




 廣告
廣告





















































首頁(yè) > 汽車行業(yè)資訊 > 正文
重塑安全:自動(dòng)駕駛系統(tǒng)的聯(lián)合方法
2022-01-19 18:10:43· 來源:全球智能汽車供應(yīng)鏈

作者:陌世來源:編譯自 博世介紹梅賽德斯-奔馳和博世是汽車行業(yè)的先驅(qū),尤其是在汽車安全方面。兩家公司在這一領(lǐng)域開展了深入的研究,并將許多創(chuàng)新的安全系統(tǒng)和
作者:陌世
來源:編譯自 博世
介紹
梅賽德斯-奔馳和博世是汽車行業(yè)的先驅(qū),尤其是在汽車安全方面。兩家公司在這一領(lǐng)域開展了深入的研究,并將許多創(chuàng)新的安全系統(tǒng)和技術(shù)推向市場(chǎng)。
自1886年梅賽德斯-奔馳(Mercedes-Benz)發(fā)明汽車以來,自豪地佩戴著其三顆星的汽車一直在制定汽車安全標(biāo)準(zhǔn)。開創(chuàng)性的梅賽德斯-奔馳“智能駕駛”輔助系統(tǒng)正變得越來越網(wǎng)絡(luò)化,因?yàn)樗鼈冊(cè)谌詣?dòng)駕駛道路上樹立了新的里程碑。今天,梅賽德斯-奔馳和博世攜手努力,繼續(xù)完善和推進(jìn)道路交通安全領(lǐng)域。
梅賽德斯-奔馳(Mercedes-Benz)正在將能夠自動(dòng)駕駛的車輛引入城市街道,旨在提高道路安全,改善城市交通流量,并為未來的交通提供重要的組成部分。梅賽德斯-奔馳和博世并不是這項(xiàng)重要工作的新手。1986年,兩家公司首次開始開發(fā)和分享他們?cè)谧詣?dòng)駕駛方面的專業(yè)知識(shí),并與他們的“普羅米修斯”聯(lián)合項(xiàng)目合作,證明了這項(xiàng)技術(shù)的巨大潛力。
從創(chuàng)新到行業(yè)基準(zhǔn)
許多今天被視為理所當(dāng)然的創(chuàng)新安全技術(shù)是與博世一起開發(fā)的,并首次引入梅賽德斯-奔馳車輛。例子包括:
?1978年S-Class中引入的防抱死制動(dòng)系統(tǒng)(ABS)
?1981年S-Class中引入的安全氣囊
?電子穩(wěn)定程序ESP®(通稱為“電子穩(wěn)定控制”),在1995年S級(jí)Coupé中引入。
這類里程碑式的成功繼續(xù)鼓勵(lì)兩家公司努力推進(jìn)自動(dòng)化駕駛,以實(shí)現(xiàn)提高整體汽車安全性的共同目標(biāo)。
梅賽德斯-奔馳(Mercedes-Benz)和博世(Bosch)攜手致力于未來的移動(dòng)性:無人駕駛車輛
我們的下一個(gè)目標(biāo)是交付生產(chǎn)就緒的車輛,這些車輛能夠在規(guī)定的區(qū)域內(nèi)無人駕駛運(yùn)行,也被稱為“操作設(shè)計(jì)領(lǐng)域”,例如城市的市中心區(qū)。梅賽德斯-奔馳和博世于2017年聯(lián)手,通過簽訂開發(fā)協(xié)議,將世界領(lǐng)先的高端汽車制造商之一與世界最大汽車供應(yīng)商之一的龐大系統(tǒng)和硬件專業(yè)知識(shí)結(jié)合在一起,實(shí)現(xiàn)高度自動(dòng)化,在下一個(gè)十年開始前,可在城市道路上行駛的無人駕駛(SAE 4級(jí))車輛。我們目前正在開發(fā)高度復(fù)雜的軟件和算法,使車輛在復(fù)雜的城市交通中無需人工駕駛即可運(yùn)行,并在必要時(shí)通過將車輛移動(dòng)到最低風(fēng)險(xiǎn)狀態(tài)(低風(fēng)險(xiǎn)運(yùn)行模式)自動(dòng)管理故障和問題。
未來的共同流動(dòng)
通過在城市環(huán)境中引入無人駕駛車輛,梅賽德斯-奔馳旨在提高道路安全,改善城市交通流量,并為未來的綜合和自動(dòng)化交通系統(tǒng)提供重要的組成部分。除其他外,這項(xiàng)技術(shù)將增強(qiáng)汽車共享的吸引力。它將允許人們盡可能充分利用他們?cè)谲嚿系臅r(shí)間,開辟新的移動(dòng)機(jī)會(huì),并為在城市環(huán)境中旅行的客戶(包括那些城市)擴(kuò)展交通選擇。
由于殘疾,目前無法駕駛。這里的想法是,在指定區(qū)域內(nèi),客戶可以通過智能手機(jī)呼叫梅賽德斯-奔馳自動(dòng)車輛。然后,車輛將前往用戶的接送地點(diǎn),并將該人員運(yùn)送至其指定目的地。
自動(dòng)駕駛之路:五大洲的智能世界駕駛
“無人駕駛汽車”的愿景吸引著越來越多的人。然而,所有車輛都要經(jīng)過數(shù)年的時(shí)間才能具備自動(dòng)化駕駛技術(shù)水平,使其在任何地方都能以無人駕駛模式運(yùn)行。今天已經(jīng)在路上的先進(jìn)援助系統(tǒng)證明了這項(xiàng)技術(shù)已經(jīng)達(dá)到了先進(jìn)的階段。但在今天的車輛和無人駕駛車輛更高的自動(dòng)駕駛功能之間仍然存在一些缺失的聯(lián)系。
梅賽德斯-奔馳正在不斷測(cè)試和改進(jìn)其自動(dòng)駕駛技術(shù)。憑借智能世界駕駛巡回賽,梅賽德斯-奔馳在2017年9月至2018年1月期間,在五大洲的教育之旅中派出了一輛配備自動(dòng)駕駛技術(shù)的測(cè)試車。在這五個(gè)月里,在各種各樣的交通條件下,在真實(shí)道路上進(jìn)行自動(dòng)試駕,獲得了寶貴的經(jīng)驗(yàn)。
當(dāng)仔細(xì)觀察不同國(guó)家和文化的交通狀況時(shí),明顯的差異和特點(diǎn)就會(huì)顯現(xiàn)出來。為了使自動(dòng)駕駛技術(shù)能夠適應(yīng)這些特性,必須在現(xiàn)實(shí)世界的交通中“體驗(yàn)”這些特性。戴姆勒管理委員會(huì)負(fù)責(zé)集團(tuán)研究和梅賽德斯-奔馳汽車開發(fā)的成員Ola K?llenius解釋說:“高度復(fù)雜交通狀況的采集、處理和解釋是安全自動(dòng)化和無人駕駛車輛的關(guān)鍵。”?!斑@些過程在密集的城市交通中尤其復(fù)雜。因此,我們?cè)谥饕鞘忻刻彀l(fā)生的駕駛情況下,非常謹(jǐn)慎地測(cè)試我們的自動(dòng)駕駛功能?!?/span>
