




 廣告
廣告





















































首頁(yè) > 汽車(chē)技術(shù) > 正文
面向自動(dòng)駕駛:四輪獨(dú)立驅(qū)動(dòng)/轉(zhuǎn)向電動(dòng)汽車(chē)配置與控制綜述與展望
2021-11-23 20:39:55· 來(lái)源:同濟(jì)智能汽車(chē)研究所

編者按:自動(dòng)駕駛技術(shù)不僅可以減小駕駛員的負(fù)擔(dān),還可以提高行駛安全性,減少交通事故的發(fā)生。然而,傳統(tǒng)的燃料汽車(chē)由于其復(fù)雜的驅(qū)動(dòng)和傳動(dòng)系統(tǒng)具有響應(yīng)速度慢、
編者按:自動(dòng)駕駛技術(shù)不僅可以減小駕駛員的負(fù)擔(dān),還可以提高行駛安全性,減少交通事故的發(fā)生。然而,傳統(tǒng)的燃料汽車(chē)由于其復(fù)雜的驅(qū)動(dòng)和傳動(dòng)系統(tǒng)具有響應(yīng)速度慢、控制精度低的缺點(diǎn),不能及時(shí)有效地執(zhí)行自動(dòng)駕駛系統(tǒng)中的決策命令。相比之下,電動(dòng)汽車(chē)由于更容易實(shí)現(xiàn)精確控制從而受到更多研究人員的青睞。本文從自動(dòng)駕駛角度出發(fā),綜述了四輪獨(dú)立驅(qū)動(dòng)/轉(zhuǎn)向電動(dòng)汽車(chē)(4WID-4WIS EV)的底盤(pán)配置和控制技術(shù),還包括4WID-4WIS EV樣機(jī)展示和性能分析等。最后針對(duì)4WID-4WIS EV的成本、線(xiàn)性模塊集成技術(shù)和控制技術(shù)等方面的難點(diǎn)提出了一些展望。
本文譯自:
《Towards
Autonomous Driving: Review and Perspectives on Configuration and
Control of Four-Wheel Independent Drive/Steering Electric Vehicles》
文章來(lái)源:
Multidisciplinary Digital Publishing Institute,Actuators2021,10, 184.
作者:
Peng Hang,Xinbo Chen
原文鏈接:
http://www.mdpi.com/2076-0825/10/8/184
摘要:本文對(duì)四輪獨(dú)立驅(qū)動(dòng)/轉(zhuǎn)向電動(dòng)汽車(chē)(4WID-4WIS EV)的底盤(pán)配置和控制系統(tǒng)的相關(guān)研究進(jìn)行了綜述和討論。首先,本文介紹了4WID-4WIS EV的一些樣機(jī)和線(xiàn)控集成模塊,并對(duì)4WID-4WIS EV的底盤(pán)配置進(jìn)行分析。然后總結(jié)了4WID-4WIS EV常用的控制模型,即動(dòng)力學(xué)模型、運(yùn)動(dòng)學(xué)模型和路徑跟蹤模型。此外,介紹并討論了4WID-4WIS EV的控制框架、控制策略和算法,包括穩(wěn)定性控制、防側(cè)傾控制、路徑跟蹤控制和主動(dòng)容錯(cuò)控制。最后,從自動(dòng)駕駛的角度討論了4WID-4WIS EV面臨的挑戰(zhàn)和發(fā)展前景。
關(guān)鍵詞:自動(dòng)駕駛;四輪獨(dú)立驅(qū)動(dòng);四輪獨(dú)立轉(zhuǎn)向;路徑跟蹤;操縱穩(wěn)定性;主動(dòng)安全控制;電動(dòng)汽車(chē)
1 引言
自動(dòng)駕駛技術(shù)不僅可以減小駕駛員的負(fù)擔(dān),還可以提高行駛安全性,減少交通事故的發(fā)生。并且為了實(shí)現(xiàn)零排放目標(biāo)和減小空氣污染,電動(dòng)汽車(chē)(EV)相較于傳統(tǒng)的燃料汽車(chē)有更好的控制性能。因此,自動(dòng)駕駛汽車(chē)(AV)和電動(dòng)汽車(chē)在汽車(chē)的開(kāi)發(fā)中成為熱門(mén)話(huà)題[1-3]。
近年來(lái),絕大多數(shù)自動(dòng)駕駛汽車(chē)是基于傳統(tǒng)的燃料汽車(chē)平臺(tái)研究和開(kāi)發(fā)的,如百度、Waymo,Uber等等。這些所謂的自動(dòng)駕駛汽車(chē)是在現(xiàn)有的商用車(chē)輛上應(yīng)用先進(jìn)的感知傳感器、決策和控制系統(tǒng)[4]。絕大多數(shù)的自動(dòng)駕駛公司不是整車(chē)制造商,它們并不能將自動(dòng)駕駛技術(shù)整合到自動(dòng)駕駛平臺(tái)設(shè)計(jì)中,這限制了自動(dòng)駕駛汽車(chē)的商業(yè)化發(fā)展[5]。實(shí)際上,傳統(tǒng)的燃料汽車(chē)并不是最好的自動(dòng)駕駛平臺(tái),其復(fù)雜的驅(qū)動(dòng)和傳動(dòng)系統(tǒng)(內(nèi)燃機(jī)、變矩器等)具有響應(yīng)速度慢,控制精度低的缺點(diǎn)[6]。相比之下,電動(dòng)汽車(chē)受到更多研究人員的青睞,因?yàn)槠錄](méi)有復(fù)雜的驅(qū)動(dòng)和傳動(dòng)系統(tǒng),更容易實(shí)現(xiàn)精確的控制[7],可以更好地執(zhí)行自動(dòng)駕駛系統(tǒng)中的決策命令[8]。因此,針對(duì)于未來(lái)的自動(dòng)駕駛、自動(dòng)移動(dòng)平臺(tái)正在被廣泛研究,包括舍弗勒,Protean等[9-11]。在自動(dòng)移動(dòng)平臺(tái)中,線(xiàn)控底盤(pán)(X-by-wire)技術(shù)對(duì)于精確控制成為關(guān)鍵問(wèn)題[12, 13]。
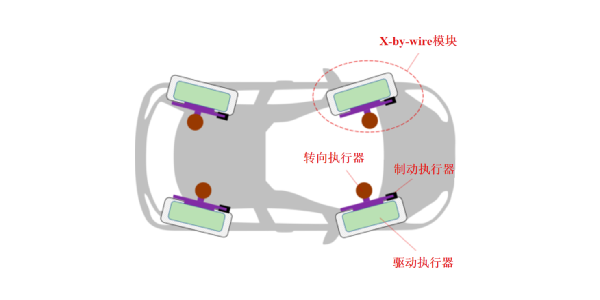
傳統(tǒng)的汽車(chē)普遍采用集中的驅(qū)動(dòng)系統(tǒng)和前輪轉(zhuǎn)向系統(tǒng)(FWS)的底盤(pán)配置。隨著底盤(pán)模塊化和電動(dòng)化的發(fā)展,眾多人員著力研究X-by-wire模塊,轉(zhuǎn)向系統(tǒng)、驅(qū)動(dòng)系統(tǒng)和制動(dòng)系統(tǒng)都可以采用線(xiàn)控的方式[14]。這些與汽車(chē)懸架結(jié)合并且構(gòu)成一個(gè)完整的底盤(pán)模塊,這有利于根據(jù)不同需求對(duì)底盤(pán)進(jìn)行改造[15]。采用X-by-wire模塊,車(chē)輛可以輕易地實(shí)現(xiàn)精確的動(dòng)態(tài)控制以提高主動(dòng)安全性[16]。四個(gè)X-by-wire模塊組成了四輪獨(dú)立驅(qū)動(dòng)/轉(zhuǎn)向電動(dòng)汽車(chē)(4WID-4WIS EV),其轉(zhuǎn)向角和驅(qū)動(dòng)/制動(dòng)力矩可以被獨(dú)立控制[17]。因此,4WID-4WIS EV可以輕易實(shí)現(xiàn)多目標(biāo)優(yōu)化控制,如操縱穩(wěn)定性控制、防側(cè)翻控制和路徑跟蹤控制[18]。因此,眾多研究人員認(rèn)為4WID-4WIS EV是一個(gè)理想的電動(dòng)汽車(chē)開(kāi)發(fā)平臺(tái)。
近年來(lái),4WID-4WIS EV被廣泛研究。一些整車(chē)廠和大學(xué)設(shè)計(jì)開(kāi)發(fā)了相關(guān)樣機(jī)。此外,還研究了各種控制框架、算法和策略。但是4WID-4WIS EV的關(guān)鍵問(wèn)題并沒(méi)有被解決,這阻礙了其商業(yè)化應(yīng)用的進(jìn)程。針對(duì)自動(dòng)駕駛,本文綜述了4WID-4WIS EV的底盤(pán)配置和控制技術(shù),最后針對(duì)4WID-4WIS EV的技術(shù)難點(diǎn)提出了一些展望。
本文其余部分內(nèi)容如下:第2章介紹并分析了4WID-4WIS EV的底盤(pán)配置,第3章介紹了4WID-4WIS EV的典型控制模塊,第4章綜述了4WID-4WIS EV的控制框架和控制算法,第5章提出了4WID-4WIS EV未來(lái)發(fā)展的挑戰(zhàn)和展望,最后第6章總結(jié)全文。
2 4WID-4WIS EV的底盤(pán)配置
該章節(jié)主要側(cè)重于4WID-4WIS EV底盤(pán)配置分析。首先,將會(huì)介紹4WID-4WIS EV的典型樣機(jī)并分析其配置。然后綜述4WID-4WIS EV的關(guān)鍵部件——X-by-wire模塊,并對(duì)不同模塊進(jìn)行了比較分析。最后分析了4WID-4WIS EV的轉(zhuǎn)向方式,介紹了不同轉(zhuǎn)向方式之間的切換邏輯。
2.1 4WID-4WIS EV的底盤(pán)配置分析

