




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
Mobileye 自動(dòng)駕駛
2020-06-25 10:56:29· 來(lái)源:英特爾中國(guó)

對(duì)于自動(dòng)駕駛這種未來(lái)詞匯而言,很多人的感受可能都來(lái)自于科幻電影中的橋段。而現(xiàn)實(shí)中,人們能夠體驗(yàn)的自動(dòng)駕駛場(chǎng)景,基本還是類(lèi)似ACC自適應(yīng)巡航這些輔助駕駛的
對(duì)于自動(dòng)駕駛這種“未來(lái)詞匯”而言,很多人的感受可能都來(lái)自于科幻電影中的橋段。
而現(xiàn)實(shí)中,人們能夠體驗(yàn)的“自動(dòng)駕駛”場(chǎng)景,基本還是類(lèi)似ACC自適應(yīng)巡航這些輔助駕駛的功能,通過(guò)汽車(chē)裝載的雷達(dá)以及攝像頭,來(lái)實(shí)現(xiàn)定速巡航、車(chē)距車(chē)道保持以及方向調(diào)整等操作,來(lái)減緩駕駛員疲勞。
光說(shuō)不練假把式??!本來(lái)人們對(duì)于這種未來(lái)技術(shù)就有很大的疑慮,在標(biāo)志清晰、道路條件優(yōu)越并且單向行駛的高速上實(shí)現(xiàn)“低階”自動(dòng)駕駛的難度系數(shù)并不大,如何應(yīng)對(duì)復(fù)雜城市道路以及各種隨時(shí)發(fā)生的突發(fā)情況才是真正的考驗(yàn)。

一直以來(lái),對(duì)于自動(dòng)駕駛而言,技術(shù)上的問(wèn)題可能并不是主要的,信任或許是這項(xiàng)“未來(lái)技術(shù)”在實(shí)踐中面臨的最大的難題。那個(gè)看不見(jiàn)的“駕駛員”想要獲得大家的信任,本身就是一件很難的事情:把自己的生命托付給你一個(gè)不認(rèn)識(shí)、看不見(jiàn)摸不著的“司機(jī)”,這事兒真的靠譜嗎?
英特爾旗下Mobileye用一段自動(dòng)駕駛汽車(chē)上路全程紀(jì)實(shí)的視頻給出了自己的回答。
市區(qū)連續(xù)行駛 257KM
只為告訴你:靠譜
前不久,Mobileye公布一段全程紀(jì)實(shí)的視頻,記錄了Mobileye的自動(dòng)駕駛汽車(chē)在耶路撒冷街道上連續(xù)行駛160英里(約257公里)期間的情景。

通過(guò)一架無(wú)人機(jī)來(lái)跟蹤拍攝,最后,加上駕駛位的攝像頭視角,以及車(chē)輛行進(jìn)的3D地圖,三位一體的展示了英特爾的自動(dòng)駕駛汽車(chē)是如何在更為復(fù)雜的城市道路中實(shí)現(xiàn)無(wú)人工干預(yù)行駛257公里的,以及面對(duì)動(dòng)態(tài)變化的復(fù)雜路況的時(shí)候,“駕駛員”是如何決策的。

