




 廣告
廣告





















































基于線性變參數(shù)系統(tǒng)的四輪轉(zhuǎn)向自主地面車輛路徑跟蹤控制及實驗驗證
2021-09-12 10:45:58· 來源:同濟智能汽車研究所

不同摩擦系數(shù)路面的路徑跟蹤結(jié)果如圖6所示??梢园l(fā)現(xiàn),即使在冰面上,路徑跟蹤誤差也很小。詳細(xì)分析了跟蹤誤差。橫向位置誤差和偏航角誤差如圖7和圖8所示。此外,表2中列出了最大值和均方值(RMS)??梢钥闯觯Y(jié)冰道路上橫向位置誤差的最大值和RMS值為0.0711m和0.0272m。偏航角誤差值的最大值和RMS為0.5021和0.1231。這表明,所設(shè)計的控制器具有良好的路徑跟蹤和抗參數(shù)擾動的魯棒穩(wěn)定性。
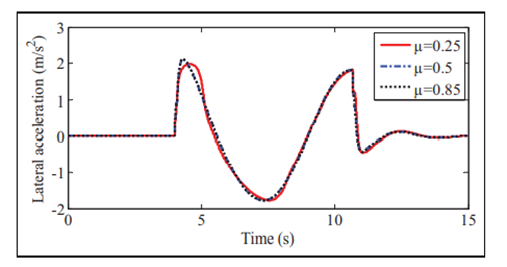
圖9 不同摩擦系數(shù)路面下的橫向加速度誤差