圖1 4WID-4WIS EV的底盤(pán)配置
如圖1所示,4WID-4WIS EV由四個(gè)集成了轉(zhuǎn)向、驅(qū)動(dòng)、制動(dòng)和懸架系統(tǒng)的X-by-wire(線(xiàn)控)模塊組成。線(xiàn)控模塊中包括三種執(zhí)行器:線(xiàn)控轉(zhuǎn)向執(zhí)行器、線(xiàn)控驅(qū)動(dòng)執(zhí)行器和線(xiàn)控制動(dòng)執(zhí)行器。線(xiàn)控轉(zhuǎn)向執(zhí)行器通常與轉(zhuǎn)向主銷(xiāo)集成在一起,該主銷(xiāo)可以是虛擬主銷(xiāo)亦可是懸架系統(tǒng)的一個(gè)部件。與輪輞集成的輪輞電機(jī)通常作為線(xiàn)控驅(qū)動(dòng)執(zhí)行器,與傳統(tǒng)的集中式驅(qū)動(dòng)系統(tǒng)相比,取消了減速器、差速器和半軸。電動(dòng)液力制動(dòng)系統(tǒng)(EHB)和電動(dòng)機(jī)械制動(dòng)系統(tǒng)(EMB)通常作為線(xiàn)控制動(dòng)執(zhí)行器[19-21]。
由于采用X-by-wire模塊,轉(zhuǎn)向角和驅(qū)動(dòng)/制動(dòng)力矩可以被獨(dú)立控制,因此4WID-4WIS EV相比于傳統(tǒng)車(chē)輛有更多的自由度(DOF),這使其有更多的轉(zhuǎn)向和運(yùn)動(dòng)模式。
2.2 4WID-4WIS EV樣機(jī)
近年來(lái),許多公司企業(yè)和大學(xué)正在著力研究4WID-4WIS EV,圖2中展示了一些4WID-4WIS EV樣機(jī)。作為一款外觀前衛(wèi)的車(chē)輛,豐田的Fine-T配備了4WID-4WIS技術(shù),可以實(shí)現(xiàn)原地轉(zhuǎn)向,有利于在狹窄區(qū)域內(nèi)停車(chē)[22]。此外,日產(chǎn)還設(shè)計(jì)了三代4WID-4WIS EV的概念車(chē),即PIVO1,PIVO2和PIVO3[23]。ROboMObil是一款4WID-4WIS自動(dòng)駕駛的電動(dòng)汽車(chē)。隨著4WID-4WIS技術(shù)應(yīng)用,它不僅展現(xiàn)了在低速情況下強(qiáng)大的機(jī)動(dòng)性,如停車(chē),還展現(xiàn)了高速情況下的操縱穩(wěn)定性[24, 25]。DFKI EO Smart 2是一款專(zhuān)門(mén)為巨型城市設(shè)計(jì)的高度靈活的微型概念汽車(chē)。此外,4WID-4WIS可以改變汽車(chē)高度和長(zhǎng)度以進(jìn)一步提高機(jī)動(dòng)性能。除單車(chē)自動(dòng)駕駛外,EO Smart 2還可實(shí)現(xiàn)編隊(duì)自動(dòng)駕駛[26]。通過(guò)智能轉(zhuǎn)角模塊,舍弗勒的Mover可以作為在城市空間中自動(dòng)和可持續(xù)移動(dòng)的解決方案[27]。通過(guò)底盤(pán)配置重構(gòu),舍弗勒的Mover可以應(yīng)用在不同類(lèi)型的車(chē)輛上。除了汽車(chē)公司,一些大學(xué)也開(kāi)發(fā)了一些4WID-4WIS EV樣機(jī),包括吉林大學(xué)[28, 29]、香港中文大學(xué)(CUHK)[30-32]、麻省理工學(xué)院(MIT)[33]、馬來(lái)西亞理工大學(xué)(UTM)[34]、同濟(jì)大學(xué)[35-37]、釜山國(guó)立大學(xué)[38]和愛(ài)荷華州立大學(xué)[39]。

