǒng)車控ECU采用的符合OSEK/VDX和Classic AUTOSAR標準的RTOS。在傳統(tǒng)的分布式EE架構(gòu)下,特定的ECU針對處理特定功能,常見ECU包括EMS發(fā)動機電控系統(tǒng),ABS制動防抱死控制、變速箱牽引力控制TCU、電子穩(wěn)定控制EPS、電子動力轉(zhuǎn)向EPS,新能源汽車整車控制VCU,電池管理系統(tǒng)BMS等。通常情況下,車用ECU主要由MCU、存儲器、I/O和外圍電路組成,其中MCU為核心。
傳統(tǒng)ECU實施的功能有限,運行相對簡易,并不需要高性能的OS來實現(xiàn)資源的調(diào)度和分配。不過因為涉及車控環(huán)節(jié),相關系統(tǒng)屬于復雜測控系統(tǒng),如果系統(tǒng)任務的響應不及時或有延遲過大,就可能導致嚴重的安全隱患。因此汽車電控ECU必須是高穩(wěn)定性的嵌入式實時性操作系統(tǒng)(RTOS),實時性的含義是系統(tǒng)保證在一定時間限制內(nèi)完成特定功能,目前主流的電控操作系統(tǒng)基本都兼容OSEK/VDX和ClassicAUTOSAR這兩類汽車電子軟件標準。
值得指出的是,AUTOSAR與OSEK都是汽車電子軟件的標準,AUTOSAR基于OSEK/VDX發(fā)展而來。OSEK/VDX是基于ECU開發(fā)的操作系統(tǒng)標準,起源于20世紀90年代,AUTOSAR基于整體汽車電子開發(fā)的功能標準,發(fā)起于2003年。
符合OSEK/VDX標準的典型車控OS
自動駕駛OS目前大多參考Adaptive AUTOSAR平臺,其定義采用了基于POSIX標準的操作系統(tǒng),可以為支持POSIX標準的操作系統(tǒng)及不同的應用需求提供標準化的平臺接口和應用服務。從實際功能執(zhí)行來看,可以將ECU的軟件平臺分為三類:基于信息娛樂的ECU、傳統(tǒng)的基于控制的ECU,以及執(zhí)行自動駕駛功能的ECU。
Classic AUTOSAR標準解決了傳統(tǒng)車控ECU的需求,但是,如高級輔助駕駛和自動駕駛,需要在車輛上引入高度復雜和計算資源需求量大的軟件,同時這些軟件在車輛上必須完全兼容和絕對安全,而且未來隨著汽車電子及軟件功能的大幅增長,最終可能向基于中央計算機的車輛集中式電子電氣架構(gòu),對于自動駕駛域控制器或計算平臺這種控制器,Classic AUTOSAR無法滿足其需求,需要高度靈活、高性能且支持HPC、動態(tài)通訊等特性的新軟件架構(gòu)平臺。
