




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
邁銳寶XL行星排齒輪測(cè)繪及工作原理分析
2022-02-08 12:57:50· 來(lái)源:汽車(chē)動(dòng)力總成

01、概述說(shuō)起混動(dòng),人們首先想到的是豐田Prius,其實(shí)還有一位優(yōu)等生——通用Volt,沃藍(lán)達(dá)變速箱共迭代了兩次,在通用內(nèi)部第一代命名為4ET50,第二代命名為5ET50
01、概述
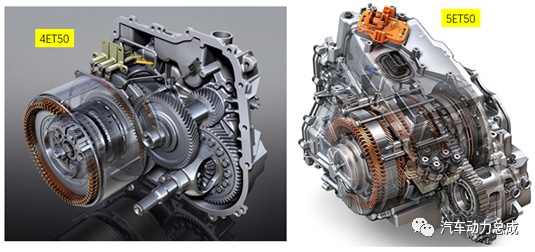
圖1 Volt第一代和第二代DHT
關(guān)注混動(dòng)發(fā)展,了解這段歷史的人們都知道,豐田于1995年在東京車(chē)展上推出第一代Prius,并于1996年提出THS-Ⅰ的專(zhuān)利,1997年P(guān)rius正式上市。同樣,通用在混動(dòng)上的研究也不差。幾乎和豐田THS同步,通用于1995年即提出自己的功率分流方案專(zhuān)利申請(qǐng),2001年Volt-Ⅱ的方案就已經(jīng)成型,2007年底特律車(chē)展上Volt-Ⅰ揭開(kāi)面紗,2010年11月Volt-Ⅰ在北美上市,2016年10月Volt-Ⅱ正式推出。5ET50分別搭載于凱迪拉克CT6、別克君越和邁銳寶XL上面,本文的齒輪測(cè)繪即基于混動(dòng)版邁銳寶XL行星排開(kāi)展,并分析其工作原理。
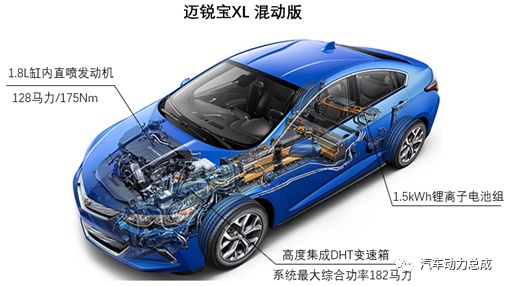
Volt-Ⅱ的特點(diǎn)是雙電機(jī)系統(tǒng),采用兩個(gè)簡(jiǎn)單行星排的組合,有一個(gè)制動(dòng)器、一個(gè)離合器、一個(gè)多模離合器??蓪?shí)現(xiàn)兩種純電模式,一個(gè)輸入動(dòng)力分流模式(ECVT1),一個(gè)固定速比模式,一個(gè)復(fù)合動(dòng)力分流模式(ECVT2)。功率分流模式高效運(yùn)行兼顧了經(jīng)濟(jì)性,固定傳動(dòng)比模式大扭矩輸出兼顧了動(dòng)力性,0-100kph加速時(shí)間為8.8s,百公里油耗為4.3L,其動(dòng)力系統(tǒng)參數(shù)見(jiàn)下表。
表1 邁銳寶動(dòng)力系統(tǒng)性能參數(shù)

02、行星排齒輪測(cè)繪
邁銳寶XL混動(dòng)系統(tǒng)DHT的剖視面圖如下

圖3 5ET50剖面圖
為了闡述方便同時(shí)為了避免混淆,對(duì)5ET50行星排進(jìn)行編號(hào)命名,見(jiàn)如下結(jié)構(gòu)簡(jiǎn)圖
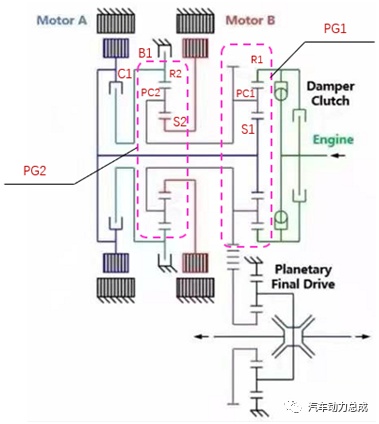
圖4 結(jié)構(gòu)簡(jiǎn)圖
限于篇幅,這里直接給出測(cè)繪和計(jì)算的結(jié)果,略去繁瑣的測(cè)量和計(jì)算過(guò)程,具體參見(jiàn)表2和表3
表2 PG1齒輪參數(shù)測(cè)繪表