圖2 4WID-4WIS EV樣機(jī) (a) 豐田Fine-T;(b)日產(chǎn)PIVO3; (c)ROboMObil;(d) DFKIEO Smart 2; (e) 舍弗勒Mover;(f) 吉林大學(xué);(g)CUHK OK-1;(h) MIT Hiriko; (i)UTM;(j) 同濟(jì)大學(xué)
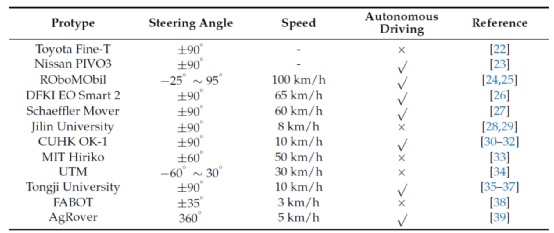
表1顯示了幾種4WID-4WIS EV樣機(jī)的性能分析。大多數(shù)樣機(jī)的轉(zhuǎn)向角范圍可達(dá)180°,有利于提高車(chē)輛的機(jī)動(dòng)性。與高校設(shè)計(jì)的原型車(chē)相比,汽車(chē)公司開(kāi)發(fā)的原型車(chē)具有更高的車(chē)速,更接近乘用車(chē)的性能要求。一些4WID-4WIS EV樣機(jī)可以實(shí)現(xiàn)簡(jiǎn)單的自動(dòng)駕駛功能,例如自動(dòng)泊車(chē)。ROboMObil和DFKI EO Smart 2可以實(shí)現(xiàn)高級(jí)自主駕駛。
表1 4WID-4WIS EV樣機(jī)性能分析
2.3 4WID-4WIS EV的集成線(xiàn)控模塊
4WID-4WIS EV的關(guān)鍵部件是集成了轉(zhuǎn)向、驅(qū)動(dòng)、制動(dòng)和懸架系統(tǒng)的集成線(xiàn)控模塊。四個(gè)線(xiàn)控模塊構(gòu)成了4WID-4WIS EV的底盤(pán)。圖3展示了四種典型的線(xiàn)控模塊,其中前三個(gè)是成熟的產(chǎn)品樣機(jī),(b)和(c)已應(yīng)用于Schaeffler Mover和ROboMObi。圖(d)是由作者自行開(kāi)發(fā)的。
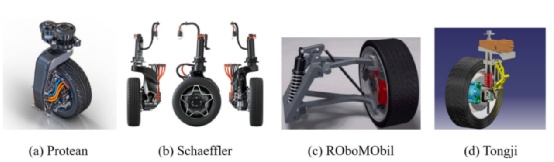
圖3 4WID-4WIS EV的集成線(xiàn)控模塊
表2展示了四種集成線(xiàn)控模塊的結(jié)構(gòu)分析情況。四個(gè)線(xiàn)控模塊的轉(zhuǎn)向執(zhí)行器具有類(lèi)似的結(jié)構(gòu),即伺服電機(jī)和減速器。但是,四個(gè)轉(zhuǎn)向執(zhí)行器的布置位置不同,即位于車(chē)輪上方(圖3a和b)、車(chē)輪內(nèi)部(圖3c)和車(chē)輪旁邊(圖3d)。由于轉(zhuǎn)向執(zhí)行器的布局位置不同,因此會(huì)產(chǎn)生不同的轉(zhuǎn)向范圍和控制問(wèn)題。如果將轉(zhuǎn)向執(zhí)行器位于車(chē)輪上方,則可以實(shí)現(xiàn)零主銷(xiāo)偏移從而降低轉(zhuǎn)向阻力。但是會(huì)增加線(xiàn)控模塊垂直方向上的尺寸。如果將轉(zhuǎn)向執(zhí)行器位于輪車(chē)旁,則線(xiàn)控模塊垂直方向上的尺寸可以減小,但會(huì)帶來(lái)較大的轉(zhuǎn)向主銷(xiāo)偏移量,對(duì)轉(zhuǎn)向電機(jī)性能要求較高。如果轉(zhuǎn)向執(zhí)行器布置在車(chē)輪內(nèi),則可以減小線(xiàn)控模塊垂直方向上的尺寸和轉(zhuǎn)向主銷(xiāo)偏移量,但會(huì)增大輪內(nèi)空間布局的難度。
表2 4WID-4WIS EV的集成線(xiàn)控模塊結(jié)構(gòu)分析

種線(xiàn)控模塊的執(zhí)行器均采用輪轂電機(jī)。Protean 線(xiàn)控模塊采用PD18輪轂電機(jī),輸出的功率和轉(zhuǎn)矩是四種線(xiàn)控模塊中最高的。制動(dòng)執(zhí)行器均采用液力制動(dòng)和電機(jī)再生制動(dòng)的混合制動(dòng)系統(tǒng)。所采用的懸架系統(tǒng)可以分為燭式、縱臂式和雙叉臂式三種。相比于燭式懸架和縱臂式懸架,雙叉臂懸架有更好的橫向剛度和側(cè)傾剛度,有利于提升車(chē)輛在側(cè)向加速度較大的情況下的安全性。從表1可以看出,ROboMObil的設(shè)計(jì)速度100 km/h是所有原型車(chē)中是最大的。
2.4 轉(zhuǎn)向模式和切換邏輯
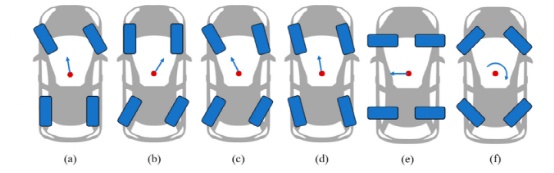
圖4 4WID-4WIS EV的轉(zhuǎn)向模式
(a)前輪轉(zhuǎn)向(b)后輪轉(zhuǎn)向(c)四輪轉(zhuǎn)向(d)斜向移動(dòng)(e)橫向移動(dòng)(f)原地轉(zhuǎn)向
如上所述,由于采用了線(xiàn)控模塊,每個(gè)車(chē)輪的轉(zhuǎn)向角都可以獨(dú)立控制。因此,4WID-4WIS EV比傳統(tǒng)車(chē)輛具有更多的轉(zhuǎn)向模式。如圖4所示,包括前輪轉(zhuǎn)向(FWS)、后輪轉(zhuǎn)向(RWS)、四輪轉(zhuǎn)向(4WS)、斜向移動(dòng)、橫向移動(dòng)和在狹小空間內(nèi)原地轉(zhuǎn)向[40]。主動(dòng)四輪轉(zhuǎn)向除了可以提高汽車(chē)低速條件下的機(jī)動(dòng)性,還可以改善高速時(shí)的操縱穩(wěn)定性[41,42]。
為了應(yīng)對(duì)不同工況,高效的轉(zhuǎn)向模式切換是十分必要的。同濟(jì)大學(xué)的陳辛波等基于轉(zhuǎn)向中心連續(xù)原理提出了一種轉(zhuǎn)向模式的切換邏輯,該方案可實(shí)現(xiàn)低速行駛時(shí)不停車(chē)的平穩(wěn)切換[43]。通過(guò)實(shí)車(chē)測(cè)試[44],研究了FWS和RWS、RWS和4WS的切換邏輯。為了使模式切換過(guò)程中車(chē)輛動(dòng)力學(xué)參數(shù)的突變和能量消耗達(dá)到最低,研究者們提出了B樣條曲線(xiàn)來(lái)設(shè)計(jì)切換軌跡,并用多目標(biāo)遺傳算法對(duì)其進(jìn)行優(yōu)化[45]。陳辛波等基于4WID-4WIS EV的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)模型,設(shè)計(jì)并驗(yàn)證了轉(zhuǎn)向模式切換策略[46]。為了在高速條件下實(shí)現(xiàn)FWS和4WS之間的切換控制,設(shè)計(jì)了魯棒控制器[47],旨在實(shí)現(xiàn)側(cè)偏角和橫擺角速度的平滑過(guò)渡。
3 4WID-4WIS EV的控制模型
該章節(jié)主要綜述了4WID-4WIS EV常用的控制模型,包括車(chē)輛動(dòng)力學(xué)模型、車(chē)輛運(yùn)動(dòng)學(xué)模型和路徑跟蹤模型。
3.1 車(chē)輛動(dòng)力學(xué)模型
車(chē)輛動(dòng)力學(xué)模型通常用于描述車(chē)輛高速條件下的動(dòng)力學(xué)特性,主要通過(guò)牛頓定律推導(dǎo)。根據(jù)控制自由度的數(shù)量,車(chē)輛動(dòng)力學(xué)模型有各種演變形式[48]。一個(gè)復(fù)雜的動(dòng)力學(xué)模型可以精確地描述車(chē)輛的動(dòng)力學(xué)特性。然而,由于復(fù)雜模型具有很強(qiáng)的非線(xiàn)性和耦合性,這將給控制器的設(shè)計(jì)帶來(lái)困難[49]。雖然可以通過(guò)一些假設(shè)來(lái)簡(jiǎn)化車(chē)輛動(dòng)力學(xué)模型,但在某些情況下假設(shè)條件是無(wú)效的。例如,線(xiàn)性輪胎模型的假設(shè)在極端條件[50]下是不成立的。
在車(chē)輛動(dòng)力學(xué)控制方面,研究人員通??紤]縱向運(yùn)動(dòng)、橫向運(yùn)動(dòng)、橫擺運(yùn)動(dòng)和側(cè)傾運(yùn)動(dòng)。圖5顯示了4WID-4WIS EV的動(dòng)力學(xué)模型。根據(jù)圖5,四自由度車(chē)輛動(dòng)力學(xué)模型可以用以下表示[51,52]:
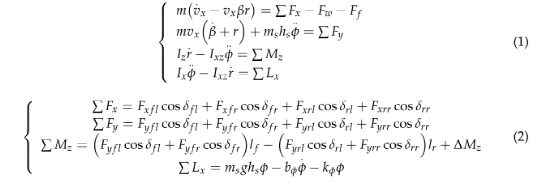
其中,vx是縱向速度,β是側(cè)偏角,r是重心的橫擺角速度,?是側(cè)偏角。另外∑Fx是輪胎的總縱向力,∑Fy是輪胎側(cè)總側(cè)向力,∑Mz是橫擺力矩,∑Lx是側(cè)傾力矩。Fw是空氣阻力,F(xiàn)f是滾動(dòng)阻力。m是汽車(chē)的質(zhì)量,ms是汽車(chē)的簧上質(zhì)量。Iz是橫擺慣性矩,Ixz是慣性積,Ix是側(cè)傾慣性矩。δi (i=fl,fr,rl,rr)是每個(gè)車(chē)輪的轉(zhuǎn)角(fl是左前輪,fr是右前輪,rl是左后輪,rr是右后輪)。Fxi和Fyi是每個(gè)輪胎的縱向力和側(cè)向力。k?是懸架的側(cè)傾剛度,b?是懸架的阻尼。?Mz是因左右車(chē)輪受力不同而產(chǎn)生的外部橫擺力矩。
其中,
是左右輪胎中心距。根據(jù)不同的控制目標(biāo),上述的4自由度車(chē)輛模型可以被簡(jiǎn)化成一個(gè)3自由度車(chē)輛模型或者2自由度車(chē)輛模型。
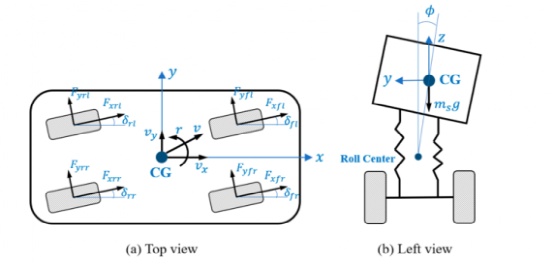
圖5 4WID-4WIS EV的動(dòng)力學(xué)模型
方程組(2)表明車(chē)輛的動(dòng)力學(xué)模型主要取決于輪胎的受力