智能世界駕駛考試項(xiàng)目還指出了自動(dòng)駕駛法律框架和相關(guān)基礎(chǔ)設(shè)施的國(guó)際協(xié)調(diào)對(duì)于自動(dòng)車輛成功進(jìn)入市場(chǎng)的重要性。因此,梅賽德斯-奔馳和博世繼續(xù)與政府和行業(yè)實(shí)體合作,促進(jìn)與自動(dòng)駕駛及其相關(guān)車輛技術(shù)相關(guān)的法律、法規(guī)和標(biāo)準(zhǔn)的國(guó)際協(xié)調(diào)。
美國(guó)
智能世界驅(qū)動(dòng)的最后階段在加利福尼亞州和內(nèi)華達(dá)州進(jìn)行。在大洛杉磯的試駕中,以及從那里到拉斯維加斯的消費(fèi)電子展(CES),測(cè)試車輛必須在密集的城市交通和高速公路上證明自己。在這個(gè)過程中,它熟悉了美國(guó)道路交通的特點(diǎn)。
例如,在美國(guó),校車是道路使用者的一個(gè)特殊類別。當(dāng)他們停車并打開警示燈時(shí),附近的所有車輛都必須停車。美國(guó)的限速標(biāo)志也絕對(duì)獨(dú)一無二。它們的形狀和大小與歐洲、澳大利亞、亞洲和加拿大的限速標(biāo)志完全不同。美國(guó)也有高載客量車輛(HOV)車道,以及由凸起的塑料點(diǎn)(Botts’dots)制成的道路標(biāo)記。在某些情況下,美國(guó)司機(jī)也可以從右邊超車。所有這些因素都對(duì)測(cè)試車輛的傳感器系統(tǒng)和算法提出了很高的要求。
南非
南非的交通帶來了一些非常不尋常的挑戰(zhàn),例如該國(guó)特有的交通標(biāo)志、道路上的野生動(dòng)物以及意外穿越道路的行人。在西開普省和開普敦的自動(dòng)試駕期間,測(cè)試車輛應(yīng)對(duì)了南非的這些挑戰(zhàn)。主要研究了行人檢測(cè)系統(tǒng)。在南非的城市和鄉(xiāng)村有很多行人。他們中的一些人在不尋常的交通狀況下在道路上行走或穿過街道。在城鎮(zhèn)和村莊以外的國(guó)道上,甚至在主要公路上,司機(jī)必須時(shí)刻注意穿過道路的行人。這對(duì)自動(dòng)和自動(dòng)車輛的傳感器系統(tǒng)提出了相應(yīng)的高要求。攝像機(jī)和雷達(dá)系統(tǒng)必須識(shí)別行人并正確解釋他們的動(dòng)作,以便車輛在必要時(shí)能夠在毫秒內(nèi)做出反應(yīng)。
澳大利亞
駕駛員從左車道右轉(zhuǎn),閃動(dòng)限速標(biāo)志,袋鼠在道路上跳躍——在智能世界駕駛的第三階段,測(cè)試車輛必須掌握在鄉(xiāng)村道路、高速公路和城市交通上的自動(dòng)試駕,并有全新的具體要求。這條路線從悉尼開始,繼續(xù)經(jīng)過堪培拉和阿爾伯里,最后進(jìn)入墨爾本的城市交通。試駕的一個(gè)重點(diǎn)是驗(yàn)證此處的數(shù)字地圖數(shù)據(jù)。該系統(tǒng)還必須識(shí)別特定國(guó)家的交通標(biāo)志。
此外,工程師們還測(cè)試了一種新的照明技術(shù)。試驗(yàn)車輛配備了創(chuàng)新的數(shù)字照明系統(tǒng)。在前照燈原型內(nèi)部,每個(gè)前照燈包含超過一百萬像素的芯片提供高清質(zhì)量的防眩目連續(xù)遠(yuǎn)光。除此之外,數(shù)字光可以將光跡投射到道路上,以便與周圍環(huán)境進(jìn)行通信。美國(guó)-中國(guó)-澳大利亞-南非-歐洲駕駛員從左車道右轉(zhuǎn),閃動(dòng)限速標(biāo)志,袋鼠在道路上跳躍-在智能世界駕駛的第三階段,測(cè)試車輛必須掌握在鄉(xiāng)村道路、高速公路和公路上的自動(dòng)試駕,并對(duì)城市交通提出了全新的一套具體要求。這條路線從悉尼開始,繼續(xù)經(jīng)過堪培拉和阿爾伯里,最后進(jìn)入墨爾本的城市交通。試駕的一個(gè)重點(diǎn)是驗(yàn)證此處的數(shù)字地圖數(shù)據(jù)。該系統(tǒng)還必須識(shí)別特定國(guó)家的交通標(biāo)志。介紹
中國(guó)
百萬人口的城市。無數(shù)的人、自行車、摩托車和越來越多的汽車——以及中國(guó)交通的顯著特征。這里的試駕重點(diǎn)是在各種各樣的道路使用者的密集交通中的駕駛行為。除了中文字體的交通標(biāo)志外,還有一些車道標(biāo)志,它們根據(jù)上下文的不同而具有不同的含義。例如,在中國(guó)的高速公路上也可以找到用來表示世界各地人行橫道的寬白線,但它們表示車輛之間的最小距離。自動(dòng)和自動(dòng)車輛的傳感器系統(tǒng)必須識(shí)別并正確解釋這些特征。這也適用于速度限制,不同車道和七車道交叉口的速度限制可能不同,在高峰時(shí)間,數(shù)十輛自行車和行人同時(shí)穿過這些交叉口
梅賽德斯-奔馳的安全遺產(chǎn)
梅賽德斯-奔馳(Mercedes-Benz)可以自豪地指出,數(shù)十年來在汽車安全系統(tǒng)方面的創(chuàng)新為安全車輛確立了標(biāo)準(zhǔn),因?yàn)樗^續(xù)在主動(dòng)安全系統(tǒng)和乘員保護(hù)系統(tǒng)方面設(shè)定了進(jìn)步的步伐。這些創(chuàng)新系統(tǒng)中的許多現(xiàn)已成為整個(gè)行業(yè)車輛上的標(biāo)準(zhǔn)設(shè)備。