2018年,為了迎合未來汽車智能化、網(wǎng)聯(lián)化的需求,AUTOSAR聯(lián)盟推出了一個全新的平臺,將AP加入到原有的AUTOSAR平臺中,形成Adaptive AUTOSAR平臺,并于2018年10月迎來了適用于面向量產(chǎn)的首次發(fā)布,另外還將原有平臺更名為Classic AUTOSAR平臺。
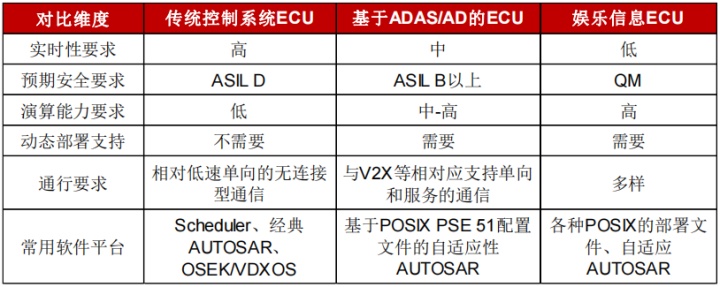
不同類型ECU對軟件平臺的要求
2. 駕駛域OS內(nèi)核
QNX、Linux、Vxworks三分天下
駕駛域OS按照定義范圍可大致分為狹義和廣義兩種:
(1)狹義OS:特指可直接搭載在硬件上的OS內(nèi)核;
(2)廣義OS:從下至上包括從BSP、OS內(nèi)核、中間件及庫組件等系統(tǒng)軟件。
OS內(nèi)核又稱為底層OS,旨在提供操作系統(tǒng)最基本的功能,負責管理系統(tǒng)的進程、內(nèi)存、設備驅(qū)動程序、文件和網(wǎng)絡系統(tǒng),決定著系統(tǒng)的性能和穩(wěn)定性。
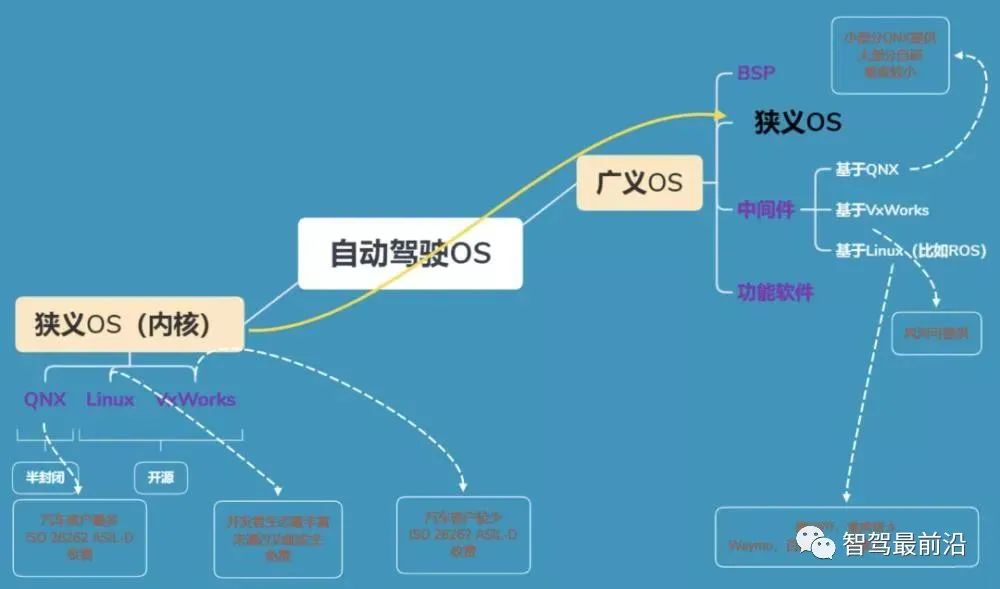
狹義OS主要包括QNX、Linux和VxWorks
自動駕駛OS內(nèi)核的格局較穩(wěn)定,主要產(chǎn)品為QNX(Blackberry)、Linux(開源基金會)、VxWorks(Wind River System)。因打造全新OS需要花費太大的人力、物力,目前基本沒有企業(yè)會開發(fā)全新的OS內(nèi)核。目前Waymo、百度、特斯拉、Mobileye等企業(yè)都是在現(xiàn)有的OS內(nèi)核基礎上自研中間件和應用軟件。
此外,QNX系統(tǒng)生態(tài)較為封閉,Linux和VxWorks均是開源。Linux和VxWorks所有內(nèi)核源代碼都向客戶開放,客戶可做一定的裁剪。如果選擇QNX內(nèi)核,整車廠無法做裁剪,但客戶可自己編寫中間件和應用軟件。2017年黑莓公司成立VAI(ValueAdded Integrator)項目,中科創(chuàng)達、誠邁科技作為以系統(tǒng)集成商的身份加入黑莓嵌入式合作伙伴計劃VAI項目,將基于黑莓QNX嵌入式技術(包括黑莓QNX Neutrino實時操作系統(tǒng)、QNX管理程序、QNX無線架構(gòu)、QNX認證操作系統(tǒng)等)提供集成服務解決方案,其應用包括汽車電子、醫(yī)療器械、智能電網(wǎng)、動力控制和工業(yè)自動化。
