




 廣告
廣告





















































低速自動駕駛技術(shù):APA
2022-02-20 18:40:59· 來源:汽車ECU開發(fā)

面有了飛速發(fā)展,還出現(xiàn)了智能化的趨勢?!白詣硬窜嚒本褪且粋€大家非常熟悉的功能,透過它我們能看到汽車智能化發(fā)展的縮影。簡介:什么是“自動泊車”?自動泊車
面有了飛速發(fā)展,還出現(xiàn)了智能化的趨勢?!白詣硬窜嚒本褪且粋€大家非常熟悉的功能,透過它我們能看到汽車智能化發(fā)展的縮影。
簡介:什么是“自動泊車”?
自動泊車系統(tǒng)簡稱APA。
搭載有自動泊車功能的汽車可以不需要人工干預(yù),通過車載傳感器、處理器和控制系統(tǒng)的幫助就可以實現(xiàn)自動識別車位,并自動完成泊車入位的過程。一般來說,在20萬以上的中高端汽車上往往才有搭載,或者作為一項選裝功能獨立存在。(現(xiàn)在已經(jīng)下探到15萬左右,當(dāng)然了,一般是自主品牌才敢給出這個極具性價比的配置)
自動泊車系統(tǒng)可以大大簡化泊車過程,特別是在極端狹窄的地方,或者是對于新手而言,自動泊車系統(tǒng)可以帶來更加智能和便捷的體驗。
自動泊車系統(tǒng)
01 定義
自動泊車系統(tǒng)主要是利用遍布車輛自身和周邊環(huán)境里的傳感器,測量車輛自身與周邊物體之間的相對距離、速度和角度,然后通過車載計算平臺或云計算平臺計算出操作流程,并控制車輛的轉(zhuǎn)向和加減速,以實現(xiàn)自動泊入、泊出及部分行駛功能。
整個泊車過程大致可包含以下五大環(huán)節(jié):
環(huán)境感知
停車位檢測與識別
泊車路徑規(guī)劃
泊車路徑跟隨控制
模擬顯示
按照泊車方式,分為三種模式,如圖1所示:
平行式泊車
垂直式泊車
斜列式泊車
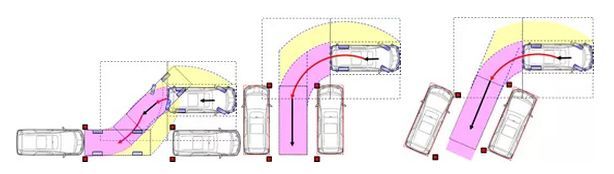
圖1 平行泊車 垂直泊車 斜列式泊車
按照自動化程度等級,自動泊車可以分為:
半自動泊車
全自動泊車
半自動泊車系統(tǒng)為駕駛員操控車速,計算平臺根據(jù)車速及周邊環(huán)境來確定并執(zhí)行轉(zhuǎn)向,對應(yīng)于SAE自動駕駛級別中的L1;
全自動泊車為計算平臺根據(jù)周邊環(huán)境來確定并執(zhí)行轉(zhuǎn)向和加減速等全部操作,駕駛員可在車內(nèi)或車外監(jiān)控,對應(yīng)于SAE L2級。
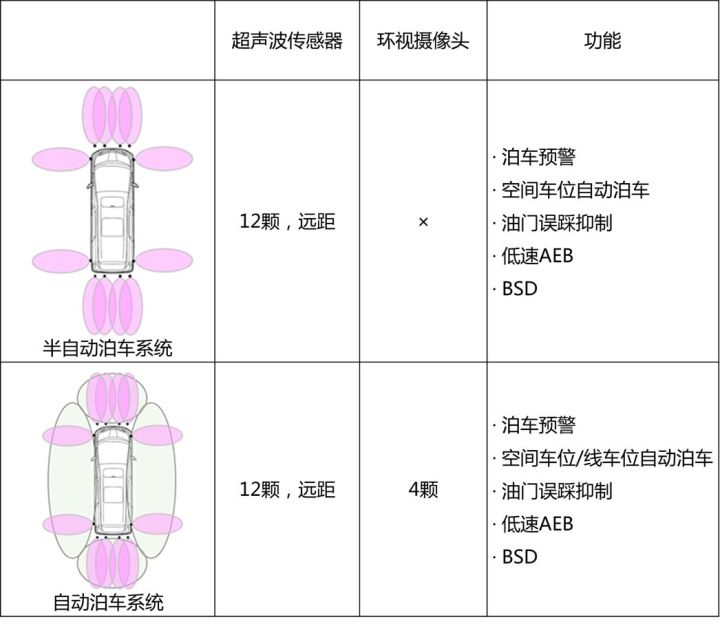
按照所采用傳感器的種類,半自動/全自動泊車可以分為:
超聲波自動泊車
基于超聲波與攝像頭的融合式自動泊車
兩種傳感器的對比如表1所示:
表1