下圖顯示了梅賽德斯-奔馳汽車上引入的安全系統(tǒng)的時(shí)間表。它的范圍從1959年引入的壓皺區(qū)一直到目前防止耳鼓破裂并將駕駛員和乘客從側(cè)面碰撞中拉出來的系統(tǒng)。

自動(dòng)化車輛的愿景
梅賽德斯-奔馳(Mercedes-Benz)和博世(Bosch)對(duì)未來有著共同的愿景,即更少的交通事故和更少的壓力。我們正努力通過自動(dòng)化、電氣化和連通性實(shí)現(xiàn)這一愿景。自動(dòng)化是運(yùn)輸業(yè)變革的最大驅(qū)動(dòng)力之一。它有可能使所有人的行動(dòng)更加安全——大多數(shù)事故都是人為失誤造成的——同時(shí)減少交通擁堵。多虧了自動(dòng)駕駛能力,車輛也可以成為私人休養(yǎng)地,讓我們可以隨心所欲地在旅途中利用時(shí)間。
F015概念車,名為“運(yùn)動(dòng)中的豪華”,是一款專門設(shè)計(jì)的研究車輛,旨在展示未來梅賽德斯-奔馳自動(dòng)化車輛的外觀。
計(jì)劃中的梅賽德斯-奔馳自動(dòng)化車輛將配備集成在數(shù)字基礎(chǔ)設(shè)施內(nèi)的系統(tǒng),該基礎(chǔ)設(shè)施能夠連接到車隊(duì)運(yùn)營(yíng)中心、公共機(jī)構(gòu)的數(shù)據(jù)源(例如,來自當(dāng)?shù)氐缆樊?dāng)局的交通信號(hào)數(shù)據(jù))和其他車輛的數(shù)據(jù)。它還將有一個(gè)與云的接口,在那里可以訪問狀態(tài)報(bào)告以及相關(guān)的交通、天氣、事件和施工信息。這些自動(dòng)化車輛功能將有助于優(yōu)化每個(gè)客戶的旅程規(guī)劃。
總體設(shè)計(jì)方法
安全性指導(dǎo)梅賽德斯-奔馳自動(dòng)化車輛從概念到部署的設(shè)計(jì)?;灸繕?biāo)是:
?遵守適用的法律規(guī)則
?僅在規(guī)定的操作設(shè)計(jì)范圍內(nèi)駕駛
?防守性駕駛
?必要時(shí)自動(dòng)實(shí)現(xiàn)最低風(fēng)險(xiǎn)條件
安全保證方面
自動(dòng)化車輛的一個(gè)重要目標(biāo)是減少事故發(fā)生的可能性,并通過像防御性和細(xì)心的駕駛員一樣操作來減輕乘客和其他道路使用者的風(fēng)險(xiǎn),該駕駛員始終監(jiān)控駕駛環(huán)境,并對(duì)不斷變化的條件作出適當(dāng)和安全的反應(yīng)。為此,將系統(tǒng)安全納入車輛的設(shè)計(jì)、開發(fā)、測(cè)試和驗(yàn)證中,重點(diǎn)關(guān)注以下四個(gè)關(guān)鍵安全保證方面:
系統(tǒng)安全
功能安全包括識(shí)別和規(guī)劃因安全關(guān)鍵電氣和電子系統(tǒng)故障而可能發(fā)生的潛在危險(xiǎn)。我們采用已建立的國(guó)際工藝標(biāo)準(zhǔn)(如ISO 26262),以幫助我們?cè)谠O(shè)計(jì)和開發(fā)過程中查明并減少潛在危險(xiǎn)。此外,我們考慮方面的“預(yù)期功能的安全性”(SOTIF),它描述了一種方法識(shí)別功能不足,在系統(tǒng)中設(shè)計(jì),并得出對(duì)策。通過優(yōu)化設(shè)計(jì)和/或提供冗余部件或系統(tǒng),我們可以最好地確保自動(dòng)化車輛的基本功能保持運(yùn)行,即使發(fā)生故障。
準(zhǔn)確可靠的環(huán)境傳感
自動(dòng)化車輛最重要的任務(wù)之一是準(zhǔn)確可靠地檢測(cè)駕駛環(huán)境中的相關(guān)和潛在危險(xiǎn)物體和事件。這包括但不限于其他道路使用者、異物、道路上的動(dòng)物、路面標(biāo)線以及標(biāo)志和信號(hào)。它進(jìn)一步擴(kuò)展到各種各樣的事件,如緊急車輛、施工區(qū)和需要采取特殊措施的交通事故場(chǎng)景?;趦杉夜驹隈{駛員輔助系統(tǒng)方面的豐富經(jīng)驗(yàn),我們正在開發(fā)一套強(qiáng)大、全面和集成的傳感器。
安全自動(dòng)車輛行為
當(dāng)車輛傳感器檢測(cè)到環(huán)境中的物體和事件時(shí),車輛必須對(duì)其做出適當(dāng)反應(yīng)。因此,設(shè)計(jì)過程采用了以安全為導(dǎo)向的防御性駕駛風(fēng)格,旨在避免與其他道路使用者發(fā)生過失碰撞,同時(shí)避免或緩解他人造成的碰撞。
學(xué)習(xí)和持續(xù)改進(jìn)
梅賽德斯-奔馳在現(xiàn)實(shí)世界中不斷監(jiān)控和分析其車輛的系統(tǒng)性能,以便不斷改進(jìn)。這包括對(duì)現(xiàn)場(chǎng)數(shù)據(jù)以及客戶反饋和診斷數(shù)據(jù)的詳細(xì)分析。
安全過程
安全自動(dòng)化車輛的開發(fā)要求制造商及其供應(yīng)商實(shí)施特定流程,以指導(dǎo)自動(dòng)化車輛設(shè)計(jì)的各個(gè)方面,包括硬件和軟件。梅賽德斯-奔馳(作為一家汽車制造商)和博世(作為一家供應(yīng)商)在駕駛輔助系統(tǒng)開發(fā)中使用這些流程、工具和方法方面擁有豐富的經(jīng)驗(yàn)。
為了解決開發(fā)過程中的系統(tǒng)安全問題,我們使用標(biāo)準(zhǔn)化的工具和方法,例如
?ISO 26262-“道路車輛-功能安全”:廣泛的安全實(shí)施過程標(biāo)準(zhǔn),包括“危險(xiǎn)分析和風(fēng)險(xiǎn)評(píng)估”,這是一種評(píng)估故障行為造成的風(fēng)險(xiǎn)的方法。ISO 26262還規(guī)定了評(píng)估和處理每種已識(shí)別危險(xiǎn)的方法,以消除或?qū)嵸|(zhì)上減輕其可能造成的危害。本標(biāo)準(zhǔn)還規(guī)定了驗(yàn)證合規(guī)性的獨(dú)立審計(jì)程序。梅賽德斯-奔馳(Mercedes-Benz)的母公司戴姆勒公司(Daimler AG)是ISO 26262的原始驅(qū)動(dòng)者,該標(biāo)準(zhǔn)根據(jù)通用行業(yè)標(biāo)準(zhǔn)IEC 61508—“電氣/電子/可編程電子安全相關(guān)系統(tǒng)的功能安全”進(jìn)行了修改