和在高速路上實(shí)現(xiàn)的自動(dòng)駕駛不同,在這段視頻中我們可以看到非常復(fù)雜的城市自動(dòng)駕駛場(chǎng)景:
無(wú)保護(hù)左轉(zhuǎn)、被迫超車(chē)、十字路口禮讓行人、識(shí)別路邊停泊的車(chē)輛并提前變道等在城市道路經(jīng)常會(huì)遇到的各種情況,相信新手司機(jī)們都深有體會(huì)。
來(lái),我們一起來(lái)看看Mobileye是怎么做的。
復(fù)雜路況1:無(wú)保護(hù)左轉(zhuǎn)
只要涉及到轉(zhuǎn)向的操作,對(duì)于新手司機(jī)而言就是一個(gè)考驗(yàn)。特別是在更為復(fù)雜的城市道路中,除了交通信號(hào)燈,還有各方的車(chē)輛情況。
Mobileye面臨的就是這樣一個(gè)復(fù)雜道路環(huán)境下的左轉(zhuǎn)情況,對(duì)向來(lái)車(chē),測(cè)試車(chē)輛想讓路,但在行經(jīng)路線(xiàn)(右側(cè))上停滿(mǎn)了車(chē)輛。
主動(dòng)偏離設(shè)定路線(xiàn),為來(lái)車(chē)讓行
一旦有車(chē)讓行,能夠迅速完成轉(zhuǎn)向
這時(shí)候,測(cè)試車(chē)輛的決策是:
把行經(jīng)路線(xiàn)向前挪了一點(diǎn),一旦有機(jī)會(huì),就能夠迅速實(shí)現(xiàn)轉(zhuǎn)向。
Mobileye自動(dòng)駕駛汽車(chē)連續(xù)行駛257公里,部分紀(jì)實(shí)
復(fù)雜路況2:人車(chē)混走的單行道
在城市里開(kāi)車(chē),經(jīng)常會(huì)遇到的情況就是當(dāng)你一不小心駛?cè)胍粭l很老的道路或者一些比較老舊的小區(qū)的內(nèi)部道路,狹窄的道路以及人車(chē)混走的情況讓你不得不打起12分的精神來(lái)應(yīng)對(duì)。
Mobileye的測(cè)試車(chē)輛就面臨這種情況,駛?cè)肓艘粭l非常狹窄的單行道:右側(cè)停滿(mǎn)車(chē)輛,僅剩左側(cè)的狹窄道路通行,并且有大量行人。
攝像頭會(huì)預(yù)判人的行為軌跡
這個(gè)時(shí)候,自動(dòng)駕駛車(chē)輛的策略是:
通過(guò)視距攝像頭,來(lái)檢測(cè)行人,并等待看他是否要穿過(guò)馬路。一旦系統(tǒng)判斷這個(gè)人并不打算過(guò)馬路,自動(dòng)駕駛車(chē)輛就會(huì)繼續(xù)行進(jìn)。

前方司機(jī)表示:這里太窄了,可以檢測(cè)到他的車(chē)門(mén)打開(kāi)
在左上角的屏幕中,你可以看到傳感器對(duì)于行人的判斷以及顏色代碼進(jìn)行相應(yīng)的變化。
Mobileye自動(dòng)駕駛汽車(chē)連續(xù)行駛257公里,部分紀(jì)實(shí)
復(fù)雜路況3:駛?cè)氕h(huán)島
環(huán)島路況是一個(gè)不管新老司機(jī)都非常緊張的駕駛環(huán)境,不僅各個(gè)方向都有駛?cè)胍呀?jīng)行駛的車(chē)輛,而且很容易走錯(cuò)。
在耶路撒冷,測(cè)試車(chē)輛就遇到了一個(gè)多車(chē)道環(huán)島路口,而且交通非常擁擠、環(huán)境復(fù)雜。即使是人類(lèi)駕駛者走這個(gè)路口也是比較難的。
自動(dòng)駕駛車(chē)輛果斷、安全的擠出路口,
甚至同時(shí)還能注意避讓行人。
復(fù)雜路況4:禮讓行人
斑馬線(xiàn)禮讓行人,這是非?;镜男熊?chē)禮儀,人類(lèi)駕駛員也能夠很好的做到這一點(diǎn)。但是Mobileye的測(cè)試車(chē)輛的預(yù)判以及決策可以做到更好。