PG1太陽(yáng)輪、行星輪和齒圈測(cè)繪齒形同實(shí)物對(duì)比見(jiàn)圖5、6、7

圖5 PG1太陽(yáng)輪測(cè)繪齒形和實(shí)物對(duì)比


圖7 PG1大齒圈測(cè)繪齒形和實(shí)物對(duì)比
表3 PG2齒輪參數(shù)測(cè)繪表


PG2太陽(yáng)輪、行星輪和齒圈測(cè)繪齒形同實(shí)物對(duì)比見(jiàn)圖8、9、10
圖8 PG2太陽(yáng)輪測(cè)繪齒形和實(shí)物對(duì)比
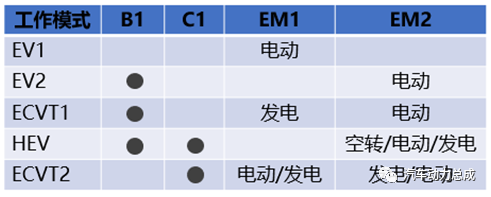
圖9 PG2行星輪測(cè)繪齒形和實(shí)物對(duì)比

圖10 PG2內(nèi)齒圈測(cè)繪齒形和實(shí)物對(duì)比
03、工作模式分析
觀察圖4,邁銳寶XL混動(dòng)箱的連接方式是發(fā)動(dòng)機(jī)ICE動(dòng)力經(jīng)過(guò)扭轉(zhuǎn)減振器后和PG1的齒圈R1相連,S1連接輔助電機(jī)MotorA,PC1和PC2共軸并通過(guò)鏈條傳動(dòng)將動(dòng)力輸出到和差速器相連的行星排,S2連接驅(qū)動(dòng)電機(jī)MotorB,PG2的內(nèi)齒圈R2可以通過(guò)制動(dòng)器B1固連到殼體,同時(shí)R2又通過(guò)離合器C1實(shí)現(xiàn)和PG1的太陽(yáng)輪S1相連。
除駐車(chē)充電、能量回收外,該箱共有5種常用的工作模式,其中兩種純電動(dòng)模式,分別定義為EV1和EV2,EV1是輔助電機(jī)A驅(qū)動(dòng),EV2為驅(qū)動(dòng)電機(jī)B驅(qū)動(dòng)。邁銳寶DHT取消了單向離合器,因?yàn)闆](méi)有了大小電機(jī)共同驅(qū)動(dòng)的模式,不用擔(dān)心發(fā)動(dòng)機(jī)被反拖的情況,所以取消了單向離合器。HEV有三種模式,輸入動(dòng)力分流模式定義為ECVT1,固定速比模式定義為HEV,復(fù)合動(dòng)力分流模式定義為ECVT2。其控制策略是在0~60kph大扭矩或者20~40kph小扭矩時(shí)使用ECVT1模式,在70~110kph大扭矩或者40~60kph小扭矩時(shí)使用HEV模式,在大于110kph大扭矩或者大于60kph小扭矩時(shí)使用ECVT2模式。模式切換邏輯見(jiàn)表4
表4 邁銳寶XL模式切換邏輯
EV1模式的杠桿圖,功率流如圖11所示
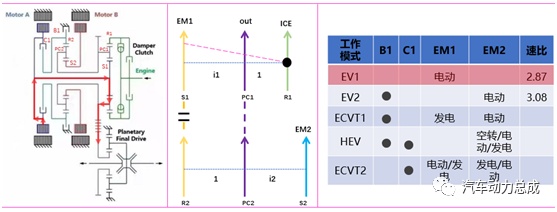
圖11 EV1模式
上圖中EM1為MotorA,EM2為MotorB。i1=ZR1/ZS1,結(jié)合表2齒數(shù)信息,i1=86/46=1.87。i2=ZR2/ZS2,結(jié)合表3齒數(shù)信息,i2=81/39=2.08。EV1因R1和發(fā)動(dòng)機(jī)連接,此時(shí)發(fā)動(dòng)機(jī)曲軸的摩擦力使得R1固定不動(dòng)提供支點(diǎn),速比i=ns1/npc1=i1+1=2.87。
EV2模式的杠桿圖,功率流如圖12所示
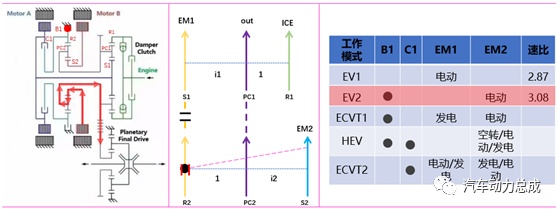
圖12 EV2模式
當(dāng)車(chē)速進(jìn)一步增加,需求扭矩增大,發(fā)動(dòng)機(jī)介入,進(jìn)入輸入功率分流模式,功率流和杠桿姿態(tài)如圖13所示