和

。輪胎是車(chē)輛的一個(gè)關(guān)鍵部件,它的結(jié)構(gòu)特點(diǎn)和力學(xué)性能(垂向力、縱向力、側(cè)向力和回正力矩)對(duì)車(chē)輛的動(dòng)態(tài)性能(行駛、操縱穩(wěn)定性和安全性)[53]有重大的影響。輪胎的力學(xué)性能主要受輪胎類(lèi)型、側(cè)偏角、滑移率、速度等因素的影響。輪胎模型描述了車(chē)輪受力和影響因素之間的關(guān)系[54]。
輪胎模型主要分為三類(lèi):通過(guò)對(duì)輪胎的受力進(jìn)行簡(jiǎn)化而得到理論模型和解析公式,通過(guò)分析和擬合輪胎受力特性試驗(yàn)數(shù)據(jù)得到經(jīng)驗(yàn)?zāi)P?,結(jié)合理論模型和試驗(yàn)數(shù)據(jù)分析的半經(jīng)驗(yàn)?zāi)P蚚55]。大多數(shù)經(jīng)驗(yàn)?zāi)P突蛘甙虢?jīng)驗(yàn)?zāi)P途哂斜硎竞?jiǎn)單、便于計(jì)算和對(duì)特定輪胎擬合精度高的優(yōu)點(diǎn),如魔術(shù)輪胎模型[56]、Dugoff輪胎模型[57]、UniTire模型[58]、Burckhardt輪胎模型[59]、HSRI輪胎模型等[60]。理論模型不需要對(duì)試驗(yàn)的參數(shù)進(jìn)行擬合,通用性較強(qiáng),如Gim輪胎模型[61]、String輪胎模型[62]、Fiala輪胎模型[63]等。輪胎模型的選擇取決于所需要解決的實(shí)際車(chē)輛動(dòng)力學(xué)問(wèn)題,是需要更加精確的理論模型進(jìn)行建模還是需要面向?qū)嶋H工程應(yīng)用的經(jīng)驗(yàn)?zāi)P汀?/span>
為了降低控制器設(shè)計(jì)的復(fù)雜性,四輪車(chē)輛輪胎模型通常被簡(jiǎn)化為一個(gè)單軌模型,如圖6所示。事實(shí)上,四個(gè)轉(zhuǎn)向控制變量減少到兩個(gè)。兩種模型的轉(zhuǎn)向角轉(zhuǎn)換關(guān)系均遵循阿克曼轉(zhuǎn)向幾何學(xué)[64]。

式中

和

分別表示前輪和后輪的轉(zhuǎn)角,
是軸距。

圖6 4WID-4WIS EV的單軌模型
3.2 車(chē)輛運(yùn)動(dòng)學(xué)模型
車(chē)輛運(yùn)動(dòng)學(xué)模型通常用于解決車(chē)輛在低速條件下的運(yùn)動(dòng)規(guī)劃與控制問(wèn)題,如自動(dòng)泊車(chē)控制[65]。對(duì)于高速條件下車(chē)輛的運(yùn)動(dòng)控制,車(chē)輛的動(dòng)力學(xué)模型更加適用[66]。
4WID-4WIS EV的單軌運(yùn)動(dòng)學(xué)模型如下[67]。
其中

是車(chē)輛的縱向加速度,(X,Y)是車(chē)輛的位置坐標(biāo)。
3.3 路徑跟蹤模型
根據(jù)目標(biāo)路徑的信息差異,即目標(biāo)位置的坐標(biāo)或者目標(biāo)路徑的曲率,路徑跟蹤模型可以分為兩種類(lèi)型:一種是基于給定的

,X和Y,其目標(biāo)是使以下誤差最小化[68]。
其中
,

和

是目標(biāo)路徑的期望值。
第二種路徑跟蹤模型是根據(jù)目標(biāo)路徑的曲率信息推導(dǎo)出來(lái)的,如圖7所示。為了使車(chē)輛精確地跟蹤目標(biāo)路徑,路徑跟蹤問(wèn)題等價(jià)于使橫擺角誤差

