




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
高級(jí)智能網(wǎng)聯(lián)系統(tǒng)的時(shí)間同步原理解析
2022-03-02 23:56:23· 來(lái)源:焉知智能汽車(chē)

對(duì)于整個(gè)自動(dòng)駕駛系統(tǒng)的時(shí)鐘同步來(lái)說(shuō),因?yàn)楦鱾€(gè)傳感器時(shí)鐘源都有鐘漂,而且每個(gè)時(shí)鐘源鐘漂不同,所以即使把各個(gè)傳感器時(shí)間戳在初始時(shí)刻對(duì)齊,運(yùn)行一段時(shí)間之后,
對(duì)于整個(gè)自動(dòng)駕駛系統(tǒng)的時(shí)鐘同步來(lái)說(shuō),因?yàn)楦鱾€(gè)傳感器時(shí)鐘源都有鐘漂,而且每個(gè)時(shí)鐘源鐘漂不同,所以即使把各個(gè)傳感器時(shí)間戳在初始時(shí)刻對(duì)齊,運(yùn)行一段時(shí)間之后,之前對(duì)齊的結(jié)果仍會(huì)偏離。因此,為了統(tǒng)一各個(gè)傳感器或芯片的時(shí)鐘,需進(jìn)行時(shí)間同步。同步過(guò)程需要設(shè)置相應(yīng)的同步時(shí)鐘源。當(dāng)前,常見(jiàn)的時(shí)間同步主要有以下幾種方式:
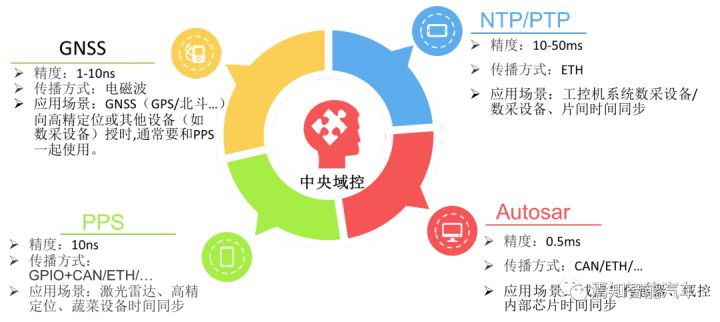
以上同步源中,大家可能對(duì)GNSS的定位功能比較熟悉,其實(shí)它的授時(shí)功能是和定位同等重要的功能,在自動(dòng)駕駛的傳感器配置里,GNSS是一個(gè)必備的傳感器,它自帶秒脈沖發(fā)生器,所以可以直接使用。而且GNSS信號(hào)能夠達(dá)到定位要求時(shí),自身時(shí)鐘也會(huì)受到衛(wèi)星上原子鐘的校正,從而進(jìn)一步提高精度。
其余時(shí)鐘同步原理我們將在如下章節(jié)中進(jìn)行詳細(xì)介紹。
域控與傳感器時(shí)間同步
在當(dāng)前分布式架構(gòu)中,通常的時(shí)間同步信號(hào)式通過(guò)can/canfd進(jìn)行傳輸,而下一代自動(dòng)駕駛系統(tǒng)則基本采用以太網(wǎng)進(jìn)行信號(hào)傳遞。對(duì)于融合需要的信息,需要在報(bào)文中打上相關(guān)的時(shí)間戳來(lái)進(jìn)行匹配,時(shí)間戳應(yīng)盡量接近目標(biāo)被探測(cè)到對(duì)的實(shí)際時(shí)刻。
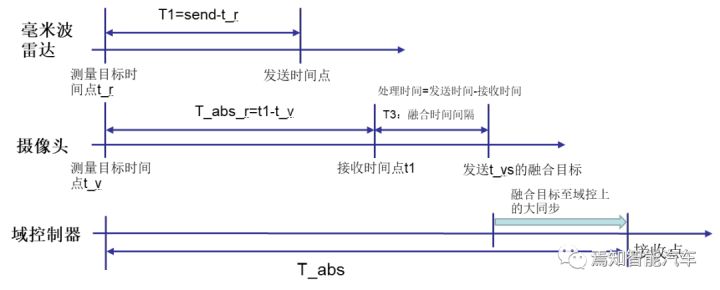
實(shí)例:以最通用分布式架構(gòu)5R1V1D為例說(shuō)明各個(gè)傳感器在時(shí)間同步上的原理。
方案一:由其中一個(gè)傳感器融合另外一個(gè)傳感器數(shù)據(jù),將接收時(shí)間點(diǎn)在對(duì)應(yīng)位置打上時(shí)間戳,然后整體發(fā)給域控制器。域控制器在接收到相應(yīng)的融合目標(biāo)后,在對(duì)應(yīng)接收點(diǎn)上打上時(shí)間戳。
臨時(shí)時(shí)間同步方案:
Tcan:表示通過(guò)can總線(xiàn)發(fā)送信息到攝像頭的時(shí)間間隔;
t1:攝像頭在本地時(shí)間接收到的時(shí)間點(diǎn)信息;
T1:攝像頭的發(fā)送時(shí)間-接收測(cè)量時(shí)間;
t_v:攝像頭本地時(shí)間測(cè)量點(diǎn);