圖13 ECVT1模式
ECVT1模式為輸入動(dòng)力分流,發(fā)動(dòng)機(jī)能量在PG1行星排上被分成兩路,一路為機(jī)械路徑直接通過(guò)PC1輸出驅(qū)動(dòng)車(chē)輛,另一路為電功率,驅(qū)動(dòng)EM1轉(zhuǎn)子切割磁感線發(fā)電,電能或用于儲(chǔ)存(SOC低于設(shè)定值時(shí))或用于驅(qū)動(dòng)EM2電機(jī)進(jìn)而驅(qū)動(dòng)車(chē)輛。
固定速比HEV模式,B1和C1同時(shí)閉合,此時(shí)S1和R2同軸,PC1和PC2同軸,杠桿圖可以方便的用四軸系統(tǒng)描述,具體見(jiàn)圖14

圖14 固定速比HEV模式
固定速比模式時(shí),EM1空轉(zhuǎn),EM2有三種狀態(tài),當(dāng)SOC值較低時(shí),EM2被發(fā)動(dòng)機(jī)驅(qū)動(dòng)對(duì)電池進(jìn)行充電;當(dāng)EM2和EM1一樣空轉(zhuǎn)時(shí),發(fā)動(dòng)機(jī)直驅(qū);當(dāng)SOC值較高時(shí),EM2電動(dòng)助力和發(fā)動(dòng)機(jī)共同驅(qū)動(dòng)車(chē)輛。
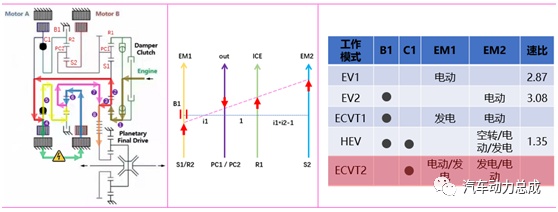
圖15 ECVT2模式
ECVT2模式是復(fù)合動(dòng)力分流模式,所謂“復(fù)合”包含著這樣的涵義,即至少有兩種單一分流模式組合在一起。ECVT2正是這樣,它由輸入和輸出兩種分流模式復(fù)合,見(jiàn)圖15。
04、關(guān)于復(fù)合動(dòng)力分流的討論
復(fù)合動(dòng)力分流有個(gè)很神奇的特點(diǎn),EM1和EM2的角色會(huì)隨著速比的變化而相互轉(zhuǎn)變,也即在某一時(shí)刻,EM1為發(fā)電,EM2為電動(dòng),而隨著車(chē)速的增快,下一時(shí)刻,EM1轉(zhuǎn)變?yōu)殡妱?dòng),而EM2則轉(zhuǎn)變?yōu)榘l(fā)電。下面根據(jù)5ET50行星排齒輪參數(shù),在軟件中繪制電機(jī)EM1的功率占比曲線,結(jié)合功率比曲線討論EM1和EM2的角色互換。
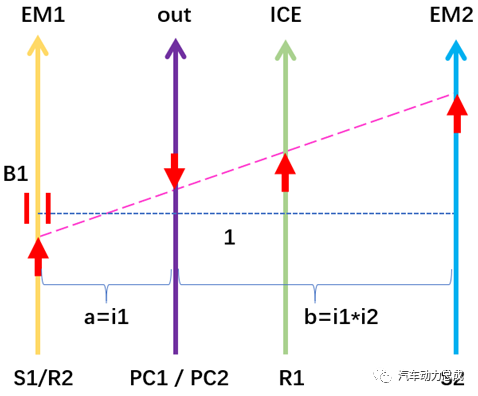
圖16 復(fù)合動(dòng)力分流杠桿模型
圖16是基于5ET50繪制,在杠桿圖上設(shè)輸出端到發(fā)動(dòng)機(jī)距離為單位1,到EM1距離為a,到EM2距離為b,這里a=i1=-1.87(負(fù)號(hào)表示EM1在輸出端左側(cè)),b=|i1*i2|=3.89,則有如下公式

上式中,i是發(fā)動(dòng)機(jī)轉(zhuǎn)速和輸出轉(zhuǎn)速的比值,也就是速比,η是EM1和EM2能量轉(zhuǎn)換時(shí)的效率,αE1是EM1的電功率和發(fā)動(dòng)機(jī)功率的比值,根據(jù)上述公式,得到如下曲線