和側(cè)向偏移
最小化,如下所示[69]。

其中
是目標(biāo)路徑的曲率。
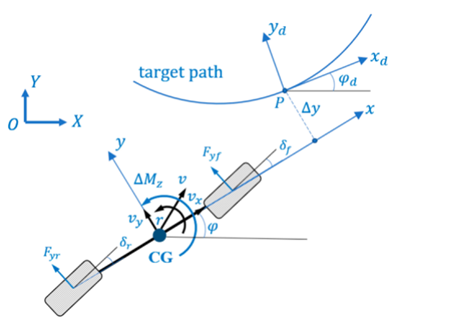
圖7 4WID-4WIS EV的路徑跟蹤模型
4 4WID-4WIS EV自動(dòng)駕駛的控制
在本章節(jié)介紹4WID-4WIS EV的控制模型。綜述并討論了操縱穩(wěn)定性的控制算法和策略、防側(cè)翻和路徑跟蹤。最后介紹4WID-4WIS EV的主動(dòng)容錯(cuò)控制算法。
4.1 4WID-4WIS EV的控制框架
4WID-4WIS EV的控制框架分為兩個(gè)類(lèi)型,即耦合控制框架[70]和解耦控制框架[71],如圖8所示。在耦合控制框架中,縱向運(yùn)動(dòng)控制和橫向運(yùn)動(dòng)控制耦合,這就產(chǎn)生了多目標(biāo)控制,給控制算法的設(shè)計(jì)帶來(lái)了挑戰(zhàn)。在解耦控制框架中,縱向運(yùn)動(dòng)控制與側(cè)向運(yùn)動(dòng)控制解耦,這減小了控制器設(shè)計(jì)的復(fù)雜性。
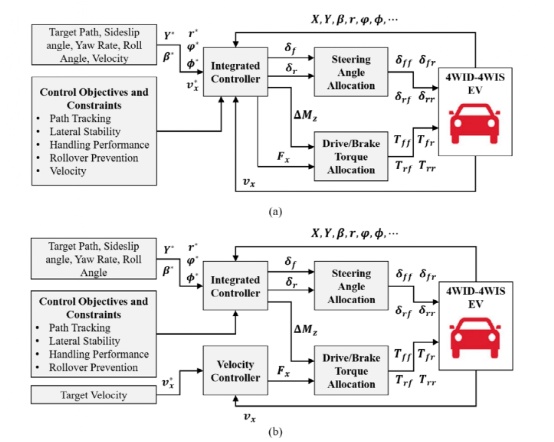
圖8 4WID-4WIS EV的控制框架
(a)耦合控制框架 (b)解耦控制框架
從圖8中我們發(fā)現(xiàn)耦合控制框架和解耦控制框架都由兩個(gè)級(jí)別組成。高級(jí)是控制器設(shè)計(jì)。根據(jù)路徑跟蹤、側(cè)向穩(wěn)定性、操縱性能、防側(cè)翻和速度跟蹤的控制目標(biāo),來(lái)跟蹤各種參考目標(biāo),如:目標(biāo)路徑、側(cè)偏角、橫擺角速度、側(cè)傾角和速度。在路徑跟蹤控制過(guò)程中,必須考慮各種控制約束。所有的控制算法都采用集成控制器設(shè)計(jì),然后集成控制器將控制信號(hào)輸出到低級(jí)的控制系統(tǒng),即分配層。
分配層次包括轉(zhuǎn)向角分配和扭矩分配。轉(zhuǎn)向角分配基于等式(4)。扭矩分配算法用于調(diào)整總縱向力 Fx 和外部橫擺力矩 DMz,即直接橫擺力矩控制 (DYC)。已經(jīng)研究了各種扭矩分配算法,包括直接分配方法[72]、仿射控制分配[73]、序列最小二乘法[74]、加權(quán)最小二乘法[75]、動(dòng)態(tài)分配[76]、模型預(yù)測(cè)控制 (MPC)[77]等。扭矩分配后,將計(jì)算出四個(gè)車(chē)輪的目標(biāo)驅(qū)動(dòng)/制動(dòng)扭矩。
最后,分配級(jí)別將四個(gè)車(chē)輪的目標(biāo)轉(zhuǎn)向角和扭矩輸出到 4WID-4WIS EV控制系統(tǒng)。對(duì)于閉環(huán)控制,車(chē)輛的運(yùn)動(dòng)狀態(tài)和位置信息將反饋給集成控制器和速度控制器。由于4WID-4WIS技術(shù)的應(yīng)用,4WID-4WIS EV動(dòng)態(tài)控制有四種控制策略,即主動(dòng)前轉(zhuǎn)向(AFS)、AFS+DYC、4WS和4WS+ DYC,如表3所示?;谶@些控制策略,4WID-4WIS 電動(dòng)汽車(chē)在路徑跟蹤、操縱穩(wěn)定性和側(cè)翻預(yù)防方面與傳統(tǒng)車(chē)輛相比有著卓越的駕駛性能。
表3 4WID-4WIS EV的控制策略
4.2 操縱穩(wěn)定性控制
車(chē)輛的操縱穩(wěn)定性控制被定義為跟蹤所需的側(cè)滑角和偏航率[78]。對(duì)于傳統(tǒng)的 FWS 車(chē)輛,只能控制前輪轉(zhuǎn)向角。在高速條件下進(jìn)行轉(zhuǎn)向操縱時(shí),前輪胎橫向力可能進(jìn)入飽和區(qū),無(wú)法提供足夠的力來(lái)保證車(chē)輛的橫向穩(wěn)定性[79]。對(duì)于4WID-4WIS EV控制系統(tǒng),由于可以獨(dú)立控制每個(gè)車(chē)輪的制動(dòng)和驅(qū)動(dòng)扭矩,因此可以輕松實(shí)現(xiàn)DYC。因此,外部橫擺力矩可以彌補(bǔ)輪胎側(cè)向力的不足,增加操縱穩(wěn)定性。在[80]中,提出了一種基于 BP-PID 控制器的多模型控制系統(tǒng),用于通過(guò) DYC 提高橫向穩(wěn)定性。在 [81] 中,設(shè)計(jì)了一種基于校正 LQR 的新型 DYC 控制算法來(lái)實(shí)現(xiàn)車(chē)輛動(dòng)態(tài)穩(wěn)定性控制?;诨瑒?dòng)模型控制(SMC),提出了一種基于DYC 的分層控制策略,以提高行駛極限時(shí)的橫向穩(wěn)定性[82]。通過(guò)相平面法計(jì)算穩(wěn)定性邊界,設(shè)計(jì)了一種新的可擴(kuò)展協(xié)調(diào)控制器來(lái)提高行駛穩(wěn)定性和操縱性能,可以在AFS和DYC之間找到最佳平衡點(diǎn)[83]。為了增強(qiáng)橫向穩(wěn)定性,將一種結(jié)構(gòu)改進(jìn)的魯棒內(nèi)模控制方法應(yīng)用于AFS+DYC的集成控制器設(shè)計(jì)[84]??刂茍D如圖 9 所示。
圖9 AFS+DYC控制系統(tǒng)的控制圖
與DYC相比,4WS技術(shù)更容易實(shí)現(xiàn)零側(cè)滑角。同時(shí),不需要處理外部橫擺力矩和總縱向力的分配[85]。在[86]中,線(xiàn)性參數(shù)變化(LPV)模型用于簡(jiǎn)化非線(xiàn)性模型,解耦控制應(yīng)用于速度跟蹤控制和操縱穩(wěn)定性控制。在[87]中,考慮到速度變化時(shí)的運(yùn)動(dòng),LPV 控制器被設(shè)計(jì)用于 4WS 的操縱穩(wěn)定性控制。此外,針對(duì) 4WS 車(chē)輛提出了對(duì)角線(xiàn)解耦(ADD)控制的衰減,這在解決不確定性和干擾方面表現(xiàn)出良好的魯棒性 [88]。在[89]中,提出了一種內(nèi)部模型控制(IMC)策略來(lái)解決穩(wěn)定性控制系統(tǒng)的非線(xiàn)性問(wèn)題。此外,采用多輸入多輸出 (MIMO) IMC 進(jìn)行車(chē)輛穩(wěn)定性控制[90]。在[91]中,一種操縱修正方法被應(yīng)用于4WS車(chē)輛的操縱穩(wěn)定性控制?;赟MC,分散控制算法對(duì)任意橫向擾動(dòng)具有魯棒性,并且可以保證車(chē)輛收斂到參考橫擺率和零側(cè)滑[92]。由于魯棒控制具有處理參數(shù)不確定性、外部擾動(dòng)和傳感器噪聲強(qiáng)的優(yōu)點(diǎn),許多研究人員對(duì)魯棒控制進(jìn)行了研究,并將其應(yīng)用于4WS車(chē)輛的操縱穩(wěn)定性控制當(dāng)中,包括H2控制、