02 原理方案
敲黑板!整個泊車過程是哪幾個環(huán)節(jié)?
環(huán)境感知、停車位檢測與識別、泊車路徑規(guī)劃、泊車路徑跟隨控制以及模擬顯示五大環(huán)節(jié)!
下面我們就以最常見的超聲波自動泊車系統(tǒng)為例,從五大環(huán)節(jié)來介紹:
▲環(huán)境感知
如圖2所示,為一種典型的超聲波自動泊車系統(tǒng)的環(huán)境感知方案,由12個超聲波雷達組成。

圖2
■8個超聲波雷達:泊車過程中檢測車身周邊的障礙物,避免剮蹭
■4個超聲波雷達:泊車開始前進行車位的探測及在泊車過程中提供側(cè)向障礙物信息
▲停車位檢測與識別
自動泊車超聲波車位探測系統(tǒng)主要是由布置在車身側(cè)面的超聲測距模塊構(gòu)成的, 通過超聲傳感器對車輛側(cè)面的障礙物進行探測, 即可完成車位探測及定位。
超聲波車位探測的過程如圖3 所示。在探測車位時, 車輛以某一恒定車速V平行駛向泊車位:
「1」當(dāng)車輛駛過 1 號車停放的位置時,裝在車身側(cè)面的超聲波傳感器開始測量車輛與 1 號車的橫向距離 D。
「2」當(dāng)車輛通過 1 號車的上邊緣時,超聲波傳感器測量的數(shù)值會有一個跳變,記錄此時時刻。
「3」車輛繼續(xù)勻速前進,當(dāng)行駛在 1 號車與 2號車之間時,處理器可以求得車位的平均寬度W。
「4」當(dāng)通過 2 號車下邊緣時,超聲波傳感器測量的數(shù)值又發(fā)生跳變,處理器記錄當(dāng)前時刻,算得最終的車位長度L。
「5」處理器對測量的車位長度 L 和寬度 W 進行分析,判斷車位是否符合泊車基本要求并判斷車位類型。
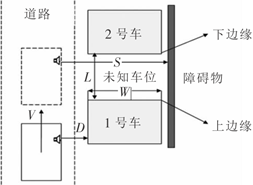
圖3
▲泊車路徑規(guī)劃
考慮到自動泊車實現(xiàn)原理,泊車路徑規(guī)劃一般盡可能滿足以下要求:
a.完成泊車路徑所需要的動作必須盡可能少。
因為每個動作的精度誤差會傳遞到下一個動作,動作越多,精度越差。
b.在每個動作的實施過程中,車輛的轉(zhuǎn)向輪(絕大部分為前輪)的角度需要保持一致。
因為系統(tǒng)是通過嵌入式系統(tǒng)實現(xiàn)的,而嵌入式系統(tǒng)的性能有限,轉(zhuǎn)向輪角度保持一致能夠?qū)⑦\動軌跡的計算歸結(jié)為幾何問題,
反之需要涉及復(fù)雜的積分問題,這對嵌入式系統(tǒng)的性能是一個挑戰(zhàn)。
一般平行泊車和垂直泊車采用如圖4和5所示路徑。
平行泊車分為單次和多次:
單次為如圖4所示路徑一次泊車完成;
多次則為當(dāng)車位長度比較小時,可采用多次“揉庫”的方法泊車。