在駛出環(huán)島的路口,自動(dòng)駕駛測(cè)試車(chē)輛遇到了斑馬線(xiàn),攝像頭很早(行人未踏入車(chē)道斑馬線(xiàn))就捕捉到了行人過(guò)馬路的動(dòng)作,提前進(jìn)行了停車(chē)讓行。
靠譜的背后
怎樣?在英特爾的自動(dòng)駕駛車(chē)輛在耶路撒冷完成了這么多的高難度動(dòng)作之后,你有沒(méi)有對(duì)自動(dòng)駕駛有更全面的認(rèn)知?對(duì)于那個(gè)咱們看不見(jiàn)的“老司機(jī)”有沒(méi)有增多一層信任呢?如果還想體驗(yàn)一下和它一起共度257公里,那不妨用以下視頻第一視角感受一下。
Mobileye自動(dòng)駕駛汽車(chē)連續(xù)行駛257公里,部分紀(jì)實(shí)
這一切,離不開(kāi)Mobileye多年的技術(shù)研究和布局。
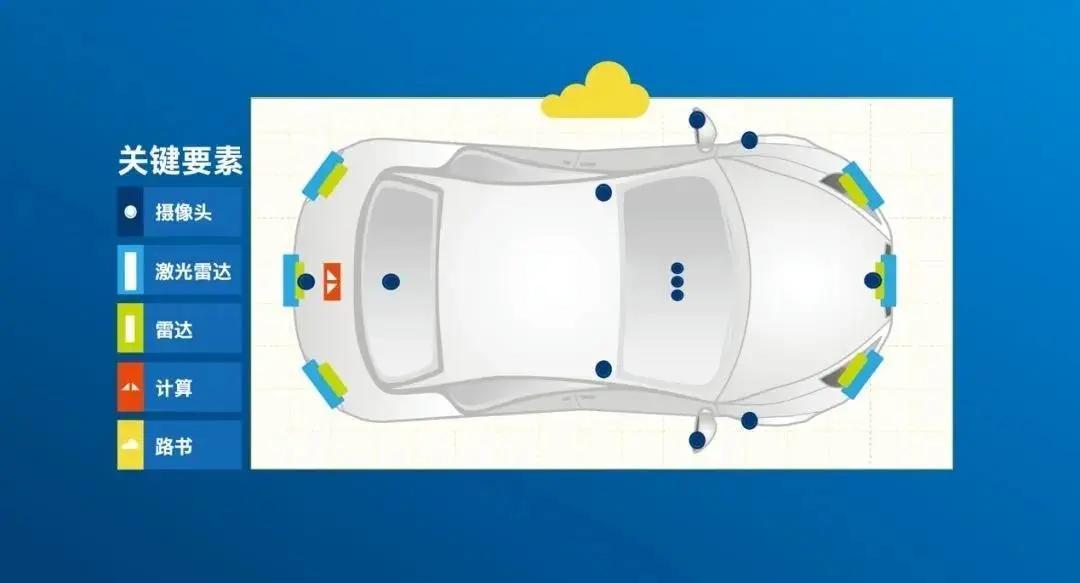
感知系統(tǒng)冗余
我們知道,自動(dòng)駕駛的感知系統(tǒng)通常由攝像頭、雷達(dá)和激光雷達(dá)構(gòu)成,再且通過(guò)軟件將傳感器的原始數(shù)據(jù)轉(zhuǎn)換為“環(huán)境模型”,這其中還需要特別包括其他道路使用者的位置和速度。
大部分的自動(dòng)駕駛汽車(chē)廠(chǎng)商采用的都是這種傳感器融合的處理感知系統(tǒng),在只有一個(gè)系統(tǒng)的情況下,即使幾率極小,但是感知系統(tǒng)仍然會(huì)在某種特定情況下忽略掉道路使用者和無(wú)生命障礙物等在內(nèi)的相關(guān)物體的存在,或是錯(cuò)誤地計(jì)算其尺寸,從而引發(fā)事故。
增加更多的傳感器貌似是一個(gè)可用的解決方案,但是Mobileye想了一個(gè)更聰明的辦法,來(lái)降低意外發(fā)生的概率:雙子系統(tǒng)冗余設(shè)計(jì)。
簡(jiǎn)單說(shuō)來(lái),就是一臺(tái)車(chē)上基于攝像頭來(lái)構(gòu)建一套完整的端到端自動(dòng)駕駛,再使用雷達(dá)/激光雷達(dá)構(gòu)建完全獨(dú)立的系統(tǒng)。如此一來(lái),產(chǎn)生的冗余就能讓我們把犯錯(cuò)幾率分布到兩個(gè)系統(tǒng)當(dāng)中去。因此,通過(guò)擁有兩個(gè)獨(dú)立的子系統(tǒng)來(lái)實(shí)現(xiàn)非常低的出錯(cuò)概率。這樣一來(lái),安全性能夠得到大幅提升,因?yàn)槿绻粋€(gè)分系統(tǒng)犯了錯(cuò),還有另一個(gè)系統(tǒng)進(jìn)行兜底。