從費用和開發(fā)難度看,QNX需要付費,不過開發(fā)難度較小,代碼量也較少,Linux不需要收費,但是開發(fā)難度較大,容易出Bug。
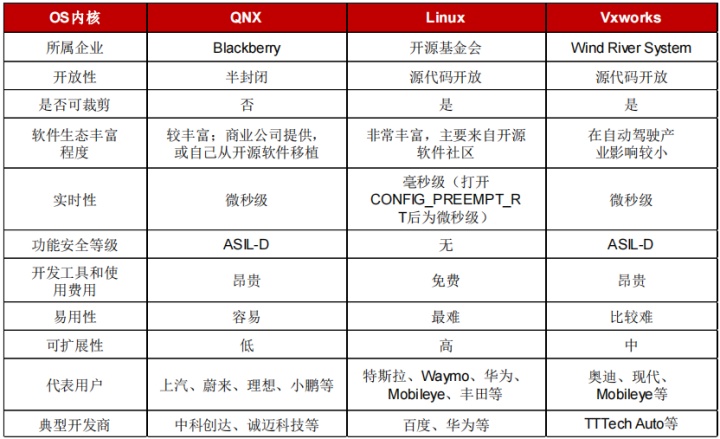
主流OS內(nèi)核對比
(四)功能軟件:中間件及核心共性功能模塊
1.中間件
中間件是介于應用系統(tǒng)和系統(tǒng)軟件之間的一類軟件,位于客戶機服務器的操作系統(tǒng)之上,管理計算資源和網(wǎng)絡通信。根據(jù)IDC的定義,中間件是一種獨立的軟件服務程序,分布式應用軟件借助這種軟件在不同的技術之間共享資源。
中間件的主要任務,是負責各類應用軟件模塊之間的通信以及對底層系統(tǒng)資源的調(diào)度。它的優(yōu)點,是可以大大降低應用層軟件的開發(fā)難度,使研發(fā)工程師可以完全把注意力集中到功能算法的開發(fā)上。
而目前最為業(yè)內(nèi)所熟知的中間件當屬Classic AUTOSAR中的RTE(Runtime Environment),它不僅負責上層SWC(Sofware Component)之間的通訊,也同時負責對SWC進行調(diào)度以及對底層操作系統(tǒng)及通訊服務的調(diào)用。

中間件在分布式系統(tǒng)中的用途示意圖
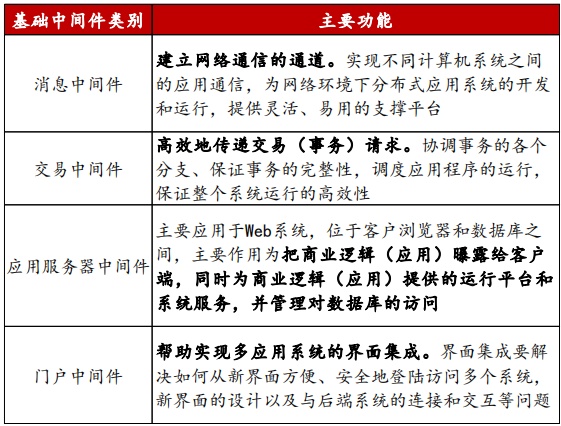
基礎中間件類別劃分
智能駕駛中間件的市場空間正在快速增長。以TTTech Auto(TTTech拆分的汽車子業(yè)務板塊)為例,該公司推出的智能駕駛中間件(MotionWise安全軟件平臺)客戶包括安波福、奧迪、寶馬、大陸集團、戴姆勒等,營收規(guī)模從2018年的1920萬美元增加至2019年的8872萬美元,2020年預計營收在1.9億至2億美元。
不過,由于中間件涉及到較高的功能安全等級,市場門檻也要高于應用層軟件。
中間件領域,傳統(tǒng)Tier1和科技巨頭布局較少。從主要自動駕駛Tier1產(chǎn)品與場景布局來看,博世、大陸和采埃孚在國外Tier1中布局最全面,其中博世和采埃孚在2020年均推出面向自動駕駛的中間件產(chǎn)品。