圖10 不同摩擦系數(shù)路面下的前輪轉(zhuǎn)向角誤差
圖9為4WS AGV的橫向加速度。在濕路面和干路面上,最大橫向加速度不是很大。但在結(jié)冰路面條件下,橫向加速度非常大。前輪和后輪的轉(zhuǎn)向角分別如圖10和圖11所示??梢园l(fā)現(xiàn),控制器必須提供更大的轉(zhuǎn)向角,以在低路面摩擦系數(shù)條件下保持魯棒穩(wěn)定性和路徑跟蹤能力。
B.不同的縱向速度
由于路徑跟蹤控制器是基于單軌模型設(shè)計的,其中假設(shè)縱向速度恒定。因此,有必要對不同縱向速度條件下4WS AGV的跟蹤性能進(jìn)行評估。道路摩擦系數(shù)設(shè)置為0.85,4WS AGV的縱向速度分別設(shè)置為10 m/s、15 m/s和20 m/s。
三種不同縱向速度條件下的路徑跟蹤結(jié)果如圖12所示??梢钥闯?,所設(shè)計的控制器能夠以較小的誤差跟蹤目標(biāo)路徑,且穩(wěn)態(tài)跟蹤誤差接近于零。橫向位置誤差和偏航角誤差分別如圖13和圖14所示。誤差分析結(jié)果如表3所示,從中我們可以發(fā)現(xiàn),無論是橫向位置誤差還是偏航角誤差,跟蹤誤差都隨著縱向速度的增加而增加。由此可得,高速下的路徑跟蹤問題具有更大的挑戰(zhàn)性。
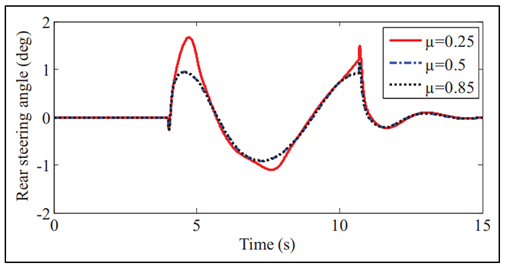
圖11 不同附著系數(shù)路面下的后輪轉(zhuǎn)向角
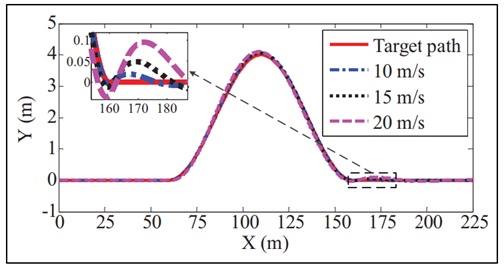
圖12 不同縱向速度下的路徑跟蹤結(jié)果
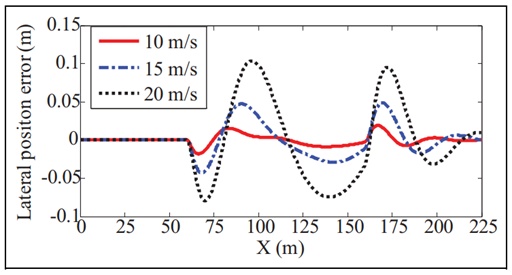
圖13 不同縱向速度下的側(cè)向位移誤差
表3 不同縱向速度下的路徑跟蹤誤差
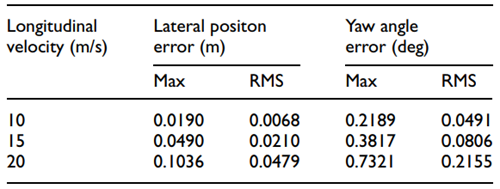
RMS: 均方根值
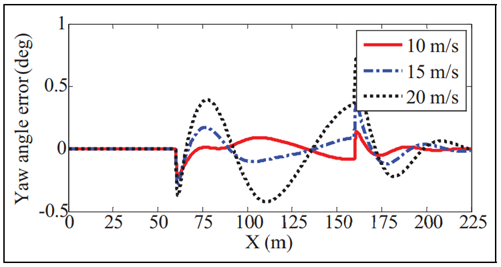
圖14 不同縱向速度下的橫擺角誤差
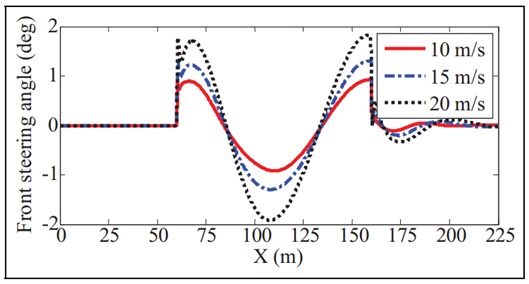
圖15 不同縱向速度下的側(cè)向加速度
在縱向速度小于20m/s時,這個4WS AGV的最大橫向位置誤差可以限制在0.1m內(nèi),最大橫擺角誤差不超過0.8°。
從誤差分析可以總結(jié)出,該路徑跟蹤控制器可以有效跟蹤目標(biāo)路徑,并且在面對系統(tǒng)不確定因素時有良好的魯棒性。
圖15顯示了三種不同縱向速度條件下的側(cè)向加速度??梢园l(fā)現(xiàn),最大的橫向加速度可以達(dá)到接近4m/s。前輪和后輪的轉(zhuǎn)向角分別如圖16和圖17所示。前輪和后輪的轉(zhuǎn)向角都隨著縱向速度的增加而增加,這意味著該4WS AGV需要更大的側(cè)向力來保持系統(tǒng)的穩(wěn)定性和提高路徑跟蹤性能。
6 實驗驗證
為了進(jìn)一步驗證路徑跟蹤控制器的性能,我們用DLC機動裝置進(jìn)行了一次實車實驗。在測試條件下,驅(qū)動電機的最大轉(zhuǎn)速和最大扭矩為800rpm和180N·m。轉(zhuǎn)向電機的最大轉(zhuǎn)向角為30°。考慮到SBW系統(tǒng)的可靠性較差以及駕駛的安全性,車輛的縱向速度被限制在3m/s內(nèi)。測試道路如圖18所示。
圖16 不同縱向速度下的前輪轉(zhuǎn)向角
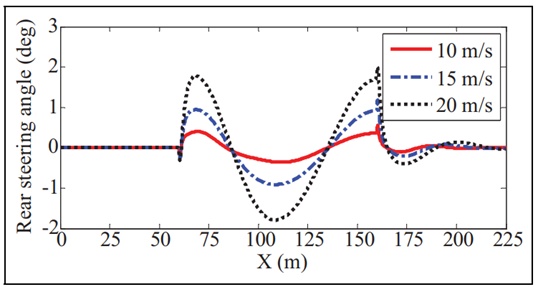
圖17 不同縱向速度下的后輪轉(zhuǎn)向角