演繹分析:一種自上而下的方法,用于識(shí)別危害及其根本原因之間的因果鏈。故障樹分析(FTA)廣泛應(yīng)用于所有行業(yè)。
?歸納分析:汽車行業(yè)廣泛使用的一種方法是故障模式和影響分析(FMEA),它有助于在系統(tǒng)設(shè)計(jì)期間識(shí)別可能的危險(xiǎn)。
?迭代識(shí)別自動(dòng)駕駛系統(tǒng)的功能不足并得出應(yīng)對(duì)措施以解決由此產(chǎn)生的風(fēng)險(xiǎn)(預(yù)期功能的安全性(SOTIF))的過程。
車輛結(jié)構(gòu)
因?yàn)榘踩珜?duì)于自動(dòng)化車輛來說至關(guān)重要,所以安全問題是車輛架構(gòu)和開發(fā)過程的關(guān)鍵。為此,采用了相關(guān)行業(yè)標(biāo)準(zhǔn),如ISO/IEC 15504-“信息技術(shù)-過程評(píng)估”,軟件驗(yàn)證方法,以及安全標(biāo)準(zhǔn),如ISO 26262“道路車輛-功能安全”。這些行業(yè)標(biāo)準(zhǔn)為開發(fā)和生產(chǎn)更安全的產(chǎn)品提供了有價(jià)值的指導(dǎo)方針,并在開發(fā)過程中嵌入了可追溯性和問責(zé)制??傮w而言,該開發(fā)過程提供:
1.自動(dòng)車輛設(shè)計(jì)在何處以及在何種條件下(如位置、天氣、時(shí)間等)運(yùn)行的明確規(guī)范。在該操作設(shè)計(jì)領(lǐng)域內(nèi),收集和分析自動(dòng)化車輛的需求,包括其按照相關(guān)安全和交通法律法規(guī)運(yùn)行的能力。
2.分析與自動(dòng)車輛在其操作設(shè)計(jì)領(lǐng)域內(nèi)的安全性能相關(guān)的用例(真實(shí)情況)。從這些用例中可以導(dǎo)出所需的功能。常見用例的示例有“通過4路停車”或“在人行橫道停車并給予行人優(yōu)先通行權(quán)”每個(gè)用例都需要車輛的特定功能、能力和響應(yīng)。這些用例之間的描述和交互最終決定了自動(dòng)化車輛的體系結(jié)構(gòu)。
3.可在系統(tǒng)和組件級(jí)測(cè)試的定義要求,例如,雷達(dá)傳感器或傳感器融合算法的要求。然后,這些可測(cè)試需求的集合可以輸入到各種用例的設(shè)計(jì)和功能中。
4.系統(tǒng)架構(gòu),包括最終組件規(guī)范“網(wǎng)絡(luò)和電網(wǎng)設(shè)計(jì)”,最終滿足車輛的集成要求。
該系統(tǒng)設(shè)計(jì)策略有助于在各個(gè)性能級(jí)別(從單個(gè)部件和子系統(tǒng)到整個(gè)車輛)對(duì)安全保證采取全面的測(cè)試、驗(yàn)證和確認(rèn)方法。
當(dāng)然,車輛還需要具有容錯(cuò)能力,即使系統(tǒng)出現(xiàn)錯(cuò)誤,也能正常工作。為此,我們?cè)谖覀兊南到y(tǒng)中設(shè)計(jì)了冗余,使車輛在運(yùn)行中具有魯棒性,并允許車輛在需要時(shí)達(dá)到最低風(fēng)險(xiǎn)條件。
操作設(shè)計(jì)領(lǐng)域
運(yùn)行設(shè)計(jì)領(lǐng)域描述了自動(dòng)車輛設(shè)計(jì)運(yùn)行的精確條件,包括速度、范圍、時(shí)間、天氣條件、是否存在某些類型的道路基礎(chǔ)設(shè)施,以及自動(dòng)車輛設(shè)計(jì)運(yùn)行的地理區(qū)域。我們的自動(dòng)化車輛是“地理圍欄”,這意味著,除了其他限制外,其操作設(shè)計(jì)領(lǐng)域還通過精確的高清晰度地圖進(jìn)一步定義,該地圖嚴(yán)格定義了車輛的規(guī)定操作區(qū)域;根據(jù)設(shè)計(jì),車輛不能離開該區(qū)域。梅賽德斯-奔馳通過分析交通和基礎(chǔ)設(shè)施、照明、標(biāo)志和道路類型等環(huán)境條件以及適用的法律要求,確定其自動(dòng)化車輛在特定目標(biāo)城市的運(yùn)營(yíng)設(shè)計(jì)領(lǐng)域。
在該地理圍欄區(qū)域內(nèi)的車隊(duì)運(yùn)營(yíng)中心計(jì)算給定騎乘請(qǐng)求的合適路線。它還可以考慮實(shí)時(shí)路況、交通信息和天氣等信息,以確保在處理調(diào)度命令和命令自動(dòng)車輛前往指定位置之前,自動(dòng)車輛可以執(zhí)行駕駛分配。
惡劣天氣條件(如暴雨或暴風(fēng)雪)可能需要臨時(shí)暫停車輛的移動(dòng)服務(wù),因?yàn)樗鼈儤?gòu)成了操作設(shè)計(jì)領(lǐng)域的限制。在派遣自動(dòng)車輛接送乘客或重新安置乘客之前,應(yīng)密切監(jiān)控此類情況。類似地,車輛傳感器在運(yùn)行期間由感知系統(tǒng)持續(xù)監(jiān)控,以檢測(cè)環(huán)境條件是否降低了車輛傳感器感知其運(yùn)行環(huán)境的能力。如果環(huán)境條件惡化到自動(dòng)車輛無法在給定行程中準(zhǔn)確可靠地感知其運(yùn)行環(huán)境的程度,自動(dòng)車輛將自動(dòng)過渡到最低風(fēng)險(xiǎn)狀態(tài)。例如,這可能包括打開危險(xiǎn)閃光燈、臨時(shí)停車和/或向車隊(duì)運(yùn)營(yíng)中心尋求協(xié)助等措施。
