




 廣告
廣告





















































基于四輪轉(zhuǎn)向和直接橫擺力矩控制的自主地面車輛LPV/H∞路徑跟蹤控制器設(shè)計
2022-03-01 20:37:54· 來源:同濟智能汽車研究所

中增加了適當?shù)男阅芗訖?quán)函數(shù)。閉環(huán)控制系統(tǒng)的框圖如圖4所示,K表示反饋控制器。W表示由目標路徑信息描述的外部干擾。y表示系統(tǒng)輸出,可以測量或觀察。u是系統(tǒng)的控制輸入,由

和
組成。輸出

和

用于評估閉環(huán)系統(tǒng)的魯棒性能。此外,加權(quán)函數(shù)

和

分別表示u和y的性能輸出。
圖4 閉環(huán)控制系統(tǒng)框圖
為了獲得良好的路徑跟蹤性能和瞬態(tài)響應(yīng),選擇了性能加權(quán)函數(shù)

,該函數(shù)由下式給出:
這表明

和

的穩(wěn)態(tài)誤差要求都小于1%。基于執(zhí)行器的能力來選擇性能加權(quán)函數(shù)
。將前后轉(zhuǎn)向角限制在45度以內(nèi),最大外偏航力矩設(shè)定為1000N·m。最后,將

定義為:

此外,加權(quán)函數(shù)

和

可以重寫為狀態(tài)空間形式:
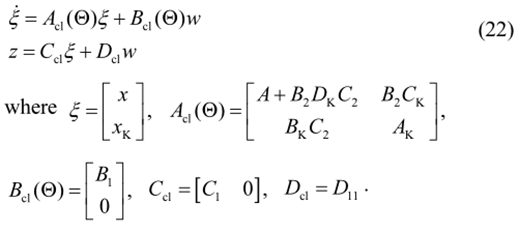
最后,閉環(huán)控制系統(tǒng)可以簡化為圖5所示的廣義系統(tǒng),廣義系統(tǒng)P可以表示為:


圖5 廣義系統(tǒng)
如圖5所示,LPV/H∞控制器

設(shè)計用于4WIS-4WID EV的路徑跟蹤,可以狀態(tài)空間形式寫入:
其中表示控制器的狀態(tài)向量,

和

表示需要求解的控制器參數(shù)矩陣。
將控制器(21)應(yīng)用于LPV系統(tǒng)(20)產(chǎn)生以下閉環(huán)系統(tǒng)。
上述矩陣

和

都與參數(shù)變化向量

有關(guān)。對于多面體模型,第j個頂點上的矩陣可以表示為

和

。
所設(shè)計的LPV/H∞控制器應(yīng)使閉環(huán)系統(tǒng)(22)漸近穩(wěn)定,且從外部干擾w到測量輸出z的傳遞函數(shù)的無窮范數(shù)應(yīng)小于1,即
。我們首先介紹下面的引理。
引理1(Yang等人,2008年)。在給定正常數(shù)γ的情況下,考慮第j個頂點的閉環(huán)系統(tǒng)(22),以下兩個條件是等價的。



 廣告
廣告 編輯推薦




最新資訊
-
開年豪擲1.8億搶用戶,又一車企加入“價格
2026-03-04 16:05
-
聯(lián)合國法規(guī)R60對兩輪車操縱件與指示裝置的
2026-03-04 12:08
-
標準立項|《汽車異種材料鉚接接頭拉伸性能
2026-03-04 11:40
-
“汽車大角度座椅 第1部分:通用要求”將有
2026-03-04 11:39
-
“汽車大角度座椅 第2部分:可靠性要求”將
2026-03-04 11:39