t_r:雷達(dá)本地時(shí)間測(cè)量點(diǎn);
t_vs:攝像頭發(fā)送時(shí)間點(diǎn)為融合目標(biāo)本地時(shí)間;
T_abs:最后由傳感器發(fā)送到域控制器的時(shí)間差值;
方案二:基于域控制器底層基礎(chǔ)軟件Autosar的時(shí)間同步解決方案。AUTOSAR 解決方案,ADS 中的時(shí)間Master,每個(gè)傳感器中的時(shí)間Slave。帶有時(shí)間主控的 ECU 將在一個(gè)公共時(shí)基內(nèi)同步所有其他從屬 ECU。傳感器將發(fā)送時(shí)間戳以告知“何時(shí)測(cè)量目標(biāo)對(duì)象”。由于所有 ECU 在公共時(shí)基通信,域控制器會(huì)直接將所有傳感器數(shù)據(jù)置于公共時(shí)間坐標(biāo)中,然后重新計(jì)算到其本地時(shí)間供其使用。
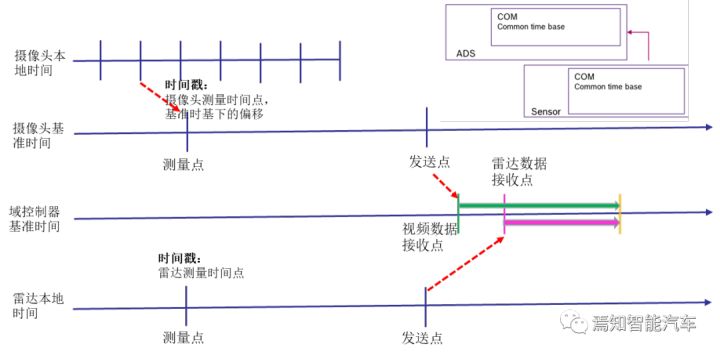
T_global_V:公共時(shí)基中的攝像頭測(cè)量時(shí)間點(diǎn);
T_global_R: 公共時(shí)基中的雷達(dá)測(cè)量時(shí)間點(diǎn);
Tmeasure: 公共時(shí)基中的環(huán)境目標(biāo)測(cè)量時(shí)間點(diǎn);
基礎(chǔ)GNSS+PPS的組合時(shí)間同步原理
本節(jié)主要講解基于組合慣導(dǎo)接收GNSS的授時(shí)和PPS時(shí)間同步的原理。由于激光雷達(dá)通常使用PPS進(jìn)行同步,高精定位普遍預(yù)留PPS。在開(kāi)發(fā)階段的數(shù)據(jù)采集中,可考慮使用此方法與域控同步。

1、GNSS授時(shí)
一般地,衛(wèi)星(GPS/北斗…)中會(huì)有精準(zhǔn)的時(shí)間信息(一般為UTC時(shí)間)。高精定位系統(tǒng)通過(guò)接受多顆衛(wèi)星的信號(hào),可以獲取精準(zhǔn)的UTC時(shí)間,此過(guò)程一般與定位過(guò)程一起進(jìn)行(可能需要時(shí)間信息來(lái)提高定位精度)。此方式的另外一個(gè)可能應(yīng)用是衛(wèi)星向數(shù)采設(shè)備授時(shí)。
2、PPS時(shí)間同步
在GNSS完成授時(shí)的同時(shí)需要通過(guò)GPIO將相應(yīng)的PPS信號(hào)從組合慣導(dǎo)系統(tǒng)ECU發(fā)送給中央域控制器HPC,兩者進(jìn)行過(guò)程會(huì)存在一定的時(shí)間差。如上圖所示,ECU過(guò)CAN/ETH發(fā)送當(dāng)下的UTC時(shí)刻給HPC,隨即ECU通過(guò)GPIO發(fā)送PPS給HPC,每次脈沖上升沿為當(dāng)前秒數(shù)開(kāi)始時(shí)間。隨后,HPC用PPS信號(hào)對(duì)UTC時(shí)間進(jìn)行修正,從PPS精度獲知能達(dá)到10ns。
基于NTP和PTP的時(shí)間同步
NTP即Network Time Protocol,網(wǎng)絡(luò)時(shí)間協(xié)議。是通過(guò)時(shí)鐘同步服務(wù)器從GPS衛(wèi)星上獲取標(biāo)準(zhǔn)的時(shí)間信號(hào),將這些信號(hào)通過(guò)各種接口傳輸給自動(dòng)化系統(tǒng)中需要時(shí)間信息的設(shè)備(計(jì)算機(jī)、保護(hù)裝置、故障錄波器、事件順序記錄裝置、安全自動(dòng)裝置、遠(yuǎn)動(dòng)RTU),這樣就可以達(dá)到整個(gè)系統(tǒng)的時(shí)間同步。NTP常用于Windows操作系統(tǒng)的時(shí)間同步,在局域網(wǎng)中精度在10ms左右??捎糜诰纫蟛桓叩臄?shù)采設(shè)備同步(供應(yīng)商方案)。