圖17 復(fù)合動(dòng)力分流模式下電機(jī)EM1功率和發(fā)動(dòng)機(jī)功率的比
圖17中,在A點(diǎn)的右側(cè),速比較大,車(chē)速較慢,此時(shí)EM1電功率<0,也就是說(shuō)EM1處于發(fā)電狀態(tài),假設(shè)不考慮電池的充放電,顯然EM1 發(fā)的電能只能由EM2來(lái)消耗,也就是說(shuō)EM2必然處于電動(dòng)狀態(tài),事實(shí)上將αE1和αE2繪制在一張圖上看得更為清晰,見(jiàn)圖18
圖18 復(fù)合動(dòng)力分流模式下電機(jī)EM1、EM2功率和發(fā)動(dòng)機(jī)功率的比
再看圖17,A點(diǎn)右側(cè)時(shí)的杠桿姿態(tài)見(jiàn)圖16,此時(shí)的功率流向如圖19所示。
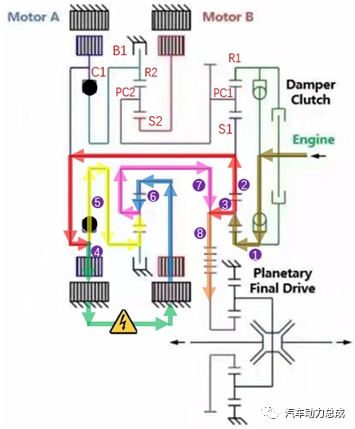
圖19 點(diǎn)A右側(cè)時(shí)的功率流
解釋一下圖19,發(fā)動(dòng)機(jī)功率①在PG1行星排上被分成②③兩路,第②路又被分成④⑤兩路,第④路驅(qū)動(dòng)EM1發(fā)電,電能用于EM2的驅(qū)動(dòng),是為第⑥路,⑤和⑥兩路在PG2上匯流成第⑦路,最后③和⑦兩路匯合成⑧輸出。該狀態(tài)下,PG1為輸入動(dòng)力分流,PG2為輸出動(dòng)力分離,兩種單一分流模式合在一起,故稱(chēng)為復(fù)合動(dòng)力分流。
當(dāng)車(chē)速進(jìn)一步增加,速比減小,越過(guò)A點(diǎn),此時(shí)EM1電功率>0,在AB之間,也就是說(shuō)EM1處于電動(dòng)狀態(tài),由圖18知,EM2為發(fā)電狀態(tài),杠桿姿態(tài)如下圖

圖20 復(fù)合動(dòng)力分流模式AB之間杠桿姿態(tài)
此時(shí)的功率流如圖21所示

圖21 AB之間時(shí)的功率流
比較圖21和圖19,功率流截然相反,發(fā)動(dòng)機(jī)功率①在PG1行星排上和功率流②匯聚成③輸出,顯然這是輸出動(dòng)力分流模式。第③路又被分成⑦⑧兩路,支路⑧直接輸出,支路⑦進(jìn)入PG2行星排后分成⑤和⑥兩路,顯然這是輸入動(dòng)力分流。第⑥路驅(qū)動(dòng)EM2發(fā)電,產(chǎn)生的電能驅(qū)動(dòng)EM1,是為第④路,④和⑤匯流成第②路。與圖19不同的是該狀態(tài)下,PG1為輸出動(dòng)力分流,PG2為輸入動(dòng)力分離,它們組合在一起也稱(chēng)為復(fù)合動(dòng)力分流。
總結(jié)下來(lái),所謂復(fù)合動(dòng)力分流就是將單一的輸入或是輸出動(dòng)力分流組合在一起,根據(jù)效率高低擇優(yōu)進(jìn)行單獨(dú)或是組合使用,以達(dá)到高效省油的目的,這也是復(fù)合動(dòng)力分流DHT設(shè)計(jì)的初衷。
05、總結(jié)
雖然通用在2019年因研發(fā)資源向純電動(dòng)傾斜而終止了包括Volt、Malibu在內(nèi)的混動(dòng)車(chē)型,但是5ET50任然是一款及其優(yōu)秀的變速箱,值得我們研究學(xué)習(xí)。4ET50是業(yè)界首次使用輸出動(dòng)力分流量產(chǎn)的DHT,具有極大的創(chuàng)新,豐富了功率分流的使用范圍。不管是4ET50還是5ET50,其對(duì)性能的不斷追求,值得我們投去敬意的一瞥。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 68



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車(chē)操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車(chē)異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車(chē)大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車(chē)大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評(píng)價(jià)開(kāi)始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
