




 廣告
廣告





















































首頁 > 汽車測試技術(shù) > 正文
自動駕駛運(yùn)動規(guī)劃(Motion Planning)-車輛運(yùn)動學(xué)模型
2020-01-19 19:03:02· 來源:半杯茶的小酒杯

要控制車輛的運(yùn)動,首先要對車輛的運(yùn)動建立數(shù)字化模型,模型建立的越準(zhǔn)確,對車輛運(yùn)動的描述越準(zhǔn)確,對車輛的跟蹤控制的效果就越好。除了真實反映車輛特性外,建
要控制車輛的運(yùn)動,首先要對車輛的運(yùn)動建立數(shù)字化模型,模型建立的越準(zhǔn)確,對車輛運(yùn)動的描述越準(zhǔn)確,對車輛的跟蹤控制的效果就越好。除了真實反映車輛特性外,建立的模型也應(yīng)該盡可能的簡單易用。自行車模型(Bicycle Model)是一種常見的車輛運(yùn)動學(xué)模型。
自行車模型(Bicycle Model)的建立基于如下假設(shè):
1)不考慮車輛在垂直方向(Z軸方向)的運(yùn)動,即假設(shè)車輛的運(yùn)動是一個二維平面上的運(yùn)動。
2) 假設(shè)車輛左右側(cè)輪胎在任意時刻都擁有相同的轉(zhuǎn)向角度和轉(zhuǎn)速;這樣車輛的左右兩個輪胎的運(yùn)動可以合并為一個輪胎來描述。
3)假設(shè)車輛行駛速度變化緩慢,忽略前后軸載荷的轉(zhuǎn)移。
4) 假設(shè)車身和懸架系統(tǒng)都是剛性系統(tǒng)。
5)假設(shè)車輛的運(yùn)動和轉(zhuǎn)向是由前輪驅(qū)動(front−wheel−only)的。
1、以后軸為原點(diǎn)的車輛運(yùn)動模型

自動駕駛中的車輛模型可以簡化為二維平面上運(yùn)動的剛體結(jié)構(gòu),任意時刻車輛的狀態(tài),車輛坐標(biāo)的原點(diǎn)位于后軸的中心位置,坐標(biāo)軸與車身平行。s表示車輛的速度,表示steering angle(左為正,右為負(fù)),L表示前輪和后輪的距離,如果steering angle保持不變,車輛就會在原地轉(zhuǎn)圈,半徑為。
車輛運(yùn)動模型:
在一個非常短的時間內(nèi),可以近似認(rèn)為車輛按照車身的方向運(yùn)動,、表示在時間內(nèi)車輛在x軸、y軸移動的距離。
由
可以推出:
用表示時間內(nèi)車身運(yùn)動的距離,于是由
可以推出:
對等式兩側(cè)除以,并且基于
的條件可以最終得到等式:
至此一個簡化的非完整約束的車輛運(yùn)動模型完成了,匯總?cè)缦?
基于這個簡單的運(yùn)動學(xué)模型,在給定了某個時刻的控制輸入(a, )以后,我們就可以估算車輛在下一時刻的狀態(tài)信息(坐標(biāo),偏航角以及速度)。
2、以質(zhì)心為中心的車輛運(yùn)動學(xué)模型

其中A點(diǎn)是前輪,B是后輪,C為車輛質(zhì)心點(diǎn),O為OA、OB的交點(diǎn),是車輛的瞬時滾動中心,線段OA、OB分別垂直于兩個滾動輪的方向;為滑移角(Tire Slip Angle),指車輛行進(jìn)方向和輪圈所指方向兩者間所成的角度;為航向角(Heading Angle),指車身與X軸的夾角。
符號定義符號定義A前輪中心B后輪中心C車輛質(zhì)心O轉(zhuǎn)向圓心
后懸長度
前懸長度V質(zhì)心車速R轉(zhuǎn)向半徑
滑移角
航向角
后輪偏角
前輪偏角

展開公式(1.1)(1.2)可得:

聯(lián)立公式(1.3)(1.4)可得:

低速環(huán)境下,車輛行駛路徑的轉(zhuǎn)彎半徑變化緩慢,此時我們可以假設(shè)車輛的方向變化率等于車輛的角速度。則車輛的角速度為:

聯(lián)立公式(1.5)(1.6)可得:

則在慣性坐標(biāo)系XY下,可得車輛運(yùn)動學(xué)模型:

此模型中有三個輸入:、、和V。
滑移角可由公式(1.3)(1.4)求得:

作為一種自行車模型,運(yùn)動學(xué)自行車模型也假定車輛形如一輛自行車,整個的控制量可以簡化為,其中a是車輛的加速度,踩油門踏板意味著正的加速度;踩剎車踏板意味著負(fù)的加速度; 是方向盤轉(zhuǎn)角。
前輪驅(qū)動的車輛運(yùn)動模型

當(dāng)車輛為前輪驅(qū)動(front−wheel−only)時,可假設(shè)恒為0,同時由于我們假設(shè)汽車是前輪驅(qū)動的,所以我們認(rèn)為方向盤的轉(zhuǎn)角就等于前輪的轉(zhuǎn)角。此時,車輛運(yùn)動學(xué)公式如下:

3、阿克曼轉(zhuǎn)向幾何(Ackerman turning geometry)
阿克曼轉(zhuǎn)向幾何(Ackerman Turning Geometry)是一種為了解決交通工具轉(zhuǎn)彎時,內(nèi)外轉(zhuǎn)向輪路徑指向的圓心不同的幾何學(xué)。
在單車模型中,將轉(zhuǎn)向時左/右前輪偏角假設(shè)為同一角度,雖然通常兩個角度大致相等,但實際并不是,通常情況下,內(nèi)側(cè)輪胎轉(zhuǎn)角更大。如下圖所示。
阿克曼轉(zhuǎn)向幾何
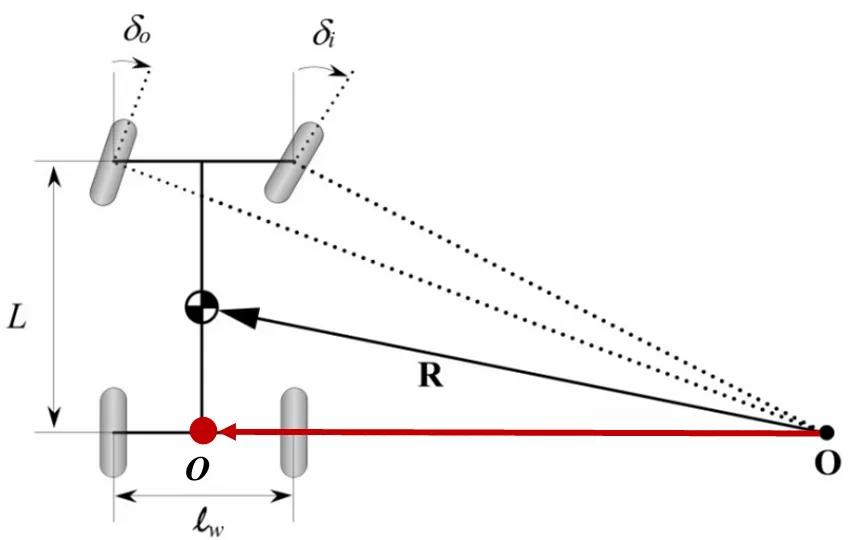
和分別為外側(cè)前輪和內(nèi)側(cè)前輪偏角,當(dāng)車輛右轉(zhuǎn)時,右前輪胎為內(nèi)側(cè)輪胎,其轉(zhuǎn)角較左前輪胎轉(zhuǎn)角更大。為輪距,L為軸距,后輪兩輪胎轉(zhuǎn)角始終為0°。當(dāng)以后軸中心為參考點(diǎn)時,圖中紅線為轉(zhuǎn)向半徑R。
當(dāng)滑移角很小時,且后輪偏角為0時,公式(1.7)可表述為:
由于內(nèi)外側(cè)輪胎的轉(zhuǎn)向半徑不同,因此有:
則前輪平均轉(zhuǎn)角:
內(nèi)外轉(zhuǎn)角之差:
因此,兩個前輪的轉(zhuǎn)向角的差異與平均轉(zhuǎn)向角的平方成正比。
依據(jù)阿克曼轉(zhuǎn)向幾何設(shè)計的車輛,沿著彎道轉(zhuǎn)彎時,利用四連桿的相等曲柄使內(nèi)側(cè)輪的轉(zhuǎn)向角比外側(cè)輪大大約2~4度,使四個輪子路徑的圓心大致上交會于后軸的延長線上瞬時轉(zhuǎn)向中心,讓車輛可以順暢的轉(zhuǎn)彎。




 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評價開始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