自動(dòng)車輛移動(dòng)服務(wù)的一個(gè)重要目標(biāo)是不斷擴(kuò)展車隊(duì)車輛的操作設(shè)計(jì)領(lǐng)域。梅賽德斯的自動(dòng)車輛移動(dòng)服務(wù)的最終目標(biāo)是在一天中的任何時(shí)間、盡可能多的地理區(qū)域和環(huán)境條件下運(yùn)行。
對(duì)象和事件檢測(cè)與響應(yīng)
自動(dòng)車輛的感知系統(tǒng)、環(huán)境建模以及行為規(guī)劃和預(yù)測(cè)活動(dòng)通常由通用術(shù)語“對(duì)象和事件檢測(cè)與響應(yīng)”(OEDR)定義。該術(shù)語與用于描述人類安全駕駛所依賴的行為的術(shù)語相同。
我們通過分析車輛在交通中遇到的相關(guān)場(chǎng)景來設(shè)計(jì)自動(dòng)車輛的OEDR功能。這包括常見和罕見的情況。車輛處理任何給定交通狀況的方式取決于適用的交通法規(guī)以及安全和防御性駕駛原則??煽康腛EDR性能是由設(shè)計(jì)良好的傳感器、執(zhí)行器和計(jì)算資源系統(tǒng)實(shí)現(xiàn)的。冗余的應(yīng)用方式應(yīng)確保在發(fā)生故障時(shí),車輛仍能做出適當(dāng)?shù)捻憫?yīng)。下文將更詳細(xì)地描述負(fù)責(zé)OEDR的各種組件。
環(huán)境感知
環(huán)境感知系統(tǒng)由傳感器和感知算法組成。環(huán)境感知系統(tǒng)將原始傳感器數(shù)據(jù)轉(zhuǎn)換為可識(shí)別的對(duì)象,對(duì)自動(dòng)車輛在公共道路上運(yùn)行時(shí)的可靠性能至關(guān)重要。梅賽德斯-奔馳(Mercedes-Benz)和博世(Bosch)進(jìn)行了廣泛的設(shè)計(jì)工作,以實(shí)現(xiàn)穩(wěn)健的性能。
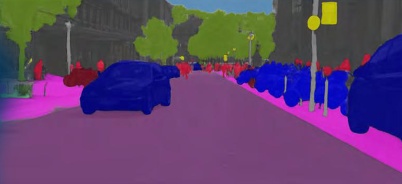
360度環(huán)境感知與環(huán)繞視覺
下面您可以看到我們的環(huán)繞視覺攝像頭拍攝的場(chǎng)景。我們的算法能夠?qū)?chǎng)景中的對(duì)象及其周圍環(huán)境進(jìn)行分類,例如汽車和摩托車以深藍(lán)色突出顯示,行人以紅色突出顯示,道路以栗色突出顯示。
傳感器安裝與感知系統(tǒng)的設(shè)計(jì)
在設(shè)計(jì)自動(dòng)化車輛的傳感器設(shè)置和環(huán)境感知算法時(shí),梅賽德斯-奔馳和博世不僅解決了日常操作問題,例如留在行車道上,觀察交通信號(hào)燈和標(biāo)志,但我們關(guān)注大量所謂的“角落”用例,這些場(chǎng)景對(duì)于自動(dòng)化車輛來說尤其具有挑戰(zhàn)性。盡管轉(zhuǎn)角用例可能相對(duì)較少出現(xiàn),但自動(dòng)化車輛必須能夠可靠地處理它們。
例如,傳感器設(shè)置被設(shè)計(jì)為考慮道路碎片和丟失貨物的拐角使用情況。2011-2014年間,美國(guó)有超過200000起警察報(bào)告的車禍發(fā)生在這個(gè)角落使用案例中,共造成約39000人受傷,500人死亡。為了可靠地檢測(cè)道路碎片,我們使用“深度學(xué)習(xí)”技術(shù)來解釋來自車內(nèi)攝像機(jī)和光探測(cè)與測(cè)距(lidar)傳感器的數(shù)據(jù)。為此,我們收集了數(shù)萬張道路碎片和丟失貨物的示例圖像。此外,我們將該數(shù)據(jù)集的一部分向汽車行業(yè)的其他部門公開,以促進(jìn)競(jìng)爭(zhēng)前信息的共享,從而有助于提高未來所有自動(dòng)化車輛的安全性。
深度學(xué)習(xí)算法使人工智能和自動(dòng)駕駛系統(tǒng)的機(jī)器學(xué)習(xí)領(lǐng)域取得了巨大進(jìn)展。這項(xiàng)技術(shù)大大提高了感知能力,現(xiàn)在已成為我們感知和感知系統(tǒng)的組成部分。
下面邊的圖像顯示了深度學(xué)習(xí)算法生成的結(jié)果。圖像中所謂的“語義信息”將對(duì)象分類為道路、樹木、行人等。在這些示例圖中,車輛顯示為藍(lán)色,行人顯示為紅色,道路顯示為紫色,交通標(biāo)志顯示為黃色。深度學(xué)習(xí)系統(tǒng)將對(duì)象和基礎(chǔ)設(shè)施的所有相關(guān)類別分開。這包括自動(dòng)車輛感知系統(tǒng)部分阻擋的物體和物品,例如被其他車輛部分隱藏的行人。
有監(jiān)督的深度學(xué)習(xí)算法需要大量帶注釋的數(shù)據(jù)才能產(chǎn)生這樣的結(jié)果。一個(gè)大型數(shù)據(jù)庫(kù)用于覆蓋多種天氣和照明條件,使自動(dòng)化車輛能夠在各種環(huán)境和照明條件下工作。
傳感器組
自動(dòng)化車輛的定制傳感器設(shè)置包括雷達(dá)、激光雷達(dá)、攝像頭和超聲波傳感器以及麥克風(fēng)。此傳感器設(shè)置可在車輛周圍提供360度視野。不同的傳感器在其視野范圍內(nèi)重疊,以實(shí)現(xiàn)更強(qiáng)大的感知能力,并使車輛能夠處理所有相關(guān)用例。
每種傳感器技術(shù)都為整個(gè)感知系統(tǒng)帶來了特定的優(yōu)勢(shì),以完成自動(dòng)化車輛所需的廣泛檢測(cè)任務(wù)。設(shè)計(jì)傳感器裝置的挑戰(zhàn)在于將這些傳感概念結(jié)合在一起,使各種技術(shù)相互補(bǔ)充,以達(dá)到所需的感知能力。這稱為“傳感器融合”(見下一節(jié))。此外,傳感器設(shè)置及其集成到E/E體系結(jié)構(gòu)中的設(shè)計(jì)使自動(dòng)化車輛在系統(tǒng)發(fā)生故障的不太可能的情況下仍然能夠達(dá)到最小的風(fēng)險(xiǎn)條件。