事實(shí)上,建一個(gè)純攝像頭的自動(dòng)駕駛汽車(chē)要困難得多。眾所周知,攝像頭很難被利用,因?yàn)樗鼘?duì)深度(范圍)的訪(fǎng)問(wèn)是間接的,是建立在諸如透視、陰影、運(yùn)動(dòng)和幾何形狀這樣的線(xiàn)索之上的。
但是在視頻中,Mobileye的自動(dòng)駕駛車(chē)輛車(chē)?yán)锛葲](méi)有雷達(dá)也沒(méi)有激光雷達(dá),實(shí)際上,這輛車(chē)由8個(gè)遠(yuǎn)距攝像頭和4個(gè)停車(chē)攝像頭提供感知支持,這些攝像頭的信息被輸入到僅由兩個(gè)EyeQ®5芯片支持的計(jì)算系統(tǒng)中。
在展示汽車(chē)行進(jìn)的地圖顯示屏上,我們可以清楚的看到,所有的車(chē)輛和行人,不光做了識(shí)別分類(lèi),給出了3D的Bounding Box,還預(yù)測(cè)了每輛汽車(chē)和行人的路徑,準(zhǔn)確度和實(shí)時(shí)性讓人吃驚。
責(zé)任敏感安全模型(RSS)
要讓“老司機(jī)”更加靠譜,除了依靠系統(tǒng)級(jí)的冗余設(shè)計(jì),安全策略也是極為重要的。“駕駛員”如何通過(guò)眼睛以及傳感器獲取的信息來(lái)判斷駕駛的狀態(tài)和策略至關(guān)重要。
Mobileye的責(zé)任敏感安全模型(RSS)主要圍繞駕駛員的實(shí)際操作展開(kāi),通過(guò)諸如“路權(quán)是被賦予的,而不是爭(zhēng)奪來(lái)的”這樣的概念來(lái)建立度量參數(shù),以便讓自動(dòng)駕駛汽車(chē)做出安全的決策。
RSS模型在可供假設(shè)的范圍內(nèi)假定了最壞的情況,即其他道路使用者會(huì)做出的最糟糕的動(dòng)作是什么。這樣一來(lái),自動(dòng)駕駛車(chē)輛就不再需要對(duì)其他道路使用者的行為進(jìn)行預(yù)測(cè)了。
RSS的理論證明,如果自動(dòng)駕駛汽車(chē)遵循該理論所規(guī)定的假設(shè)和行為,那么自動(dòng)駕駛汽車(chē)的決策大腦就永遠(yuǎn)不會(huì)造成事故。也是從那時(shí)起,RSS在全球范圍內(nèi)得到了推廣。
總的來(lái)說(shuō), 自動(dòng)駕駛的落地需要分階段實(shí)施。在數(shù)據(jù)積累的高精地圖和RSS系統(tǒng)支持下,可以在限定區(qū)域內(nèi)開(kāi)展運(yùn)行和試點(diǎn)。

盡管如此,Mobileye基于強(qiáng)大技術(shù)能力與技術(shù)儲(chǔ)備,通過(guò)極具前瞻性的構(gòu)想,讓自動(dòng)駕駛的車(chē)輛能夠在更為復(fù)雜的市內(nèi)公共交通區(qū)域長(zhǎng)距離行進(jìn),并且留下了美妙的體驗(yàn)。
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 56



 廣告
廣告 編輯推薦




最新資訊
-
開(kāi)年豪擲1.8億搶用戶(hù),又一車(chē)企加入“價(jià)格
2026-03-04 16:05
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車(chē)操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車(chē)異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車(chē)大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車(chē)大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