圖18 測試道路
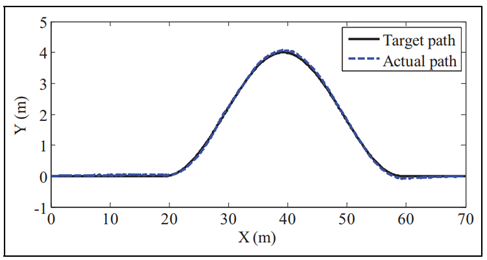
圖19 實車驗證下的路徑跟蹤結(jié)果
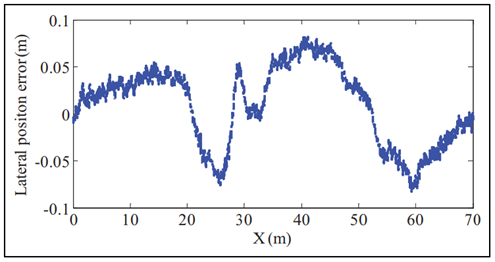
圖20 實車驗證下的側(cè)向位置誤差
圖21 實車驗證下的橫擺角誤差
實車實驗的路徑跟蹤結(jié)果如圖19所示??梢园l(fā)現(xiàn),設(shè)計的控制器在實車實驗條件下可以很好地跟蹤目標(biāo)路徑。此外,圖20和圖21顯示了側(cè)向位置誤差和橫擺角誤差。側(cè)向位置誤差最大為0.08m,組合定位系統(tǒng)的定位精度為0.05m,所以這個誤差非常小。橫擺角誤差最大為3.5°,組合定位系統(tǒng)的偏航角精度為2°,所以橫擺角誤差也非常小。
從誤差分析中,我們可以得出這樣的結(jié)論:本文所設(shè)計的控制器在道路測試中顯示出良好的路徑跟蹤性能。圖22和23分別顯示了橫向加速度測試結(jié)果和四個車輪轉(zhuǎn)向角的變化情況。
7 總結(jié)
本文設(shè)計了一個用于四輪獨立轉(zhuǎn)向無人小車的路徑跟蹤控制器,主要目的在于減小車輛的側(cè)向位置誤差和橫擺角誤差。為了簡化控制器的設(shè)計,使用一個單軌模型來建立路徑跟蹤模型。將LPV系統(tǒng)模型應(yīng)用于控制器設(shè)計,使路徑跟蹤控制器對縱向速度和道路摩擦系數(shù)等參數(shù)擾動獲得良好的魯棒性。路徑跟蹤控制器是在LQR和前饋控制的基礎(chǔ)上設(shè)計的,前饋控制被用來消除干擾引起的誤差。為了評估所設(shè)計的路徑跟蹤控制器的性能,進(jìn)行了仿真和實車試驗。仿真和實驗結(jié)果表明,本文所設(shè)計的控制器不僅表現(xiàn)出良好的路徑跟蹤性能,而且還具有很強的魯棒性,可以處理參數(shù)不確定性問題。
利益沖突聲明
作者聲明與本文的研究、作者身份和/或發(fā)表沒有潛在的利益沖突。
經(jīng)費聲明
本文的研究、撰寫和/或發(fā)表接受了以下財務(wù)支持。這項工作得到了中國國家重點研發(fā)計劃(批準(zhǔn)號:2018YFB0104802)、中國國家自然科學(xué)基金(批準(zhǔn)號:U1564207)和上海汽車工業(yè)科技發(fā)展基金會項目(批準(zhǔn)號:1734)的部分支持。
ORCID ID (科研人員與投稿身份識別碼):

參考文獻(xiàn)


END
聯(lián)系人:張老師
電話:15221659529
郵箱:20666080@#edu.cn



 廣告
廣告 