傳感器融合、環(huán)境建模和行為規(guī)劃
在復(fù)雜的城市環(huán)境中安全平穩(wěn)地駕駛需要對(duì)實(shí)時(shí)交通狀況的詳細(xì)和持續(xù)的了解,以及預(yù)測(cè)未來交通發(fā)展的能力。這對(duì)于自動(dòng)車輛安全、適當(dāng)?shù)貓?zhí)行所有駕駛操作是必要的,例如跟隨車輛、改變車道、讓行、合并或?qū)Ш睫D(zhuǎn)彎和交叉口。這些功能由傳感器融合、環(huán)境建模和行為規(guī)劃模塊執(zhí)行。
在傳感器融合模塊中,輸入來自所有自動(dòng)化車輛的傳感器,并通過復(fù)雜的算法,組合成直接環(huán)境的準(zhǔn)確和全面表示。這就是車輛“看到”和解釋它看到的東西的方式。環(huán)境表示包括移動(dòng)對(duì)象,如其他車輛、行人、自行車、動(dòng)物等,以及非移動(dòng)對(duì)象,如停放的汽車、路緣、交通燈等。
然后,環(huán)境建模從傳感器融合中獲取環(huán)境表示,并將其與其他信息源相結(jié)合,從而創(chuàng)建自動(dòng)化車輛附近交通狀況的更全面圖片。它結(jié)合了三個(gè)主要輸入:
?傳感器融合系統(tǒng)提供的操作環(huán)境的綜合表示;
?高清數(shù)字地圖,顯示自動(dòng)車輛和其他車輛及物體的位置;
?自動(dòng)車輛的“駕駛?cè)蝿?wù)”已經(jīng)分配
環(huán)境建模模塊從傳感器融合系統(tǒng)獲取信息,并使用有關(guān)實(shí)時(shí)交通狀況的其他上下文知識(shí)對(duì)其進(jìn)行增強(qiáng)和增強(qiáng)。然后,它可以在高清數(shù)字地圖中確定物體相對(duì)于自動(dòng)車輛的位置,并評(píng)估未來可能的移動(dòng)。換句話說,系統(tǒng)預(yù)測(cè)和預(yù)測(cè)道路上的其他對(duì)象可能會(huì)做什么。
自動(dòng)化車輛實(shí)時(shí)操作環(huán)境中每個(gè)對(duì)象的行為可以基于各種因素進(jìn)行預(yù)測(cè)。這些信息包括道路網(wǎng)絡(luò)拓?fù)浜吞囟ㄓ谏舷挛牡恼Z義信息,如對(duì)象和基礎(chǔ)設(shè)施的位置、類型和位置以及適用的交通規(guī)則。它還可以考慮不同對(duì)象之間以及這些對(duì)象與自動(dòng)車輛之間的推斷關(guān)系。環(huán)境模型提供了即時(shí)運(yùn)行環(huán)境的不斷更新、實(shí)時(shí)、全面的表示,自動(dòng)化車輛需要該環(huán)境才能在交通中安全運(yùn)行。
行為規(guī)劃模塊規(guī)劃最理想、可行和適當(dāng)?shù)鸟{駛操作順序,以實(shí)現(xiàn)自動(dòng)化車輛的路線目標(biāo)。該模塊將來自傳感器融合和環(huán)境模塊的解釋性和預(yù)測(cè)性信息與機(jī)動(dòng)規(guī)劃緊密集成,以使自動(dòng)化車輛能夠?qū)崟r(shí)、持續(xù)、靈活地適應(yīng)不斷變化的情況。我們的目標(biāo)是以類似于人類駕駛員在合并點(diǎn)和十字路口的方式與其他車輛進(jìn)行協(xié)商。其行為可能會(huì)如何影響周圍車輛和行人的行為也被考慮在內(nèi)。
軟件的運(yùn)動(dòng)規(guī)劃組件指導(dǎo)自動(dòng)車輛在交通中的運(yùn)動(dòng)。根據(jù)詳細(xì)的碰撞風(fēng)險(xiǎn)評(píng)估和可行性評(píng)估,驗(yàn)證自動(dòng)車輛的軌跡。運(yùn)動(dòng)規(guī)劃器還采用碰撞避免和緩解策略,以快速響應(yīng)不可預(yù)測(cè)的事件和突然出現(xiàn)的對(duì)象。
回退和最小風(fēng)險(xiǎn)條件
雖然梅賽德斯-奔馳和博世強(qiáng)調(diào)提供最高質(zhì)量的產(chǎn)品,但罕見的部件或系統(tǒng)故障或性能下降的可能性仍然存在。因此,我們正在設(shè)計(jì)自動(dòng)化車輛處理此類情況的能力。為了提高安全性和客戶滿意度,自動(dòng)化車輛包括稱為“降級(jí)級(jí)別”的降級(jí)或降級(jí)性能級(jí)別。這些降級(jí)級(jí)別有助于確保車輛在特定故障和主要情況下提供最佳的應(yīng)急性能,并在必要時(shí)達(dá)到最低風(fēng)險(xiǎn)條件。最小風(fēng)險(xiǎn)條件將取決于故障發(fā)生時(shí)的主要條件以及特定故障或性能退化的性質(zhì)。
故障相關(guān)降級(jí)和最小風(fēng)險(xiǎn)條件實(shí)現(xiàn)
性能下降可能會(huì)逐漸發(fā)生,從一路減速到受控停車操作,以達(dá)到最低風(fēng)險(xiǎn)條件。系統(tǒng)響應(yīng)將因場(chǎng)景而異。請(qǐng)注意,如果梅賽德斯-奔馳自動(dòng)車輛檢測(cè)到超出其操作設(shè)計(jì)范圍的情況,其設(shè)計(jì)也將恢復(fù)到模擬風(fēng)險(xiǎn)狀態(tài)。

自動(dòng)車輛驗(yàn)證
所有梅賽德斯-奔馳車輛都具有出色的主動(dòng)和被動(dòng)安全功能。為了實(shí)現(xiàn)自動(dòng)化車輛的同等安全質(zhì)量,驗(yàn)證過程從硬件組件開始,如傳感器(如攝像頭、激光雷達(dá)、雷達(dá)、超聲波傳感器和麥克風(fēng))、計(jì)算模塊和執(zhí)行器。博世作為這些項(xiàng)目的供應(yīng)商,使用硬件測(cè)試臺(tái)、硬件在環(huán)測(cè)試設(shè)置和模擬來驗(yàn)證單個(gè)組件以及組件和子系統(tǒng)組合的性能和魯棒性。在成功執(zhí)行這些測(cè)試以證明在最具挑戰(zhàn)性的環(huán)境和操作條件下的強(qiáng)大功能后,梅賽德斯-奔馳對(duì)安裝在自動(dòng)化車輛上的這些部件和子系統(tǒng)進(jìn)行了進(jìn)一步的嚴(yán)格測(cè)試。測(cè)試在實(shí)驗(yàn)室、試車跑道、模擬虛擬試駕環(huán)境以及公共道路上進(jìn)行。