2020年7月,博世推出針對高級自動駕駛應用的中間件—Iceoryx (冰羚),兼容ROS2和Adaptive AutoSAR的接口,滿足不同開發(fā)階段的需求。
2020年12月,采埃孚發(fā)布中間件ZF Middleware,提供可以集成到整車制造商軟件平臺的模塊化解決方案。同時,該中間件將于2024年搭載在量產(chǎn)車輛上。
值得注意的是,國外Tier 1在功能落地的同時,開始滲透底層系統(tǒng)研發(fā),搭建系統(tǒng)與軟件應用之間的連接橋梁。博世、采埃孚相繼發(fā)布中間件產(chǎn)品,以期通過全面的傳感器產(chǎn)品布局,為主機廠集中配置自動駕駛方案,降低系統(tǒng)集成的復雜性,降低開發(fā)成本和加快產(chǎn)品落地。

自動駕駛感知層產(chǎn)品及場景算法主要布局梳理
2. 核心共性功能模塊
除API中間件外,自動駕駛的核心共性功能模塊構(gòu)成了功能軟件的主要部分。核心共性功能模塊包括自動駕駛通用框架、網(wǎng)聯(lián)、云控等,結(jié)合系統(tǒng)軟件,共同構(gòu)成完整的自動駕駛操作系統(tǒng),支撐自動駕駛技術實現(xiàn)。
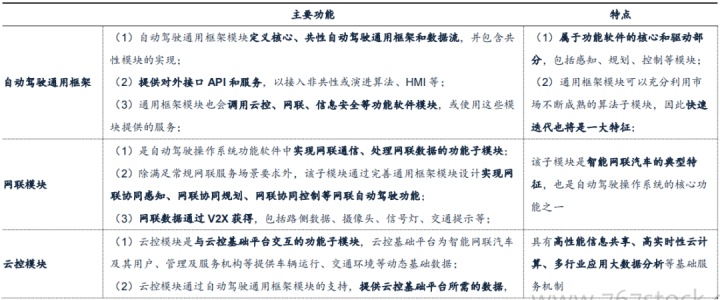

計算平臺功能軟件中的五大核心共性模塊
(五)應用軟件:種類多,包括場景算法、數(shù)據(jù)地圖等
應用層軟件運行在廣義操作系統(tǒng)之上,具體負責自動駕駛功能實現(xiàn)。典型的計算平臺,在裝載運行系統(tǒng)軟件和功能軟件構(gòu)成的操作系統(tǒng)后,向上支撐應用軟件開發(fā),最終實現(xiàn)整體功能實現(xiàn)。應用層軟件內(nèi)容繁雜,包括場景算法(涵蓋數(shù)據(jù)感知、決策規(guī)劃、控制執(zhí)行等)、數(shù)據(jù)地圖、人機交互(HMI)等。
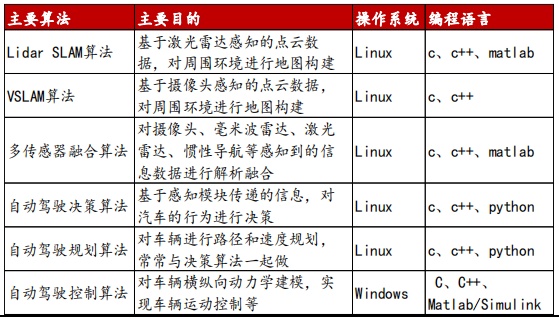
我們僅以場景算法進行闡述,典型的場景算法設計數(shù)據(jù)感知、決策規(guī)劃、控制執(zhí)行等。其中感知類算法包括SLAM算法(涵蓋視覺處理、激光雷達、多傳感器融合等)、自動駕駛感知算法。決策類算法包括自動駕駛規(guī)劃算法、自動駕駛決策算法,執(zhí)行類算法主要為自動駕駛控制算法。