PTP 是一種高精度時(shí)間同步協(xié)議,可以到達(dá)亞微秒級(jí)精度,有資料說(shuō)可達(dá)到30納秒左右的偏差精度,但需要網(wǎng)絡(luò)的節(jié)點(diǎn)(交換機(jī))支持PTP協(xié)議,才能實(shí)現(xiàn)納秒量級(jí)的同步。一般在實(shí)際使用中,現(xiàn)有的NTP可以達(dá)到5ms以?xún)?nèi)的精度,對(duì)一般的應(yīng)用都是滿(mǎn)足的;對(duì)于超高精度設(shè)備,可以使用PTP設(shè)備提高同步精度。
與NTP主要區(qū)別:PTP是在硬件級(jí)實(shí)現(xiàn)的,NTP是在應(yīng)用層級(jí)別實(shí)現(xiàn)的。PTP 是主從同步系統(tǒng),一般采用硬件時(shí)間戳,并配合一些對(duì)NTP更高精度的延時(shí)測(cè)量算法。
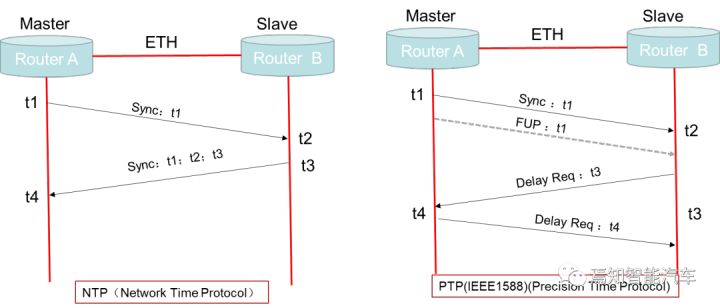
NTP時(shí)間同步過(guò)程如下:
Step1:t1時(shí)刻Master(Router A)發(fā)送NTP報(bào)文,該報(bào)文數(shù)據(jù)在t2時(shí)刻被Slave(Router B)收到;
Step2:隨后,Router B在t3時(shí)刻返回NTP報(bào)文,并加入t2/t3值。
Step3:Router A在t4時(shí)刻收到并記錄t4時(shí)刻值。
Step4:Router B可計(jì)算傳輸延時(shí)△t=[(t2-t1)+(t4-t3)]/2(默認(rèn)往返延時(shí)相同)。
Step5:同時(shí)Router B可校準(zhǔn)時(shí)鐘偏差offset=t4-t3- △t
PTP時(shí)間同步過(guò)程如下:
Step1:t1時(shí)刻Master(Router A)發(fā)送同步報(bào)文信號(hào)Sync,該報(bào)文數(shù)據(jù)在t2時(shí)刻被Slave(Router B)收到;
Step2:幾乎同時(shí),Router A發(fā)送跟隨報(bào)文FUP,將時(shí)刻t1時(shí)間值告知Router B。
Step3:隨后,Router B在t3時(shí)刻發(fā)送DelayReq報(bào)文,該報(bào)文數(shù)據(jù)在t4時(shí)刻被Router B收到。
Step4:幾乎同時(shí),Router A隨后發(fā)送DelayResp報(bào)文,將時(shí)刻t4時(shí)間值告知Router B。
從鐘根據(jù) t1 、 t2 、 t3 、 t4 計(jì)算時(shí)間偏移 (offset) 以及傳輸延時(shí) ( delay) ,即 t2 -t1 = offset + delay t4 - t3 = delay - offset 計(jì)算出 delay = ( t4 - t3 + t2 - t1) / 2 offset = ( t2 - t1 - t4 + t3) / 2 ,從中根據(jù) offset 從鐘可以調(diào)整自己的時(shí)鐘。
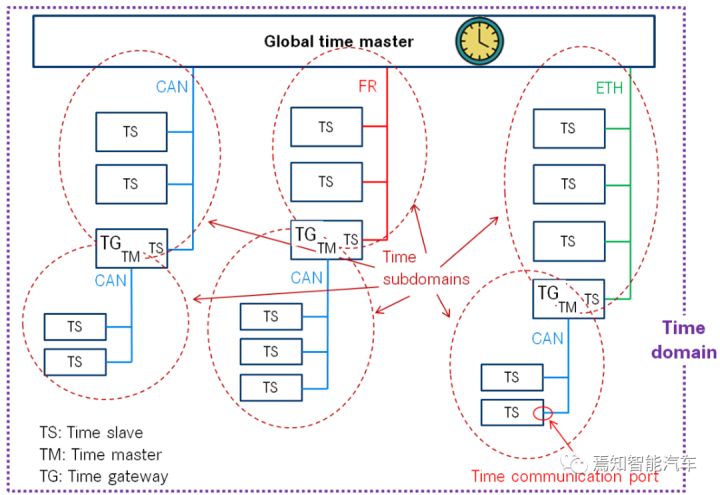
基于Autosar的時(shí)間同步