自動(dòng)化車輛的軟件組件在不同級(jí)別上進(jìn)行測(cè)試和驗(yàn)證。源代碼本身必須滿足嚴(yán)格的質(zhì)量要求,其中許多已經(jīng)在汽車領(lǐng)域標(biāo)準(zhǔn)化。此外,軟件行為和功能的不同方面可以在硬件在環(huán)試驗(yàn)臺(tái)測(cè)試環(huán)境中進(jìn)行測(cè)試,也可以通過基于先前記錄的數(shù)據(jù)運(yùn)行多種場(chǎng)景,在虛擬試駕模擬中進(jìn)行測(cè)試。這些模擬將持續(xù)進(jìn)行,以測(cè)試系統(tǒng)并使其行為具有彈性。這意味著我們正在模擬各種各樣的交通情況,包括許多很少發(fā)生的情況,以改善車輛的行為并使其更加堅(jiān)固。
模擬方法
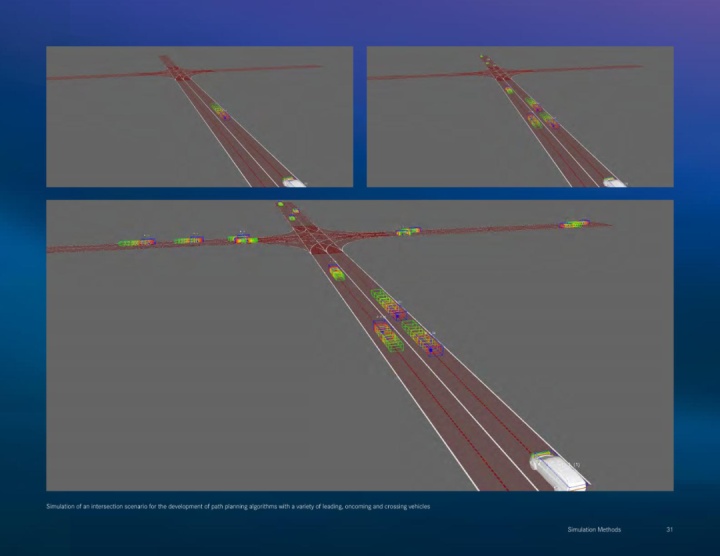
仿真是驗(yàn)證自動(dòng)化車輛運(yùn)行的重要方法。目標(biāo)是通過使用計(jì)算機(jī)生成的環(huán)境輸入數(shù)據(jù),結(jié)合虛擬testdrive軟件生成的數(shù)據(jù),在計(jì)算機(jī)模擬中復(fù)制操作環(huán)境,從而測(cè)試和提高自動(dòng)化車輛的性能。通過改變合成的自動(dòng)車輛輸入數(shù)據(jù)和虛擬試駕環(huán)境中的一個(gè)或兩個(gè),我們能夠?qū)ψ詣?dòng)車輛的性能進(jìn)行詳盡且可重復(fù)的測(cè)試。這包括非常具有挑戰(zhàn)性和危險(xiǎn)的場(chǎng)景和環(huán)境,這些場(chǎng)景和環(huán)境可以比單獨(dú)進(jìn)行軌道和道路測(cè)試更快、更安全、更全面地進(jìn)行測(cè)試。
虛擬試駕模擬的基礎(chǔ)從數(shù)字化駕駛場(chǎng)景開始。每個(gè)都由地圖、交通參與者(包括他們的行為計(jì)劃)、靜態(tài)對(duì)象、附加參數(shù)(照明、天氣條件等)以及自動(dòng)車輛的啟動(dòng)條件和任務(wù)組成。交通參與者可以是靜態(tài)的,也可以是動(dòng)態(tài)的,包括其他道路使用者,如其他車輛、行人和自行車。系統(tǒng)地定義和編目這些場(chǎng)景,以確保全面覆蓋自動(dòng)化車輛預(yù)期運(yùn)行設(shè)計(jì)領(lǐng)域中的交通情況。
使用虛擬試駕模擬對(duì)自動(dòng)化車輛的各個(gè)部件進(jìn)行單獨(dú)測(cè)試和組合測(cè)試。為了有效地執(zhí)行此操作,需要同時(shí)運(yùn)行數(shù)千個(gè)模擬。
除了在自動(dòng)車輛正常運(yùn)行時(shí)(即使在具有挑戰(zhàn)性的情況下)測(cè)試和驗(yàn)證其運(yùn)行外,我們還使用模擬來驗(yàn)證應(yīng)急性能,并確保自動(dòng)車輛能夠在需要時(shí)達(dá)到最低風(fēng)險(xiǎn)條件。
我們將相同的評(píng)估方法應(yīng)用于封閉軌道和公共道路上的模擬和實(shí)際試駕,使我們能夠比較和驗(yàn)證模擬和真實(shí)場(chǎng)景之間的結(jié)果。
人機(jī)界面
由于自動(dòng)化車輛沒有駕駛員,因此它們必須能夠與乘客進(jìn)行通信,以提供各種信息,例如當(dāng)前位置、到達(dá)目的地的時(shí)間和緊急指示。
這種交流需要直觀且易于理解,適用于范圍廣泛的乘客,包括聽力或視覺殘疾以及輕度認(rèn)知障礙的乘客。如果乘客遇到緊急情況,他或她需要能夠輕松地停止車輛和/或啟動(dòng)與車隊(duì)運(yùn)營(yíng)中心的通信,同時(shí)迅速收到他們的信息并采取進(jìn)一步行動(dòng)的反饋。如果車輛或車隊(duì)運(yùn)營(yíng)中心需要與乘客溝通,同樣適用:如果出現(xiàn)需要向乘客發(fā)出警報(bào)的問題,必須快速、清晰地發(fā)生。
自動(dòng)化車輛與其他道路使用者通信的能力也很重要。今天,交通中人們之間的大部分交流都是通過手勢(shì)或眼神交流進(jìn)行的。因此,自動(dòng)化車輛需要用其他適當(dāng)?shù)姆绞饺〈@種通信。
梅賽德斯-奔馳正在為其自動(dòng)化車輛設(shè)計(jì)直觀的界面概念,以確保與它的通信盡可能自然,盡可能普及。
車輛網(wǎng)絡(luò)安全
車輛網(wǎng)絡(luò)安全是確保車輛、乘客和其他交通參與者安全的重要組成部分。為了實(shí)現(xiàn)端到端的安全,梅賽德斯-奔馳和博世采用縱深防御方法。其穩(wěn)健的整體設(shè)計(jì)包括安全工程過程中的所有產(chǎn)品和服務(wù)層——從自動(dòng)駕駛車輛及其組件(如傳感器)到車隊(duì)運(yùn)營(yíng)中心和后端服務(wù)器。
我們的主要目標(biāo)是提供安全性,同時(shí)防止和減輕由于未經(jīng)授權(quán)的操縱、干擾或任何類型的網(wǎng)絡(luò)攻擊而導(dǎo)致的所有故障。
我們的安全工程流程以迭代方式遵循ISO 27005和31000標(biāo)準(zhǔn)中針對(duì)基于風(fēng)險(xiǎn)的工程的原則:
1.威脅和風(fēng)險(xiǎn)分析:可能出現(xiàn)什么問題?會(huì)有多糟?發(fā)生的可能性有多大?2.安全理念:我們應(yīng)該怎么做?3.剩余風(fēng)險(xiǎn)分析:我們做得夠多了嗎?