圖4
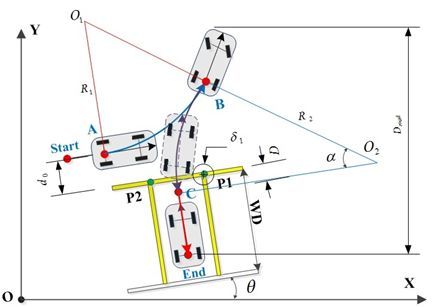
圖5
▲泊車路徑跟隨控制
該過程為通過車載傳感器不斷探測環(huán)境,實時估算車輛位置,實際運行路徑與理想路徑對比,必要時做局部校正。
▲模擬顯示
由傳感器反饋構(gòu)建泊車模擬環(huán)境,具有提示與交互作用。提示用戶處理器意圖以及做必要的操作。
另外,路徑規(guī)劃后進行泊車時為了知曉處理器定位和計算路徑運行情況,需要將這些處理器信息反饋給用戶。
如果處理器獲取環(huán)境信息或者處理過程中出現(xiàn)重大錯誤,用戶可以及時知曉與停止。
自主泊車系統(tǒng)
01 定義
隨著自動駕駛技術(shù)的發(fā)展,自動泊車逐漸往自主泊車方向演進。
自主泊車又稱為代客泊車或一鍵泊車:
指駕駛員可以在指定地點處召喚停車位上的車輛,或讓當(dāng)前駕駛的車輛停入指定或隨機的停車位。
整個過程正常狀態(tài)下無需人員操作和監(jiān)管,對應(yīng)于SAE L3級別。
自主泊車系統(tǒng)包含兩個功能,即泊車與喚車:
>>>>泊車功能
是指用戶通過車載中控大屏或手機APP選定在園區(qū)、住宅區(qū)等半封閉區(qū)域內(nèi)的停車位或者選定停車場(有高精地圖覆蓋)
然后車輛通過獲取園區(qū)、住宅區(qū)等半封閉道路上的車道線、道路交通標志、周圍其他車輛等交通環(huán)境、參與者信息;
控制車輛的油門、轉(zhuǎn)向、制動來實現(xiàn)安全自動駕駛,并通過自動尋找可用停車位或識別用戶選定停車位;
實現(xiàn)自動泊入、自動停車、掛P檔、熄火、鎖車門,同時防止?jié)撛诘呐鲎参kU的功能。
>>>>喚車功能
是指用戶通過手機APP選定園區(qū)、住宅區(qū)等半封閉區(qū)域內(nèi)的某一喚車點,
然后車輛從停車位自動泊出、低速自動駕駛到達喚車點,
從而實現(xiàn)喚車,同時防止?jié)撛诘呐鲎参kU的功能。
02 原理方案
按主要技術(shù)路線,自主泊車系統(tǒng)可分為:
偏車端方案
偏場端方案
車端場端并重方案
偏車端和偏場端的自主泊車方案對比如圖6所示:

圖6
偏車端自主泊車系統(tǒng)方案:
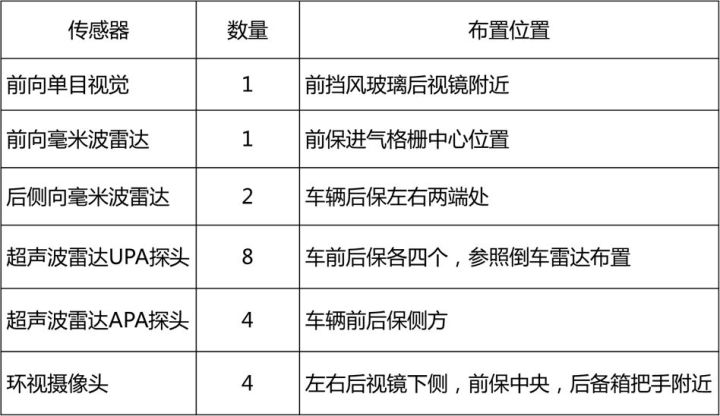
典型的偏車端自主泊車系統(tǒng)的組成見以下圖7和表2:

圖7
表2主要傳感器信息
偏車端方案的系統(tǒng)邏輯流程圖見下圖8:
由圖可知,偏車端方案主要借助車載傳感器對周圍環(huán)境以及自身狀態(tài)的感知來決策并執(zhí)行車輛動作,并在必要時提醒用戶進行車內(nèi)或遠程接管操控。
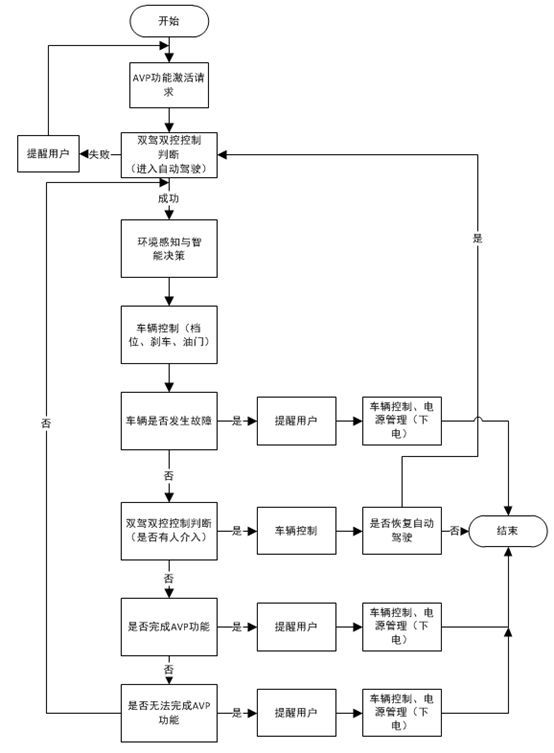
圖8
偏場端自主泊車系統(tǒng)方案:
圖9為一種偏場端方案的系統(tǒng)示意圖:
◤在停車場內(nèi)布置激光雷達或雙目攝像頭來實現(xiàn)對車輛狀態(tài)及周邊環(huán)境的監(jiān)控,通過預(yù)埋式停車場傳感器探測當(dāng)前占用狀態(tài)。
所有傳感器數(shù)據(jù)均在數(shù)據(jù)中心進行匯總分析,根據(jù)儲存的元信息(如停車位尺寸、費用、諸如殘疾人停車位等的特殊情況等)完成匹配。
數(shù)據(jù)中心根據(jù)這所有的信息實時生成停車地圖。
駕駛員通過智能手機APP接收所有的信息,從而始終能了解最近可用停車位的概況,以及所有相關(guān)詳情,如距離和價格。
而車輛只需要具備與停車場設(shè)施的通信能力和可控的底盤執(zhí)行系統(tǒng),即可在場端的輔助下完成自主泊車。◢
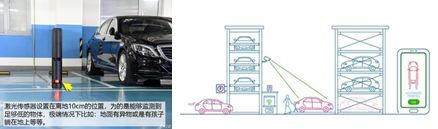

圖9
03 自動泊車系統(tǒng)
自動泊車系統(tǒng)組成及功能如表4所示:
表4
04 自主泊車系統(tǒng)
自主泊車系統(tǒng)方案如圖11所示,主要采用智能化車端+智能化場端的方式。
車端智能化主要依賴于融合式全自動泊車的傳感器配置,外加前視攝像頭、V2X設(shè)備等實現(xiàn)特定區(qū)域內(nèi)的點到點自動駕駛、自動車位掃描、自動泊入泊出等功能。
車輛自身具備車輛、行人等動態(tài)障礙物檢測和識別功能,可實現(xiàn)自動緊急制動、避障等決策規(guī)劃。
場端智能化主要依托攝像頭檢測技術(shù),實現(xiàn)停車場車位占用情況檢測,并上傳至停車場服務(wù)器,并實現(xiàn)為自主泊車車輛提前分配車位信息。
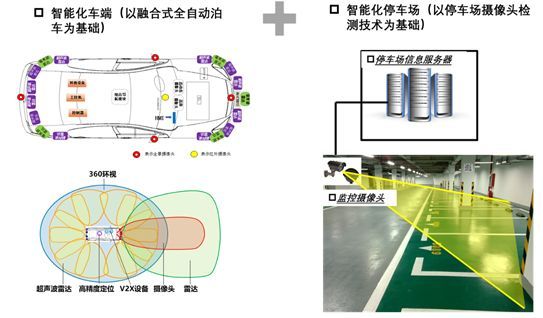
圖11
▲障礙物坐標檢測及多目標識別
超聲波傳感器單純的距離檢測能力在泊車預(yù)警輔助場景已可滿足使用要求,但是在智能化泊車應(yīng)用場景、及多傳感器融合應(yīng)用中還遠遠不夠。
為此開發(fā)了障礙物坐標檢測技術(shù)及多目標識別技術(shù),如圖12和圖13所示:
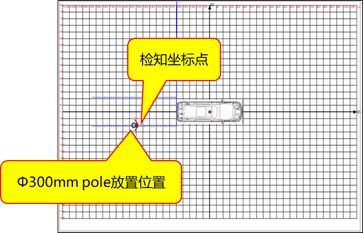
圖12
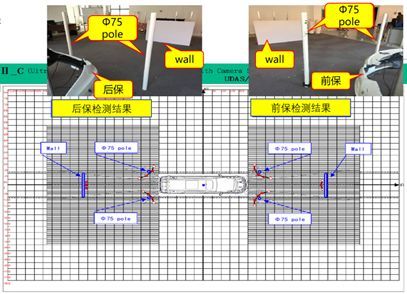
圖13
▲高精度車位檢測及車位融合
基于超聲波傳感器可實現(xiàn)空間車位的探測、360環(huán)視攝像頭可實現(xiàn)線車位的檢測。
同時結(jié)合超聲波傳感器及環(huán)視攝像頭的障礙物信息檢測,對車位進行多層次的融合,實現(xiàn)泊車位的高精度檢測,大大提升了泊車場景的覆蓋范圍。如圖14所示:

圖14
▲軌跡動態(tài)規(guī)劃技術(shù)
泊車過程中有諸多不可控因素,如轉(zhuǎn)向系統(tǒng)執(zhí)行速度與精度問題、參考障礙物位置變動問題等,導(dǎo)致在泊車過程中出現(xiàn)泊車軌跡偏離路徑規(guī)劃軌跡現(xiàn)象。
為此開發(fā)了泊車軌跡動態(tài)規(guī)劃技術(shù),可實現(xiàn)泊車過程中的軌跡實時修正甚至軌跡重規(guī)劃,如圖15所示:

圖15
▲室內(nèi)定位技術(shù)
如圖16所示,通過采用視覺SLAM+標簽輔助定位方式,解決地下停車場無GPS的問題,同時通過多源信息融合,提升定位精度。(劃重點,做筆記。)

圖16
▲基于視覺的停車場車位狀態(tài)檢測技術(shù)
如圖17所示,通過停車場安裝的監(jiān)控攝像頭,基于深度學(xué)習(xí)算法,實現(xiàn)車位占用狀態(tài)的實時檢測,并將此信息上傳至停車場車位管理后臺服務(wù)器,為自主泊車車輛提供可泊車位信息。
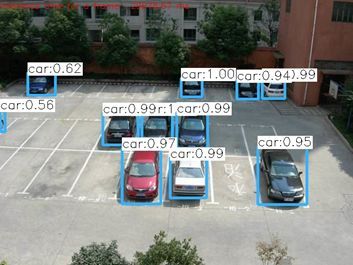
圖17
▲全局與局部路徑規(guī)劃技術(shù)
如圖18所示,基于A*算法實現(xiàn)任意兩點間的全局路徑規(guī)劃,支持路徑規(guī)劃重置、選路以及速度規(guī)劃功能,同時結(jié)合實時環(huán)境感知狀態(tài),進行局部路徑規(guī)劃,實現(xiàn)緊急制動、 跟車巡航以及換道避讓、 換道超車等自主決策。
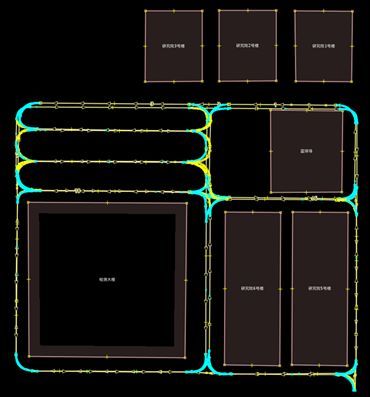
圖18
總結(jié)一下
泊車場景作為用戶痛點感受最深,技術(shù)實現(xiàn)相對容易,客戶最愿買單且最有機會率先落地的場景,是乘用車L4自動駕駛企業(yè)兵家必爭之地。
之前看過一篇文章,里面列舉了汽車十大最沒用的配置,自動泊車位列其中。而隨著自動泊車從半自動到全自動發(fā)展,我們看到了自動泊車作為低速自動駕駛更多的閃光點。自動泊車也逐漸從“雞肋”變成了“真香”。



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價開始從“電池單體性能指標”轉(zhuǎn)
2026-03-04 11:38
