




 廣告
廣告





















































一文讀懂自動駕駛數(shù)據(jù)閉環(huán)
2021-09-21 18:17:01· 來源:智駕最前沿

2)地圖定位:車輛定位中基于語義地圖的方法,在語義目標提取也是采用深度學習模型,甚至語義地圖的制作也是如此,目前感興趣的地圖更新(或者在線地圖)多半需要檢測語義目標。定位的后端也可以是數(shù)據(jù)驅(qū)動的解決,包括全局定位和相對定位,最近SLAM和深度學習的結(jié)合工作也如火如荼進行。
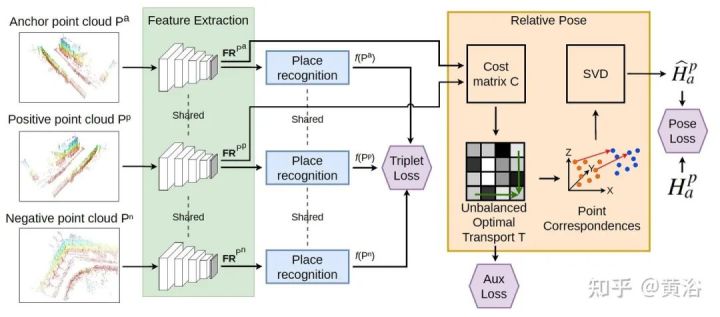
“LCDNet: Deep Loop Closure Detection andPoint Cloud Registration for LiDAR SLAM”

“DeepSFM: Structure From Motion Via DeepBundle Adjustment”

“HDMapNet: An online HD Map Construction and evaluation framework”
3)預測:障礙物的軌跡預測現(xiàn)在已經(jīng)是自動駕駛發(fā)展至今的重點之一,現(xiàn)在重要性可以說是高于感知。如何建模智體行為、如何建模智體之間的交互和軌跡預測的動作多模態(tài)性,自然最佳方式是采用數(shù)據(jù)來訓練。另外,感知-預測結(jié)合解決也是需要大量數(shù)據(jù)訓練去得到合理的模型。

“Learning Lane Graph Representations for Motion Forecasting”
“PnPNet: End-to-End Perception and Prediction with Tracking in the Loop”
“Deep Multi-Task Learning for Joint Localization, Perception, and Prediction”

“TNT: Target-driven Trajectory Prediction”



 廣告
廣告 編輯推薦




最新資訊
-
開年豪擲1.8億搶用戶,又一車企加入“價格
2026-03-04 16:05
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