目前該領域涉足的產(chǎn)業(yè)參與方繁多,從整車廠、傳統(tǒng)Tier1,到初創(chuàng)類公司、科技巨頭以及獨立的軟件供應商等在該領域都積極發(fā)力。
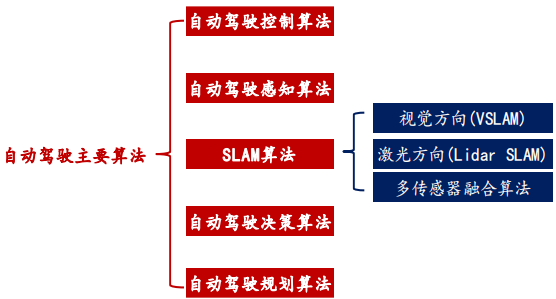
應用層主要算法梳理
應用層算法主要目的及編程語言
數(shù)據(jù)地圖(高精度地圖)也是應用層又一典型軟件。傳統(tǒng)車載導航地圖使用者是人,傳統(tǒng)電子導航地圖會描繪出道路,部分道路會區(qū)分車道,而高精度地圖不僅會描繪道路,會真實地反映出道路的實際樣式,高精度地圖為了讓自動駕駛系統(tǒng)更好地識別交通情況,會把道路形狀的細節(jié)進行詳細、精確展示。
高精度地圖對于智能駕駛不可或缺,從視野范圍看,高精度地圖不受遮擋,不存在距離和視覺的缺陷,在特殊天氣條件下,高精度地圖依舊可以發(fā)揮作用;從誤差看,高精度地圖可以有效消除部分傳感器誤差,在部分路況條件下,可以有效對現(xiàn)有傳感器系統(tǒng)進行補充修正。此外,高精度地圖還可以構(gòu)建駕駛經(jīng)驗數(shù)據(jù)庫,通過多維時空數(shù)據(jù)的挖掘,分析危險區(qū)域,為駕駛者提供新的駕駛經(jīng)驗數(shù)據(jù)集。
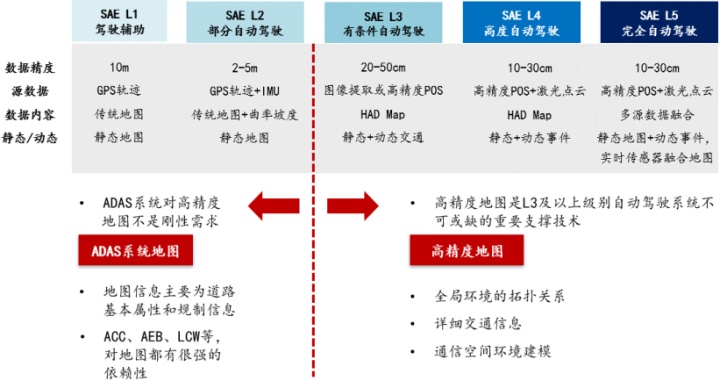
高精度地圖對高等級自動駕駛系統(tǒng)而言不可或缺
從目前競爭格局看,高精度地圖領域呈現(xiàn)四維圖新(騰訊產(chǎn)業(yè)基金為公司第二大股東,截至2021年3月底,騰訊產(chǎn)業(yè)基金持股5%)、高德(阿里巴巴全資孫公司)、百度三足鼎立態(tài)勢。百度為國內(nèi)最早開展高精度地圖研究的公司,2013年啟動無人車項目研發(fā),高德?lián)碛邪⒗锇桶腿χС?,進展較快,四維圖新為國內(nèi)老牌圖商。

三大圖商的高精度地圖訂單梳理
數(shù)據(jù)來源:四維圖新公司公告(參見:2019年2月13日《四維圖新:關于與寶馬汽車公司簽署自動駕駛地圖許可協(xié)議的公告》及2019年11月20日《四維圖新:關于華為采購公司高精度地圖數(shù)據(jù)產(chǎn)品和服務的公告》),汽車之家,蓋世汽車,廣發(fā)證券發(fā)展研究中心



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價開始從“電池單體性能指標”轉(zhuǎn)
2026-03-04 11:38