控制和
綜合控制 [93-96]。在[97]中,H2/
混合魯棒控制器被設(shè)計(jì)用于穩(wěn)定性控制。在[98]中,具有
性能的預(yù)補(bǔ)償解耦控制應(yīng)用于縱向運(yùn)動(dòng)控制和操縱穩(wěn)定性控制。在[99]中,使用綜合魯棒控制器提高了操縱穩(wěn)定性和系統(tǒng)魯棒性。在[100]的車(chē)輛模型中考慮了參數(shù)的變化,并且

-綜合控制器是為 4WS 設(shè)計(jì)的。雖然魯棒控制方法在處理參數(shù)擾動(dòng)方面表現(xiàn)出很強(qiáng)的魯棒性,但大范圍的擾動(dòng)會(huì)應(yīng)用到高階控制器,這給硬件帶來(lái)了大量的計(jì)算。我們需要在控制器設(shè)計(jì)中找到控制性能和計(jì)算效率之間的良好平衡。
憑借 4WS 和 DYC 的優(yōu)勢(shì),4WS 和 DYC 的組合為 4WID-4WIS 電動(dòng)汽車(chē)提供了卓越的操縱穩(wěn)定性[101]。在[102,103]中,設(shè)計(jì)了兩個(gè)前饋和反饋控制器,通過(guò)4WS和DYC的集成控制實(shí)現(xiàn)零側(cè)滑角和目標(biāo)偏航率跟蹤。在[104]中,將穩(wěn)健的
控制方法應(yīng)用于4WS 和DYC 的協(xié)調(diào)控制,以提高極端條件下的操縱穩(wěn)定性。在[105]中,模糊控制理論被用來(lái)設(shè)計(jì)4WS+DYC的反饋控制器,以提高高速條件下的橫向穩(wěn)定性。為了獲得增益調(diào)度控制器,LPV 系統(tǒng)與
最優(yōu)控制理論相結(jié)合,用于 4WS 和 DYC 的操縱穩(wěn)定性控制器設(shè)計(jì)[106]。此外,考慮到輪胎非線(xiàn)性,4WS和DYC控制與主動(dòng)懸架控制相結(jié)合,以提高操縱穩(wěn)定性和乘坐舒適性[107]。與AFS相比,4WS和DYC的協(xié)同控制可以提高AV在極端條件下的主動(dòng)安全性。
4.3 翻車(chē)預(yù)防控制
雖然操縱穩(wěn)定性控制可以在限制行駛條件下提高橫向行駛安全,但對(duì)于一些大尺寸車(chē)輛,例如卡車(chē)和公共汽車(chē),有必要考慮側(cè)翻預(yù)防性能[108]。側(cè)翻預(yù)防控制通常與操縱穩(wěn)定性控制一起考慮[109]。側(cè)翻指數(shù)(RI)通常用作防側(cè)翻的控制性能指標(biāo)。在 [110] 中,提出了一種RI算法來(lái)評(píng)估側(cè)翻效應(yīng),基于RI算法和側(cè)傾狀態(tài)估計(jì)器設(shè)計(jì)了側(cè)傾狀態(tài)估計(jì)器,并設(shè)計(jì)了集成的側(cè)翻緩解控制器,以達(dá)到在不損失車(chē)輛橫向損失的情況下降低側(cè)翻危險(xiǎn)的目的。此外,提出了一種多側(cè)翻指數(shù)(MRI)最小化方法來(lái)實(shí)現(xiàn)重型鉸接式車(chē)輛的主動(dòng)側(cè)翻預(yù)防控制[111]。
不同的控制算法被設(shè)計(jì)用于側(cè)翻預(yù)防控制。在[112]中,線(xiàn)性二次靜態(tài)輸出反饋(LQSOF)方法應(yīng)用于預(yù)防車(chē)輛側(cè)翻的預(yù)覽控制器設(shè)計(jì)。在[113]中,設(shè)計(jì)了一種非線(xiàn)性控制策略,可以在防止側(cè)翻的同時(shí)保證操縱穩(wěn)定性。在[114,115]中,設(shè)計(jì)了脈沖轉(zhuǎn)向系統(tǒng)和液壓機(jī)械脈沖轉(zhuǎn)向系統(tǒng),將操縱穩(wěn)定性控制和側(cè)翻預(yù)防控制集成在一起。在 [116] 中,線(xiàn)性時(shí)變 (LTV) MPC 應(yīng)用于集成控制器設(shè)計(jì),可以通過(guò) 4WS 技術(shù)提高橫向穩(wěn)定性、操控性能和側(cè)翻預(yù)防。在[117]中,模糊SMC方法應(yīng)用于4WS車(chē)輛的車(chē)輛動(dòng)態(tài)控制,可以增強(qiáng)動(dòng)態(tài)響應(yīng)并處理系統(tǒng)非線(xiàn)性。在 [118] 中,為 4WS 車(chē)輛提出了一種新型的分層控制,它使用分?jǐn)?shù) SMC 來(lái)獲得良好的魯棒性,控制系統(tǒng)框圖如圖 10 所示。雖然SMC 在處理系統(tǒng)非線(xiàn)性方面表現(xiàn)出良好的性能,但控制器抖動(dòng)仍然是該應(yīng)用的關(guān)鍵問(wèn)題。
圖10 118文獻(xiàn)中的4WS控制系統(tǒng)控制框圖
此外,通常將 4WS 和 DYC 結(jié)合使用以提高防側(cè)翻性能。使用 4WS 和 DYC 技術(shù),提出了一種帶轉(zhuǎn)向的集成動(dòng)態(tài)控制(IDCS)系統(tǒng),以通過(guò)模糊邏輯提高操縱穩(wěn)定性和側(cè)翻預(yù)防性能[119]。在[120]中,設(shè)計(jì)了一個(gè)切換式 MPC 控制器,通過(guò)主動(dòng)轉(zhuǎn)向控制和主動(dòng)差速制動(dòng)控制實(shí)現(xiàn)側(cè)翻預(yù)防。基于SMC方法,提出了一種集成主動(dòng)轉(zhuǎn)向控制和驅(qū)動(dòng)/制動(dòng)力分配的分層協(xié)調(diào)控制算法,可以提高操縱穩(wěn)定性和防側(cè)翻性能[121]。
4.4 路徑跟蹤控制
路徑跟蹤控制是自動(dòng)駕駛汽車(chē)的主要控制任務(wù)[122]。因此,近年來(lái)得到了廣泛的研究,設(shè)計(jì)了各種控制算法。在[123]中,DYC 用于提高路徑跟蹤性能,并將穩(wěn)健的
控制方法應(yīng)用于 DYC 控制器設(shè)計(jì)。在[124]中,提出了一種基于DYC的耦合控制框架,并且速度跟蹤控制和路徑跟蹤控制都與LTV MPC一起考慮。在[125]中,基于LQR技術(shù),4WS和DYC都被用來(lái)提高路徑跟蹤性能。為了提高路徑跟蹤控制器的魯棒性,使用反推SMC理論[126]為4WID-4WIS農(nóng)業(yè)機(jī)器人車(chē)輛設(shè)計(jì)了一個(gè)魯棒的路徑跟蹤控制器。為了提高反步 SMC 的控制精度,將前饋和反步 SMC 相結(jié)合的綜合方法應(yīng)用于 4WID-4WIS EV 的路徑跟蹤控制[127]。在 [128] 中,四輪 SMC 轉(zhuǎn)向控制器設(shè)計(jì)用于 4WID-4WIS EV 的路徑跟蹤。同時(shí),縱向速度控制器采用SMC方法設(shè)計(jì)。