該方法與汽車安全規(guī)范ISO/SAE 21434中制定的建議一起實(shí)施。除了采用系統(tǒng)開發(fā)的方法外,還包括定義和使用最佳實(shí)踐作為技術(shù)實(shí)施的基準(zhǔn),重點(diǎn)是自動(dòng)化車輛的整個(gè)生命周期。由于后端服務(wù)通過無線方式提供給車輛的控制功能對(duì)于自動(dòng)化車輛非常重要,因此,必須在安全設(shè)計(jì)中解決由連接性質(zhì)導(dǎo)致的網(wǎng)絡(luò)攻擊表面。因此,我們?yōu)獒槍?duì)后端連接的攻擊提供適當(dāng)?shù)谋Wo(hù)
傳承、合作、持續(xù)改進(jìn)
梅賽德斯-奔馳(Mercedes-Benz)和博世(Bosch)不僅是汽車安全領(lǐng)域的先驅(qū),也是互聯(lián)車輛安全領(lǐng)域的創(chuàng)新者。我們對(duì)合作研究活動(dòng)的貢獻(xiàn),如電子安全車輛入侵保護(hù)應(yīng)用程序(EVITA)、防撞指標(biāo)合作伙伴關(guān)系(CAMP)和汽車開放系統(tǒng)體系結(jié)構(gòu)(AUTOSAR)等等,已經(jīng)制定了車輛的汽車硬件安全模塊規(guī)范和車內(nèi)數(shù)據(jù)庫(kù)的安全通信標(biāo)準(zhǔn)。我們是新的汽車網(wǎng)絡(luò)安全規(guī)范ISO/SAE 21434的積極貢獻(xiàn)者,并使用汽車信息共享和分析中心(Auto ISAC)等平臺(tái),通過與其他汽車行業(yè)分享經(jīng)驗(yàn)和最佳實(shí)踐,確保持續(xù)改進(jìn)。
Auto ISAC旨在為汽車制造商和供應(yīng)商提供一個(gè)論壇,以分享可能對(duì)美國(guó)道路運(yùn)輸安全產(chǎn)生不利影響的網(wǎng)絡(luò)安全威脅信息。梅賽德斯-奔馳和博世是Auto ISAC的積極成員,它還符合ISO/SAE 21434-“道路車輛-網(wǎng)絡(luò)安全工程”,涵蓋以下領(lǐng)域:
1.事故響應(yīng)
2.與相關(guān)第三方的合作和約定
3.治理
4.風(fēng)險(xiǎn)管理
5.設(shè)計(jì)安全
6.威脅檢測(cè)和保護(hù)
7.認(rèn)識(shí)和培訓(xùn)
耐撞性
為了保護(hù)乘客,梅賽德斯-奔馳不斷創(chuàng)新乘客保護(hù)系統(tǒng)。從碰撞區(qū)的發(fā)明到乘員保護(hù)和事故避免方面的無數(shù)創(chuàng)新,梅賽德斯-奔馳(Mercedes-Benz)向市場(chǎng)推出的“安全第一”確立了許多其他汽車所遵循的標(biāo)準(zhǔn)。梅賽德斯-奔馳汽車開發(fā)過程中應(yīng)用的基本設(shè)計(jì)原則也適用于梅賽德斯-奔馳的自動(dòng)化車輛。
自動(dòng)化車輛的結(jié)構(gòu)為其乘員的安全提供了基礎(chǔ)。超高強(qiáng)度鋼和熱成型鋼合金用于車身和底盤結(jié)構(gòu)的臨界載荷路徑,以保護(hù)乘客艙并在碰撞過程中耗散能量。鋁元素還集成到車輛結(jié)構(gòu)和底盤中,以進(jìn)一步增強(qiáng)結(jié)構(gòu)剛度和碰撞能量吸收性能。用于開發(fā)這種混合結(jié)構(gòu)的先進(jìn)模擬和測(cè)試方法驗(yàn)證了它符合梅賽德斯-奔馳的乘員保護(hù)高標(biāo)準(zhǔn)。
最先進(jìn)的主約束系統(tǒng)和集成的PRE-SAFE®系統(tǒng)進(jìn)一步增強(qiáng)了乘員保護(hù)。除了可逆式電子安全帶張緊器外,PRE-SAFE®功能還提供與安全帶負(fù)載限制技術(shù)相結(jié)合的自適應(yīng)安全帶張緊功能。后排座椅還包括用于安裝兒童座椅的閂鎖錨固件。
先進(jìn)的安全氣囊在發(fā)生正面碰撞時(shí)提供額外的乘員保護(hù)。前排乘客安全氣囊的設(shè)計(jì)可根據(jù)碰撞嚴(yán)重程度提供兩級(jí)充氣能量。它們還根據(jù)乘客座椅位置自動(dòng)調(diào)整充氣能量。最后,窗簾式安全氣囊集成在一起,在側(cè)面碰撞時(shí)提供頭部保護(hù)。
數(shù)據(jù)隱私、數(shù)據(jù)記錄和碰撞后自動(dòng)車輛行為
當(dāng)自動(dòng)車輛檢測(cè)到發(fā)生碰撞時(shí),它將過渡到最低風(fēng)險(xiǎn)狀態(tài)。車隊(duì)運(yùn)營(yíng)中心將啟動(dòng)適當(dāng)?shù)呐鲎埠蟪绦颍摮绦蚩砂ɑ谲囕v自我評(píng)估的措施。車隊(duì)運(yùn)營(yíng)主管可能會(huì)對(duì)車輛的可駕駛性進(jìn)行評(píng)估,并將啟動(dòng)必要的步驟來取回車輛和乘客,并在需要時(shí)向應(yīng)急服務(wù)部門發(fā)出警報(bào)。
自動(dòng)車輛配備了與傳統(tǒng)車輛事件數(shù)據(jù)記錄器(EDR)類似的數(shù)據(jù)記錄功能,使車輛能夠存儲(chǔ)碰撞事件相關(guān)數(shù)據(jù),以便進(jìn)行重建。該信息可用于分析特定碰撞事件并制定適當(dāng)?shù)膶?duì)策。
根據(jù)適用的隱私法律法規(guī)維護(hù)自動(dòng)車輛上和車外的安全數(shù)據(jù)存儲(chǔ)。作為汽車制造商聯(lián)盟的成員,梅賽德斯-奔馳還遵循2014年11月發(fā)布并于2018年初更新的“汽車消費(fèi)者隱私原則”。這些原則結(jié)合了公平信息實(shí)踐和聯(lián)邦貿(mào)易委員會(huì)指南,以建立一套保護(hù)措施,用于個(gè)人識(shí)別與相關(guān)車輛技術(shù)一起使用的信息。它們反映了全行業(yè)的承諾,即在提供車輛和運(yùn)輸服務(wù)時(shí),對(duì)所收集的信息負(fù)責(zé)。
消費(fèi)者教育和培訓(xùn)
梅賽德斯-奔馳(Mercedes-Benz)和博世(Bosch)認(rèn)真對(duì)待安全承諾,向公眾通報(bào)計(jì)劃中的試點(diǎn)項(xiàng)目,并向執(zhí)法和公共安全官員介紹自動(dòng)化車輛的能力。梅賽德斯-奔馳和博世計(jì)劃與城市合作,在梅賽德斯-奔馳推出使用自動(dòng)化車輛的商業(yè)打車服務(wù)之前進(jìn)行試點(diǎn)測(cè)試。在這些伙伴關(guān)系協(xié)議中,將采取措施確保公眾通過社區(qū)參與和外聯(lián)計(jì)劃了解情況。公共安全官員,如警察和消防部門人員,也將接受教育,了解在需要時(shí)如何與梅賽德斯-奔馳的自動(dòng)車輛互動(dòng)。這確保了當(dāng)?shù)貞?yīng)急響應(yīng)人員能夠理解和應(yīng)用所有適用的車輛應(yīng)急程序,就像梅賽德斯-奔馳的常規(guī)車輛一樣。為確保公共安全而采取的措施將在社區(qū)宣傳材料中介紹和解釋。
任何移動(dòng)服務(wù)都必須非??煽坎拍艹晒?。梅賽德斯-奔馳自動(dòng)化車輛旨在為客戶提供簡(jiǎn)單、直觀和令人滿意的體驗(yàn)。
結(jié)論
人們想要什么技術(shù)可以給他們?
自動(dòng)化車輛的愿景正在逐步成為現(xiàn)實(shí)。自動(dòng)化車輛為社會(huì)帶來了諸多好處,從提高交通安全性和無法駕駛者的機(jī)動(dòng)性到減少擁堵和降低交通成本。
自動(dòng)化車輛的廣泛引入也帶來了改變城市和人們生活和工作方式的潛力。汽車可以成為一個(gè)工作空間,也可以成為人們旅行時(shí)放松和提神的地方。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 64



 廣告
廣告 編輯推薦



最新資訊
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評(píng)價(jià)開始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