在Autosar的軟件架構(gòu)中進(jìn)行同步的過(guò)程需要理清兩個(gè)比較重要的術(shù)語(yǔ)。其一是時(shí)間主站Time Master是一個(gè)實(shí)體,它是某個(gè)時(shí)基的主站,并將該時(shí)基傳播到通信網(wǎng)絡(luò)某個(gè)段內(nèi)的一組時(shí)基,作為該時(shí)基的源。如果時(shí)間主站也是全局基準(zhǔn)時(shí)間的所有者,所有其他時(shí)基都來(lái)自該時(shí)基,那么它就是全局時(shí)間主站。時(shí)間網(wǎng)關(guān)通常由一個(gè)連接到一個(gè)或多個(gè)時(shí)間從站的時(shí)間主站端口組成。當(dāng)將時(shí)間實(shí)體映射到真實(shí)的 ECU 時(shí),必須注意,一個(gè) ECU 可以是一個(gè)時(shí)基的時(shí)間主站(甚至全局時(shí)間主站)和另一個(gè)時(shí)基的時(shí)間從站。
總體來(lái)說(shuō),AUTOSAR完全通過(guò)CAN/ETH通訊進(jìn)行,假設(shè)在Autsosar軟件架構(gòu)下通信的兩個(gè)終端ECU分別為兩大不同域端控制器,其一是自動(dòng)駕駛域控制器HPC,其二是車(chē)身區(qū)域控制器PDC,假設(shè)由自動(dòng)駕駛域控制器HPC接收世界時(shí)鐘,并對(duì)PDC進(jìn)行時(shí)間同步。
其中進(jìn)行時(shí)間同步的原理需要滿(mǎn)足如下過(guò)程:
Step1:HPC在t0時(shí)刻HPC接收發(fā)送當(dāng)下的UTC時(shí)間,并于t1時(shí)刻發(fā)送給PDC,PDC于t2時(shí)刻收到該時(shí)間戳信息;
Step2:然后HPC計(jì)算跟隨時(shí)間戳信息FUP并發(fā)送Δt=t1-t0給PDC;
Step3:PDC于t3時(shí)刻收到該時(shí)間戳信息,并計(jì)算兩次報(bào)文的時(shí)間差Δt’=t3-t2;
Step4:PDC在時(shí)間戳t3時(shí)刻通過(guò)計(jì)算當(dāng)下的時(shí)間=(t3-t2)+t1,隨機(jī)每隔一段時(shí)間進(jìn)行一次同步;
如上簡(jiǎn)單描述了整個(gè)Autosar簡(jiǎn)單的同步過(guò)程,后續(xù)文章將單獨(dú)針對(duì)這一塊進(jìn)行詳細(xì)的過(guò)程說(shuō)明。
域控內(nèi)部芯片時(shí)間同步
域控內(nèi)部芯片的時(shí)間同步通常是將域控區(qū)分成各種不同功能的模塊進(jìn)行,比如針對(duì)SOC來(lái)說(shuō),主要是負(fù)責(zé)進(jìn)行相應(yīng)的圖像智能識(shí)別和處理,其中包含深度神經(jīng)網(wǎng)絡(luò)。這里我們舉出一種簡(jiǎn)單的例子進(jìn)行說(shuō)明。
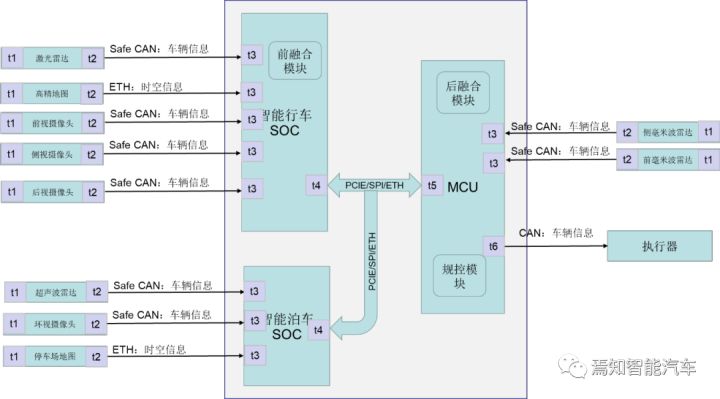
假設(shè)我們?cè)谙乱淮詣?dòng)駕駛系統(tǒng)中,設(shè)計(jì)成了相應(yīng)的行泊一體控制器。其中包含智能行車(chē)處理芯片單元,這里假設(shè)我們采用英偉達(dá)已經(jīng)量產(chǎn)的較大算力Xavier來(lái)進(jìn)行深度神經(jīng)網(wǎng)絡(luò)處理,采用英飛凌MCU芯片TC397來(lái)進(jìn)行邏輯算力的計(jì)算,而對(duì)于泊車(chē)模塊可采用德州儀器的TDA4來(lái)進(jìn)行相應(yīng)的泊車(chē)信息處理。