對(duì)于低速的自動(dòng)駕駛考慮路徑跟蹤控制就足夠了,但是隨著車(chē)速的提高,車(chē)輛的操縱穩(wěn)定性和防側(cè)翻問(wèn)題就越來(lái)越突出。路徑跟蹤問(wèn)題需要與高速條件下的操縱穩(wěn)定性問(wèn)題一同考慮,尤其是在極端條件下。與傳統(tǒng)車(chē)輛相比,4WID-4WIS EV有更多的控制自由度,因此更容易實(shí)現(xiàn)路徑跟蹤和操縱穩(wěn)定性的集成控制。文獻(xiàn)[130]中將一種LQR反饋控制器應(yīng)用于4WS高速緊急避障條件下的路徑跟蹤。除了路徑跟蹤問(wèn)題,也考慮了操縱穩(wěn)定性的控制問(wèn)題。然而LQR方法對(duì)系統(tǒng)非線(xiàn)性和不確定性具有較差的魯棒性。文獻(xiàn)[131]通過(guò)集成AFS和DYC設(shè)計(jì)了具有魯棒性的LQR控制器用于路徑跟蹤?;赟MC理論,設(shè)計(jì)了4WS車(chē)輛的自動(dòng)路徑跟蹤控制器,該控制器對(duì)于處理轉(zhuǎn)向功率擾動(dòng)、路徑半徑波動(dòng)、橫向風(fēng)擾動(dòng)等系統(tǒng)不確定性具有很強(qiáng)的魯棒性。文獻(xiàn)[133]將哈密頓能量函數(shù)控制理論應(yīng)用于4WS+DYC控制系統(tǒng)的路徑跟蹤和側(cè)向穩(wěn)定性控制。除此之外,將魯棒控制器應(yīng)用在集成4WS+DYC控制系統(tǒng)不僅可以提高路徑跟蹤性能和操縱穩(wěn)定性,而且對(duì)參數(shù)擾動(dòng)也具有較好的魯棒性??刂茍D如圖11所示。
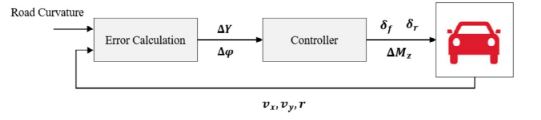
圖11 文獻(xiàn)134中集成4WS+DYC控制系統(tǒng)的控制圖
此外,MPC被廣泛地應(yīng)用于AV的路徑跟蹤控制[135]。文獻(xiàn)[136]基于MPC設(shè)計(jì)了一種耦合控制框架,綜合考慮了速度跟蹤控制,操縱穩(wěn)定性控制和路徑跟蹤控制。此外,估計(jì)了道路附著系數(shù)以提高控制精度?;诜蔷€(xiàn)性4WS車(chē)輛模型,文獻(xiàn)[137]通過(guò)非線(xiàn)性模型預(yù)測(cè)控制(NMPC)設(shè)計(jì)了一種綜合考慮操縱穩(wěn)定性和路徑跟蹤的集成控制器。盡管MPC相較于其他控制算法有更好的控制精度,但是實(shí)時(shí)優(yōu)化給硬件帶來(lái)了巨大的計(jì)算量。
最后,表4總結(jié)了4WID-4WIS EV的各種控制實(shí)例??梢园l(fā)現(xiàn),2自由度單軌模型是對(duì)4WID-4WIS EV最常用的控制模型。如果考慮縱向運(yùn)動(dòng)控制和防側(cè)翻控制,則需要另一個(gè)控制自由度,這就產(chǎn)生了3自由度控制模型。為了提高操縱穩(wěn)定性,防側(cè)翻性能和路徑跟蹤性能,不同的控制策略如AFS+DYC,4WS和4WS+DYC等在4WID-4WIS EV的動(dòng)態(tài)控制中廣泛應(yīng)用。而且,LQR、SMC、魯棒控制和MPC是4WID-4WIS EV最常用的控制算法。LQR只能解決線(xiàn)性系統(tǒng),SMC和魯棒控制對(duì)于解決系統(tǒng)不確定性和擾動(dòng)有很好的魯棒性,但是它們的控制性能非常容易受到模型精度的影響。憑借模型預(yù)測(cè)和實(shí)時(shí)優(yōu)化,MPC可以實(shí)現(xiàn)精確控制,但是實(shí)時(shí)優(yōu)化會(huì)給硬件帶來(lái)巨大的計(jì)算量。仿真、硬件在環(huán)(HIL)測(cè)試和道路測(cè)試是三種算法驗(yàn)證的方法??梢园l(fā)現(xiàn),大多數(shù)論文都是通過(guò)仿真來(lái)評(píng)價(jià)控制算法。只有很少的論文進(jìn)行了道路試驗(yàn)。一個(gè)很重要的原因是4WID-4WIS EV所應(yīng)用的技術(shù)還不夠成熟,尤其是X-by-wire技術(shù),其可靠性和安全性不能完全保證。道路測(cè)試涉及到一定的安全風(fēng)險(xiǎn)。
表4 不同控制實(shí)例的總結(jié)
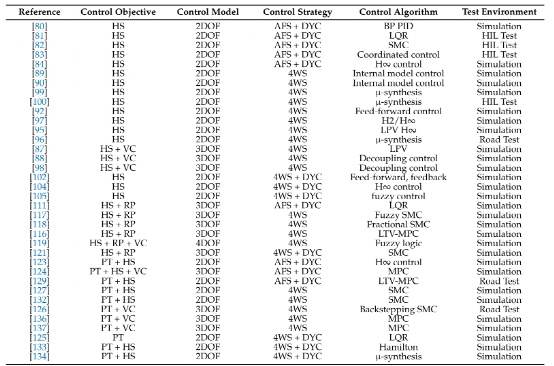
其中HS、PT、RP、VC分別為操作穩(wěn)定性、軌跡跟蹤、防止翻車(chē)、速度控制的縮寫(xiě)
4.5 主動(dòng)容錯(cuò)控制
雖然X-by-wire模塊可以為4WID-4WIS電動(dòng)汽車(chē)帶來(lái)多種控制策略和轉(zhuǎn)向模式,有利于提高駕駛性能。但是一旦其中一個(gè)X-by-wire模塊出現(xiàn)故障,就會(huì)增加車(chē)輛不穩(wěn)定的風(fēng)險(xiǎn)[138]。為了解決這個(gè)問(wèn)題,主動(dòng)容錯(cuò)控制算法得到廣泛研究[139]。
文獻(xiàn)[140]設(shè)計(jì)了一種基于MPC的容錯(cuò)控制系統(tǒng),其中一個(gè)MPC用于容錯(cuò)控制,而另一個(gè)MPC作為觀測(cè)器對(duì)執(zhí)行器故障進(jìn)行評(píng)估和補(bǔ)償。在文獻(xiàn)[141]中提出了一種基于模糊邏輯和MPC的多重的基于模型容錯(cuò)控制系統(tǒng)。在文獻(xiàn)[142]中,采用雙環(huán)SMC來(lái)處理輪轂電機(jī)故障。在文獻(xiàn)[143]中,設(shè)計(jì)了一種自適應(yīng)SMC容錯(cuò)控制器。在此基礎(chǔ)上,文獻(xiàn)[144]將改進(jìn)SMC應(yīng)用到4WID-4WIS電動(dòng)汽車(chē)的主動(dòng)容錯(cuò)控制中,其中轉(zhuǎn)向幾何根據(jù)故障車(chē)輪所在位置重新安排。在文獻(xiàn)[145]中,憑借自適應(yīng)快速終端SMC設(shè)計(jì)了一種魯棒自適應(yīng)容錯(cuò)控制方案。此外,博弈論也被應(yīng)用到主動(dòng)容錯(cuò)控制中。在文獻(xiàn)[146]中,通過(guò)微分對(duì)策設(shè)計(jì)了一種基于合作博弈的執(zhí)行器容錯(cuò)控制策略。此外,文獻(xiàn)[147]結(jié)合反饋線(xiàn)性化和合作博弈論設(shè)計(jì)容錯(cuò)控制器。為了提高容錯(cuò)控制器的魯棒性,文獻(xiàn)[148]設(shè)計(jì)了一種與模型無(wú)關(guān)的自校正容錯(cuò)控制框架,可以加強(qiáng)不同故障條件下縱向和側(cè)向跟蹤能力。