如上如表示了目前在研的高階自動(dòng)駕駛系統(tǒng)的域控傳輸信息同步過(guò)程內(nèi)部架構(gòu),其中主要包含攝像頭、毫米波雷達(dá)、激光雷達(dá)、高精地圖、超聲波雷達(dá)幾類(lèi)。各個(gè)傳感器在對(duì)目標(biāo)檢測(cè)和發(fā)送過(guò)程中存在時(shí)間延遲,到達(dá)域控制器芯片的傳感器信號(hào)需要在芯片上進(jìn)行時(shí)間同步。
其中參照如上圖中的基本連接方式,目標(biāo)信息及車(chē)輛動(dòng)信息通過(guò)CAN或LVDS傳入域控,最終智能行車(chē)目標(biāo)信息會(huì)在SOC(Xavier)中進(jìn)行目標(biāo)前融合,智能泊車(chē)信息會(huì)在SOC(TDA4)中進(jìn)行前融合,而最終所有傳感器信息則會(huì)在MCU(TC397)中進(jìn)行目標(biāo)后融合。同時(shí),在軌跡規(guī)劃中也會(huì)在收到最終的融合數(shù)據(jù)時(shí),根據(jù)不同的目標(biāo)大融合信息進(jìn)行軌跡規(guī)劃和預(yù)測(cè)。因此,對(duì)于域控制器來(lái)說(shuō),需要在終端芯片上分別進(jìn)行時(shí)間同步。同步過(guò)程如下:
Step1:在t1時(shí)刻傳感器探測(cè)到目標(biāo)。其中,攝像頭是指該幀曝光的時(shí)刻,而雷達(dá)是指接收到回波的時(shí)刻;
Step2:在t2時(shí)刻各傳感器發(fā)出檢測(cè)到的目標(biāo)信息;
Step3:在t3時(shí)刻各內(nèi)部芯片接收到傳感器發(fā)出的檢測(cè)信息,然后在t3-t4時(shí)間段內(nèi),智能行車(chē)和智能泊車(chē)芯片將各自進(jìn)行信息前融合;
Step4:在t4時(shí)刻智能行車(chē)和智能泊車(chē)芯片SOC發(fā)出相應(yīng)的前融合信息給MCU芯片進(jìn)行后融合和軌跡規(guī)劃;
Step5:在t5時(shí)刻,MCU將最終收到智能行車(chē)芯片(Xavier)和智能泊車(chē)芯片(TDA4)發(fā)出的前融合信息。然后在t5-t6時(shí)間段內(nèi),MCU將根據(jù)接收到的環(huán)境傳感信息進(jìn)行軌跡規(guī)劃和行為預(yù)測(cè);
Step6:在t6時(shí)刻,MCU將最終預(yù)測(cè)的軌跡和規(guī)劃的決策控制指令發(fā)送給執(zhí)行器進(jìn)行控制執(zhí)行。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 114



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車(chē)操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車(chē)異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車(chē)大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車(chē)大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評(píng)價(jià)開(kāi)始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