為了改善監(jiān)控車(chē)輛狀態(tài)的性能,文獻(xiàn)[149]設(shè)計(jì)了一種故障檢測(cè)和診斷算法來(lái)監(jiān)視車(chē)輛狀態(tài)并且提供包含控制器錯(cuò)誤信息的反饋。在文獻(xiàn)[150]中,設(shè)計(jì)了一種主動(dòng)容錯(cuò)控制框架,包含基線(xiàn)控制器、一組可重構(gòu)控制器、故障檢測(cè)和診斷機(jī)制和決策機(jī)制。
此外,在文獻(xiàn)[151]中,控制分配方法已被廣泛用于實(shí)現(xiàn)4WID-4WIS電動(dòng)汽車(chē)的主動(dòng)容錯(cuò)控制。在文獻(xiàn)[152]中,提出了一種定向輪胎力分配算法以解決轉(zhuǎn)向系統(tǒng)在路徑跟蹤過(guò)程中的故障。在文獻(xiàn)[29]中,介紹了一種基于偽逆矩陣的控制分配方法來(lái)實(shí)現(xiàn)力和力矩的解耦?;贚PV框架,文獻(xiàn)[153]將重構(gòu)控制應(yīng)用于轉(zhuǎn)矩分配,即使在線(xiàn)控轉(zhuǎn)向系統(tǒng)發(fā)生故障時(shí)也可以實(shí)現(xiàn)速度和路徑跟蹤。在文獻(xiàn)[154]中,基于故障檢測(cè)和診斷模塊,設(shè)計(jì)了一種可重構(gòu)控制分配器,將廣義力/力矩最優(yōu)化地分配給四個(gè)輪子。
5 4WID-4WIS EV的挑戰(zhàn)與展望
盡管4WID-4WIS EV相較于傳統(tǒng)的車(chē)輛有更加卓越的性能,但是一些與機(jī)械和控制相關(guān)的關(guān)鍵技術(shù)問(wèn)題還沒(méi)有得到解決,這阻礙了其商業(yè)化應(yīng)用。
第一個(gè)挑戰(zhàn)是4WID-4WIS EV的高成本。由于X-by-wire模塊的應(yīng)用,4WID-4WIS EV 中要用到12個(gè)控制執(zhí)行器。與傳統(tǒng)的集中控制式車(chē)輛相比,更多的執(zhí)行器會(huì)導(dǎo)致更高的成本。因此,成本的降低是首要考慮的。X-by-wire模塊的高度集成化設(shè)計(jì)和可重構(gòu)底盤(pán)的概念是很好的解決方案。通過(guò)高度集成化的X-by-wire模塊,可以根據(jù)不同需求,使用不同數(shù)量的X-by-wire模塊重構(gòu)底盤(pán),并且應(yīng)用到不同的自主移動(dòng)平臺(tái),例如,四個(gè)X-by-wire模塊可構(gòu)成自動(dòng)乘用車(chē),而八個(gè)X-by-wire模塊可組成自動(dòng)卡車(chē)。一旦任務(wù)完成,X-by-wire模塊將被拆分,并為下一次任務(wù)做好重組準(zhǔn)備。
第二個(gè)挑戰(zhàn)是集成化X-by-wire模塊的機(jī)械結(jié)構(gòu)和集成技術(shù)不成熟,特別是在處理極端條件方面。從集成X-by-wire模塊的文獻(xiàn)綜述中可以發(fā)現(xiàn)大多數(shù)X-by-wire模塊采用簡(jiǎn)單的懸架結(jié)構(gòu),不足以承受巨大的側(cè)向力。因此,現(xiàn)有的4WID-4WIS EV只能在普通的條件下行駛,不能處理嚴(yán)峻和極端的條件。因此有必要為4WID-4WIS EV的未來(lái)應(yīng)用設(shè)計(jì)先進(jìn)實(shí)用的X-by-wire模塊。
第三個(gè)挑戰(zhàn)是X-by-wire技術(shù)的可靠性。相比于傳統(tǒng)的機(jī)械系統(tǒng),X-by-wire技術(shù)的可靠性和安全性較差,通常是不可靠的。因?yàn)?WID-4WIS EV有12個(gè)涉及轉(zhuǎn)向、驅(qū)動(dòng)和制動(dòng)的控制執(zhí)行器,執(zhí)行器的故障可能性仍是一個(gè)關(guān)鍵問(wèn)題。另外,考慮到X-by-wire技術(shù),尤其是線(xiàn)控轉(zhuǎn)向技術(shù)不是一個(gè)成熟的技術(shù),因此有必要設(shè)計(jì)有效的主動(dòng)容錯(cuò)控制系統(tǒng)來(lái)保證系統(tǒng)功能安全性。
最后的挑戰(zhàn)是控制技術(shù),對(duì)于具有非線(xiàn)性MIMO控制系統(tǒng)的4WID-4WIS EV,用簡(jiǎn)單的控制算法來(lái)處理參數(shù)的不確定性、外部干擾和傳感器噪聲是不容易的,例如PID控制。
6 總結(jié)
以底盤(pán)配置和控制技術(shù)為重點(diǎn),本文對(duì)4WID-4WIS EV進(jìn)行了文獻(xiàn)綜述和展望。介紹了各種4WID-4WIS EV樣機(jī)和集成化X-by-wire模塊。比較并分析了不同的底盤(pán)配置和機(jī)械結(jié)構(gòu)。此外,討論了4WID-4WIS EV的轉(zhuǎn)向方式和轉(zhuǎn)換邏輯。總結(jié)了4WID-4WIS EV常用的控制模型,包括運(yùn)動(dòng)學(xué)模型、動(dòng)力學(xué)模型和路徑跟蹤模型。通過(guò)不同的控制模型,可以實(shí)現(xiàn)控制目標(biāo),包括操縱穩(wěn)定性控制、防側(cè)翻控制、路徑跟蹤控制和主動(dòng)容錯(cuò)控制。對(duì)于不同的控制目標(biāo),綜述并分析了控制算法。最后,對(duì)于4WID-4WIS EV的開(kāi)發(fā)和應(yīng)用提出了一些挑戰(zhàn)和展望,包括成本、機(jī)械設(shè)計(jì)、控制技術(shù)等。
作者貢獻(xiàn):起草初稿, P .H.; 寫(xiě)作——評(píng)論與編輯, X.C. 兩位作者都已閱讀并同意手稿的出版版本。
撥款:本研究由國(guó)家重點(diǎn)R&D項(xiàng)目資助,(批準(zhǔn)編號(hào)2018YFB0104802)。
利益沖突:作者聲明沒(méi)有利益沖突。
參考文獻(xiàn)
點(diǎn)贊 0 反對(duì) 0 舉報(bào) 0
收藏 0
評(píng)論 0 分享 116



 廣告
廣告 編輯推薦




最新資訊
-
聯(lián)合國(guó)法規(guī)R60對(duì)兩輪車(chē)操縱件與指示裝置的
2026-03-04 12:08
-
標(biāo)準(zhǔn)立項(xiàng)|《汽車(chē)異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車(chē)大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車(chē)大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
-
電池耐久評(píng)價(jià)開(kāi)始從“電池單體性能指標(biāo)”轉(zhuǎn)
2026-03-04 11:38
